лекции / Лекции дсау / ДСАУ 4_5_1
.doc4. Методы исследования ДСАУ в плоскости z
Анализ устойчивости цифровой системы_______________________________________
4.5. Синтез системы управления в плоскости z
4.5.1. Постановка задачи
Задача синтеза замкнутой ДСАУ состоит в установлении её желаемых характеристик, в частности, дискретной передаточной функции Фж(z). Это осуществляется изменением структуры и выбором параметров коррекции. Желаемые характеристики замкнутой системы определяются исходя из следующих положений:
-
заданных показателей качества (показателей колебательности, перерегулирования, времени переходного процесса, статической ошибки);
-
свойств процесса (конечного времени переходного процесса, устранения влияния запаздывания);
-
оптимальности достигаемых процессов в том ил ином смысле (например, минимальности времени переходного процесса – максимума быстродействия, минимума среднеквадратичных ошибок при воспроизведении случайных сигналов управления и т.п.).
Желаемые характеристики замкнутых ДСАУ не могут быть заданы произвольно. Они должны удовлетворять определенным условиям, которые обеспечивают реализуемость характеристик скорректированной разомкнутой ДСАУ и ее грубость.
Следует заметить, что выполняя синтез в плоскости z мы оперируем с разрывными временными характеристиками – решётчатыми функциями. Кроме того, значения решетчатых функций зависят от выбранного интервала квантования Т. Поэтому при изменении периода квантования изменяются и значения коэффициентов полиномов числителя и знаменателя заданной (желаемой) дискретной передаточной функции (ДПФ) системы. Известно, что при увеличении такта квантования абсолютные значения коэффициентов аi полинома знаменателей ДПФ уменьшаются, а коэффициентов полинома числителя bi – увеличиваются, причем
Σ bi = 1 + Σ ai (1)
увеличивается.
Синтезируемую систему будем строить по схеме рис.6 п.4.2.3. Сформулируем задачу синтеза таким образом: известна передаточная функция объекта W0(z); требуется найти передаточную функцию последовательной цифровой коррекции D(z) таким образом, чтобы получить желаемую передаточную функцию замкнутой системы Фж(z).
D(z)W0(z)
Ф(z) = (2)
1+D(z)W0(z)
Положив Ф(z) Фж(z), получаем условие для последовательной цифровой коррекции:
1 Фж(z)
D(z) = ּ (3)
W0(z) 1 - Фж(z)
Выражение (3) позволяет решить задачу определения ДПФ D(z), так как в него входят известные передаточные функции объекта управления и желаемой системы. Однако можно показать, что выбранный по соотношению (3) закон управления может оказаться нереализуемым.
Найдем передаточную функцию замкнутой системы от входа g(t) до выходного сигнала цифрового регулятора x0[nT], она равна:
X0(z) D(z)
Ф(z) = =
G(z) 1+D(z)W0(z)
или
1
Фр(z) = Фж(z)
W0(z)
Если передаточная функция объекта управления W0(z) = B(z)/A(z), то
A(z)
Фр(z) = Фж(z).
B(z)
Последнее соотношение показывает, что передаточная функция регулятора определяется не только полюсами Фж(z), но и нулями W0(z). Поэтому для получения работоспособного регулятора с передаточной функцией D(z) необходимо, чтобы нули объекта – корни полинома B(z) – zi были по модулю меньшими единицы: |zi|<1.
Таким образом, формальное решение задачи синтеза, основанное на непосредственном использовании формулы (3), может привести к реализации систем, которые не обладают свойствами робастности (грубости) или могут быть неустойчивыми.
Для построения физически реализуемых робастных систем следует иметь ввиду следующие обстоятельства:
-
Последовательная коррекция может применяться только для минимально-фазовых, устойчивых и физически реализуемых линейных математических моделей объектов.
-
Линейная модель последовательного регулятора должна обладать свойствами физической реализуемости, быть минимально-фазавой и устойчивой.
-
Грубость замкнутой системы к вариациям параметров объекта требует соблюдения двух условий:
-
физической реализуемости, минимально-фазности и устойчивости дискретной передаточной функции объекта и регулятора;
-
затухания (устойчивости) импульсных переходных характеристик.
4.5.2. Синтез с использованием корневых годографов на z-плоскости
-
Связь между расположением полюсов и нулей на z-плоскости с параметрами переходной характеристики дискретной системы
Ранее (см. раздел 3.2.3.) было установлено соответствие между областями s- и z-плоскостей. Для непрерывных систем известна связь между положением на s-плоскости корней характеристического уравнения и переходной функцией. Например, комплексно-сопряженные корни, расположенные в левой половине s-плоскости, обусловливают экспоненциально затухающие синусоидальные процессы; корни на отрицательной части действительной оси соответствуют монотонно затухающим процессам; простые сопряженные корни на мнимой оси приводят к возникновению незатухающих гармонических колебаний с постоянной амплитудой. Кратные корни на мнимой оси и корни в правой половине s-плоскости соответствуют расходящимся процессам.
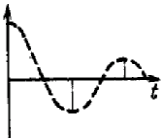
Хотя мы и установили связь между s- и z -плоскостями, однако операция квантования в цифровых системах вызывает эффекты, требующие особого внимания. Если, например, импульсная теорема не выполняется, то эффект смещения полюсов в результате квантования может привести к искажению реакции системы. На рис. 1,а изображены полюсы передаточной функции непрерывной системы второго порядка, а на рис. 1,б - свободное движение системы. Если в системе производится квантование с частотой ωs, причем ωs < ω1, то эта операция порождает на s-плоскости бесконечное множество полюсов s = σ1 ± jω1 + jnωs, n=±l,±2,... . Как показано на рис. 2, а, операция квантования смещает полюсы в основную полосу - ωs/2 < ω < ωs/2, в результате чего эффект будет таким же, как если бы исходная система имела полюсы s = σ1±j(ωs – ω1).

Рис. 1. Полюсы непрерывной системы второго порядка и свободное движение системы
Рис. 2,б иллюстрирует рассмотренный случай на z-плоскости. На рис. 2,в с помощью дискретного сигнала показан эффект смещения частоты, проявляющийся в том, что при наличии прерывания в системе кажущаяся частота колебаний имеет значение ωs – ω1, тогда как в действительности она равна ω1.
|
|
|
|


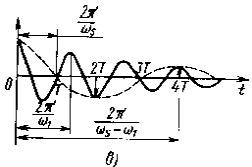
Рис. 2. Расположение полюсов на s- и z-плоскостях, иллюстрирующее эффект смещения частоты
В табл.1 приведены примеры расположения корней системы второго порядка на s- и z-плоскостях и соответствующие им временные характеристики. Приведенные выше соображения о связи между временными характеристиками и положением на z-плоскости корней характеристического уравнения относились к системам второго порядка. Однако эти соображения сохраняют силу и для систем более высокого порядка, доминирующие полюсы которых позволяют свести их к эквивалентным системам| второго порядка.
Таблица 1.
Расположение корней на s- и z-плоскостях и соответствующие временные характеристики
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|