

4.3. Декомпозиция цифровых систем
Реализация дискретной передаточной функции на ЭВМ в общем случае может осуществляться тремя различными способами: непосредственной, последовательной или параллельной декомпозицией. Эти три метода декомпозиции иллюстрируются ниже в терминах диаграмм состояния.
Непосредственная декомпозиция.
Предположим, что передаточная функция цифрового регулятора имеет вид
X0(z) bm+1 + bmz-1 + … + b1z-m
D(z) = —— = ————————— ,
E0(z) ak+1 + akz-1 + … + a1z-k
где ak+1 0, m, k – положительные целые числа, X0(z), E0(z) – изображения выходного и входного сигналов цифрового регулятора.
Умножим числитель и знаменатель выражения (2) на вспомогательную переменную R(z). В результате получим
X0(z) (bm+1 + bmz-1 + … + b1z-m) R(z)
—— = ————————————— ,
E0(z) (ak+1 + akz-1 + … + a1z-k ) R(z)
Приравнивание числителей в последнем равенстве дает
X0(z) = (bm+1 + bmz-1 + … + b1z-m) R(z).
Та же операция для знаменателей приводит к выражению
E0(z) = (ak+1 + akz-1 + … + a1z-k ) R(z)
Разрешая последнее выражение относительно R(z), получаем
R(z) = (1/ ak+1) E0(z) – (ak/ ak+1) z-1 R(z) –
- (ak-1/ ak+1) z-2 R(z) - … - (a1/ ak+1) z-k R(z) ( 5 )
Диаграмма состояния для выражения (5) показана на рис. 7 при условии k = m =3. Для простоты на диаграмме не представлены начальные значения. Эта диаграмма может служить основой для программы контроллера; при этом ветви с коэффициентами передачи z-1 реализуются временной задержкой или запоминанием на Т секунд. Цифровую систему управления с диаграммой состояния представленной на рис. 7 можно описать с помощью следующей системы разностных уравнений
r1(k+1) = r1(k)
r2(k+1) = r3(k)
r3(k+1) = - (a1/a4)r1(k) – (a2/a4)r2(k) – (a3/a4)r3(k) + (1/a4)e(k) (6)
Отсюда можно сделать вывод, что непосредственная декомпозиция приводит к модели системы в пространстве состояний в канонической форме фазовой переменной (форма Фробёниуса).
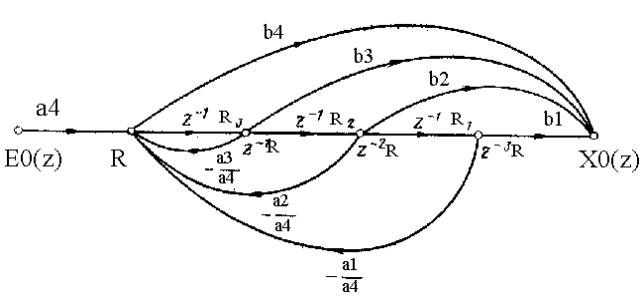
Рис. 7. Диаграмма состояний для передаточной функции (2) при m=k=3, полученная непосредственной декомпозицией
Последовательная декомпозиция.
Если передаточная функция D(z) задана в форме сомножителей, её можно записать в виде произведения передаточных функций первого порядка, каждая из которых реализуется простой программой для контроллера или представляется соответствующей диаграммой состояния. Исходная передаточная функция D(z) в этом случае заменяется последовательным соединением программ или диаграмм состояния, соответствующих передаточным функциям первого порядка.
Рассмотрим передаточную функцию цифровой системы, записанную в виде
C(z) K(z +c1)(z + c2)…(z + cm)
D(z) = —— = ——————————— (7)
R(z) (z + d1)(z + d2)…(z + dn)
где nm; -ci, I = 1, 2, …, m и -dj, j=1, 2, …, n – нули и полюсы D(z) соответственно.
Замечание: форму D(z), задаваемую выражением (7) удобно использовать для действительных нулей и полюсов; в случае комплексных нулей и полюсов могут возникать трудности в программе контроллера при работе с комплексными числами.
Запишем D(z) в виде произведения коэффициента К и передаточных функций первого порядка:
D(z) = KD1(z)D2(z)…Dn(z),
где
z +ck 1 + ckz-1
Dk(z) = ——— = ———— k = 1, 2, …, m (8)
z + dk 1 + dkz-1
1 z-1
Dk(z) = ——— = ———— k = m+1, m+2, …, n (9)
z + dk 1 + dkz-1
|
|
|
|
a) |
б) |
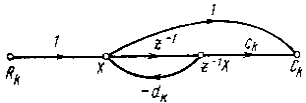

Рис. 8. Диаграммы состояний для выражений Dk(z) (8) и (9)
Диаграммы состояний для выражений (8) и (9) представлены на рис. 8,а и рис. 8,б. Общая программа контроллера получается в результате последовательного соединения элемента K с программами первого порядка для Dk(z), представленными на рис. 8.
Параллельная декомпозиция.
Передаточная функция D(z) может быть реализованан также с помощью параллельной декомпозиции; в данном случае в форме сомножителей необходимо представить только знаменатель D(z). Рассмотрим передаточную функцию цифровой системы в виде
C(z) zm + amzm-1 + … + a2z + a1
D(z) = —— = K ——————————— (10)
R(z) zn + bnzn-1 + … +b2z + b1
где n > m. Предположим, что одинаковые нули и полюсы отсутствуют и что среди n собственных значений i являются различными, а остальные имеют кратность n-I, тогда с помощью разложения на простые слагаемые можно записать
i Kk n Kk
Dk(z) = Σ ——— + Σ ———— (11)
k=1 z + dk k=i+1 (z + dk)k-1
где первое слагаемое соответствует различным собственным значениям dk, k =1, 2, …,I, а вторые – кратным, причем через di+1 = di+2 = … = dn обозначено собственное значение кратности n-i. Для изображения диаграммы состояния перепишем выражение (9) в виде
i Kkz-1 n Kkz-i-k
Dk(z) = Σ ——— + Σ ———— (12)
k=1 1 + dkz-1 k=i+1 (1 + dkz-1)k-i
Теперь передаточная функция D(z) представлена в виде диаграммы состояния, состоящей из блоков рис. 8б, соединённых параллельно. Следует отметить, что параллельная декомпозиция приводит к системе уравнений состояния в канонической форме при различных собственных значениях или в общем случае к системе в жордановой канонической форме.
Пример 1. Рассмотрим передаточную функцию
C(z) z2 + z + 1
D(z) = —— = 10 ———————
R(z) z2 (z – 0.5)(z – 0.8)
собственные значения которой равны г = 0, 0, 0.5, 0.8. Необходимо прообразовать эту передаточную функцию с помощью параллельной декомпозиции и затем определить уравнения динамики данной системы.
В результате разложения D(z) на простые слагаемые имеем
-233,33 127.08 25 106.25
D(z) = ——— + ———— + — + ———
z– 0.5z– 0.8z2z
Передаточная функция D(z) реализуется параллельным соединением звеньев первого порядка, представленных на рис. 9.
Следует заметить, что, поскольку D(z) имеет четвертый порядок, на диаграмме должно быть только четыре блока задержки. На рис. 8 изображена также peaлизация минимального порядка для заданной передаточной функции. Уравнения состояния системы записываются по известной методике. В результате имеем
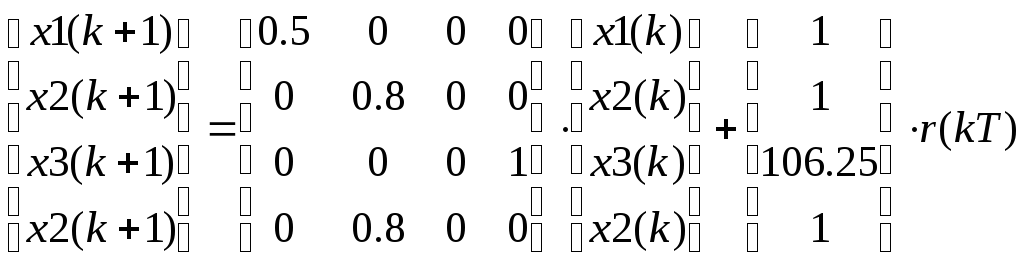
что представляет собой каноническую форму Жордана. Уравнение выхода записывается в виде
c(k) = [-233.33 127.08 1 0] x(k).
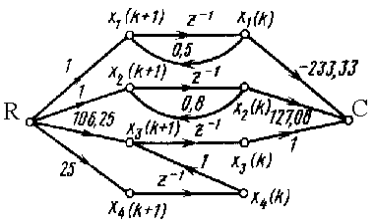
Рис. 9 Диаграмма состояния для примера 1, полученная параллельной декомпозицией