

4. Методы исследования дсау в плоскости z
Структурные схемы цифроаналоговых систем_________________________________
4. Методы исследования дсау в плоскости z
4.1. Структурные схемы цифроаналоговых систем
Общая структура ЦАС может быть представлена как показано на рис. 1. Она содержит аналого-цифровые преобразователи А ЦП,управляемые коммутирующим устройством, выходные преобразователиЦАП,воздействующие на исполнительные устройстваИУ,объект (объекты) управленияОУи цифровое управляющее устройствоЦУУ. Задающие воздействия обозначены на схемеg1, ...,gm, а управляемые величиныy1, ...,ym. Такая система может быть связанной многомерной, если осуществляется управление сложным многомерным объектом, и несвязанной многомерной, если осуществляется управление группой несвязанных одномерных объектов. В последнем случае ЦАС распадается на совокупность одномерных систем.
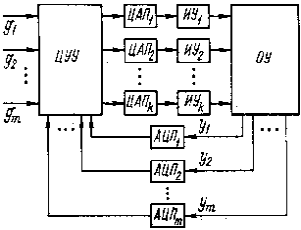
Рис. 1. Структура цифровой автоматической системы
Математический аппарат исследования цифровых систем, учитывающий их импульсный характер, был изложен в гл. 3. Квантование по уровню осуществляется в АЦП. Типичная нелинейная характеристика АЦП изображена на рис. 2. По оси абсцисс отложена входная величина е,которая является непрерывной, а по оси ординат — цифровое представление этой величины (код)e0. Ширина ступеньки характеристики δАпредставляет собой цену единицы младшего разряда. Она определяется в единицах измерения преобразуемой непрерывной величины (вольты, градусы, метры и т. п.). При изменении входной величины АЦП на δАвыходная величина скачком изменяется на единицу младшего разряда.
Нелинейность характеристики АЦП делает всю цифровую систему нелинейной, что осложняет теоретическое исследование. Для упрощения расчетов нелинейная характеристика линеаризуется. Это показано на рис. 2 штриховой линией. Тогда АЦП может быть представлен в виде совокупности трех блоков (рис. 3). Первый блок соответствует линеаризованной части нелинейной характеристики с коэффициентом передачи kA=== 1/ δА.
Звено 2с пилообразной характеристикой учитывает нелинейную добавку, которую дает действительная исходная характеристика. Наклон каждого «зубца» характеристики равен такжеkА. Звено3соответствует ограниченно-линейному звену с единичным коэффициентом передачи линейного участка и насыщением», которое будет иметь место во всех реальных АЦП.
Число отличных от нуля уровней одной ветви рассматриваем мой характеристики АЦП определяется по формуле
μ = 2α1– 1 =emax/ δА,
где α1 = число двоичных разрядов, а emax– максимальное значение входной величины преобразователя.
Линеаризация входного преобразователя означает по сути дела, что из трех звеньев, изображенных на рис. 3, рассматривается только звено 1. При этом максимальная ошибка, вызванная отбрасыванием звена 2,не будет превышать δА/2. Для того чтобы как-то учесть влияние отброшенного звена 2, это звено заменяется источником шума квантования. Если исходить из предположения, что в каждом такте работы цифрового устройства ошибка округления лежит в пределах ± δА/2 и подчиняется равновероятному закону распределения, то дисперсия шума округления в АЦП оказывается равнойDA= δА2/12.
|
|
|
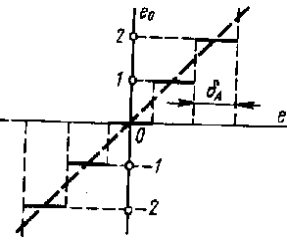

Рис. 2. Характеристика АЦП Рис. 3. Эквивалентное представление АЦП
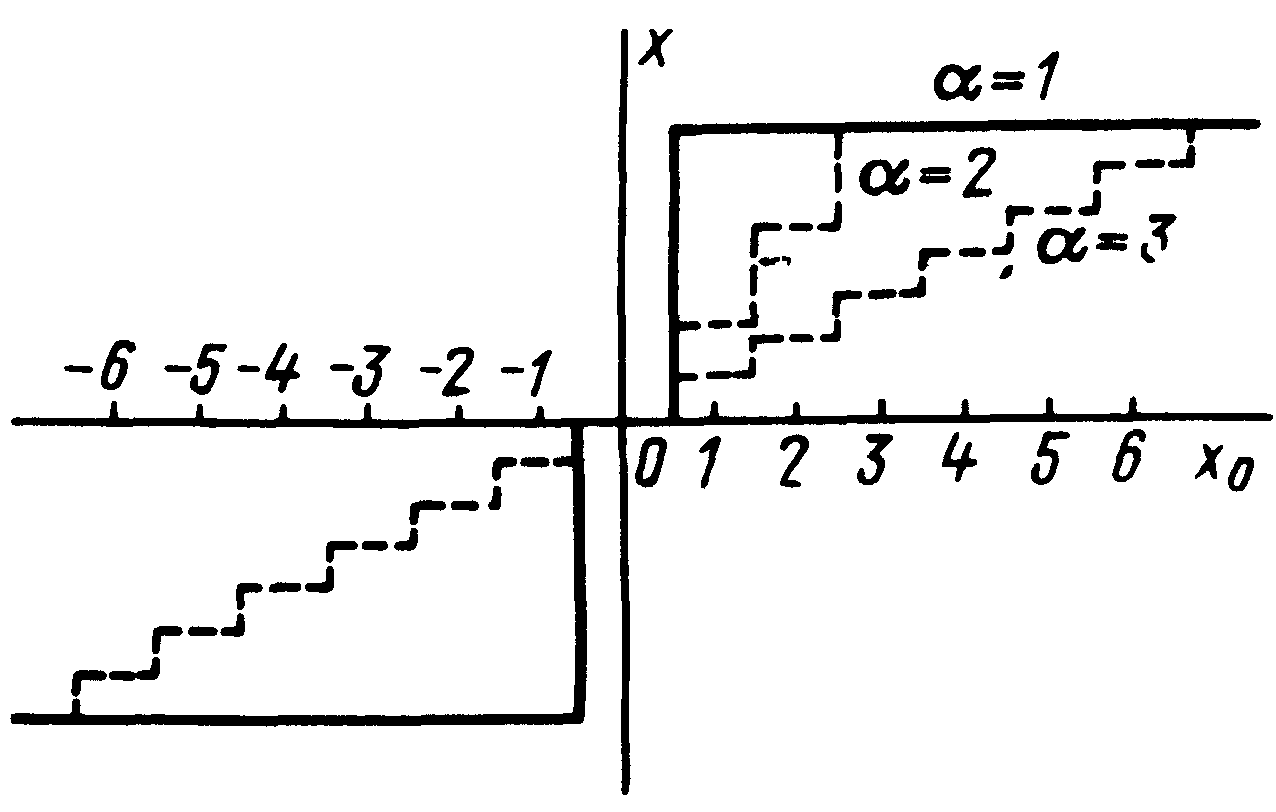
Статическая характеристика выходного преобразователя ЦАП имеет аналогичный изображенному на рис. 2 вид. При этом по оси абсцисс откладывается цифровое значение выходной величины цифрового управляющего устройства x0 (код), а по оси ординат — некоторая непрерывная величинаx(обычно электрическое напряжение). Цена единицы младшего разряда δЦпредставляет собой высоту одной ступеньки и определяется в единицах измерения выходной величины ЦАП. Общий линеаризованный коэффициент передачи преобразователя равенkЦ= δЦ/1 = δЦ. Выходной преобразователь может быть заменен эквивалентной схемой, аналогичной изображенной на рис. 4, с тремя блоками.
Однако в выходном преобразователе получается дополнительная генерация шума квантования только в том случае, когда цифровое управляющее устройство имеет дополнительные младшие разряды в его арифметическом устройстве. 6 этом случае полученный результат предварительно округляется, а затем поступает на выход. Эффект округления и вызывает появление шума квантования.
|
Рис. 4. Примеры статических характеристик ЦАП |
Максимальная ошибка округления составляет δЦ /2. При равновероятном законе распределения ошибок округления дисперсия шума квантования, отнесенного к выходу управляющего устройства, составит dЦ = δЦ/12. При отсутствии дополнительных разрядов никакого округления не происходит. Заметим, что в случае переполнения разрядной сетки цифрового устройства происходит выход на участок насыщения (блок 3 на рис. 3). При этом отбрасываются значения не младших, а старших разрядов. |
Структурная схема замкнутой системы изображена на рис 5 задающее воздействие обозначено g (t),управляемая величина —y{t),ошибкасистемы - е (t) =g(f)-у (f).Схема содержит входной преобразовательА ЦП,установленный в канале ошибки цифровое управляющее устройствоЦУУ,выходной преобразовательЦАПи объект управления ОУ.
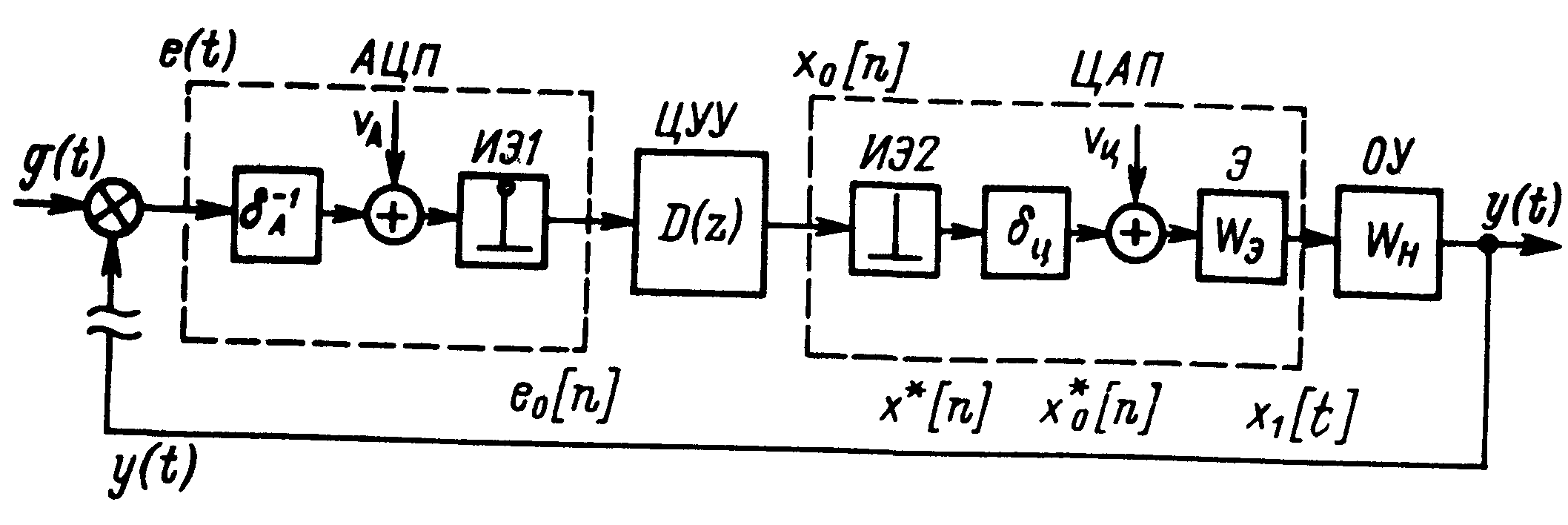
Рис. 5. Структурная схема одномерной системы управления
Входной преобразователь представлен в виде линеаризованной части с коэффициентом передачи kf,= 1/ δА, источником шума квантованияVAи идеального импульсного элемента первого рода ИЭ1, который непрерывную функцию времени превращает в решетчатую.
Цифровое управляющее устройство представлено в виде блока с передаточной функцией D(z).
Выходной преобразователь ЦАПпредставлен в виде линеаризованной части с коэффициентом передачиkЦ== δЦ, источником шума квантованияvЦ(его может и не быть), идеального импульсного элемента второго родаИЭ2,преобразующего дискретную последовательность x0[n] в последовательность δ -функцийx*[n], т. е. последовательность бесконечных по высоте и бесконечно коротких импульсов, и экстраполятора Э, превращающего эти импульсы в постоянные в течение такта значениях1 (t),которые затем воздействуют на объект управления.
Введение в структурную схему на рис. 5 идеального импульсного элемента второго рода сделано с целью формального изображения экстраполятора в виде динамического звена с передаточной функцией Wэ(s). Непрерывный управляемый объект представлен в виде звена с передаточной функцией Wн(s), которая в общем случае может содержать элемент запаздывания.
Для описания схемы на рис. 5 необходимо определить передаточные функции непрерывной части совместно с экстраполятором, передаточной функции управляющего устройства, а также передаточных функций разомкнутой и замкнутой системы. Отличие структурной схемы цифровой системы управления рис. 5 от рассмотренных в главе 3 структур импульсных систем состоит в присутствии передаточной функции цифрового управляющего устройства D(z).