лекции / Лекции дсау / ДСАУ 4_5_2
.doc4. Методы исследования ДСАУ в плоскости z
Синтез с использованием корневых годографов__________________________________
Если характеристическое уравнение дискретной системы имеет комплексные корни, расположенные на z-плоскости внутри единичной окружности, то переходная функция системы будет иметь колебательный характер с положительным затуханием. Вообще, чем ближе эти комплексные корни к единичной окружности, тем более колебательным является переходный процесс. Целесообразно установить связь между положением полюсов и нулей передаточной функции замкнутой цифровой системы и максимальным перерегулированием и временем максимума Tmax её переходной характеристики.
Для непрерывной системы второго порядка, имеющей в замкнутом состоянии передаточную функцию вида
C(s) ωn2
W(s) = —— = ——————— (1)
R(s) s2 + 2ξωns + ωn2
максимум переходной характеристики и время этого максимума определяются следующими выражениями:
cmax = 1 + exp(-ξπ / (1-ξ2)); Tmax = π / (ωn (1-ξ2)) (2)
Для систем, порядок которых выше второго, невозможно получить простые соотношения между cmax, Tmax и положением полюсов и нулей передаточной функции. Однако, если систему можно охарактеризовать только парой доминирующих полюсов (т.е. полюсов передаточной функции замкнутой системы, которые имеют определяющее значения для переходной характеристики), а остальные полюсы и нули находятся далеко слева на s-плоскости, то влияние последних на переходную характеристику незначительно. При этом условии cmax и Tmax можно оценивать выражениями (2), соответствующими передаточной функции (1).
● Рассмотрим, например, следующую передаточную функцию системы четвертого порядка:
C(s) K
W(s) = —— = ————————————— (3)
R(s) (s + p1)(s + p2)(s2 + 2ξωns + ωn2)
где p1 и p2 – действительные константы. Если p1 и p2 по крайней мере в 5 раз больше, чем ξωn, то два полюса в точках - p1 и - p2 будут давать незначительный вклад в переходную характеристику, а полюсы
s = - ξωn + jωn(1-ξ2) и s = - ξωn - jωn(1-ξ2)
являются доминирующими. Однако просто отбросить члены (s + p1) и (s + p2) в выражении (3) нельзя, так как они оказывают влияние на качество установившегося режима системы.
4.5.2. Синтез с использованием корневых годографов на z-плоскости
-
Корневые годографы цифровых систем управления
Как известно, корневой годограф непрерывной системы управления, по существу, является диаграммой траектории корней характеристического уравнения как функцией некоторого параметра K, который изменяется от - до +. Корневой годограф дает возможность судить об абсолютной и относительной устойчивости системы управления в зависимости от этого параметра.
Поскольку характеристическое уравнение линейной стационарной цифровой системы управления является рациональным полиномом относительно z, то те же правила, которые используются для построения корневых годографов на s-плоскости, могут быть применены и на z-плоскости. В принципе корневой годограф цифровой системы управления можно построить на s-плоскости, воспользовавшись характеристическим уравнением, полученным из полинома в знаменателе передаточной функции замкнутой системы C*(s)/R*(s), однако он будет содержать бесконечное число ветвей. Чтобы проиллюстрировать трудности анализа цифровых систем на s-плоскости, рассмотрим импульсную передаточную функцию замкнутой цифровой системы управления, заданную в виде
![]() (1)
(1)
где G*(s) — дискретная функция от
![]() (2)
(2)
Итак,
![]() (3)
(3)
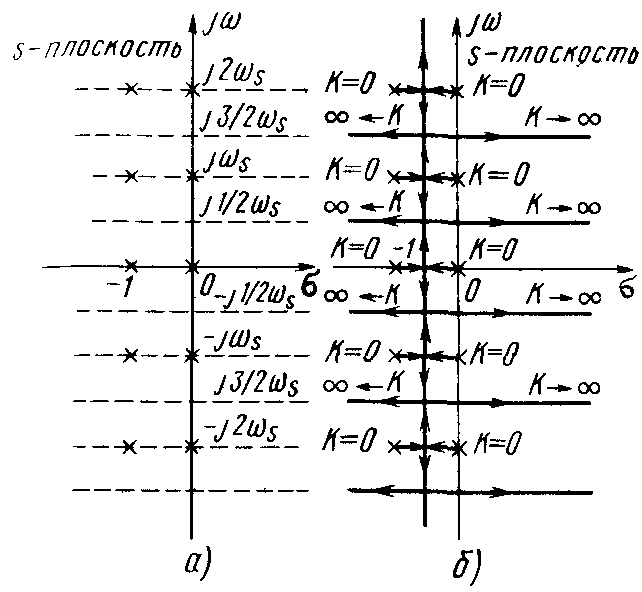
Известно, что траектории корней уравнения 1 + G*(s) = 0 могут быть построены на основе информации о полюсах и нулях передаточной функции разомкнутой системы G*(s). В данном случае функция G*(s) имеет бесконечное число полюсов, как показано на рис. 1,а. Следовательно, корневой годограф уравнения 1 + G*(s) = 0 содержит бесконечное число ветвей, как показано на рис. 1,б. Ясно, что для цифровых систем управления с более сложными передаточными функциями построение корневых годографов на s-плоскости будет более трудоемким.
Использование z-преобразования отображает бесконечное число полюсов и нулей, а значит, и траекторий корней на s-плоскости в конечное число на z-плоскости. Для системы, описываемой уравнением (1), преобразование дает
![]() (4)
(4)
а корни характеристического уравнения находят путем решения
![]() (5)
(5)
где в соответствии с G(s) вида (6-53)
![]() (6)
(6)
Теперь траектории корней характеристического уравнения
![]() (7)
(7)
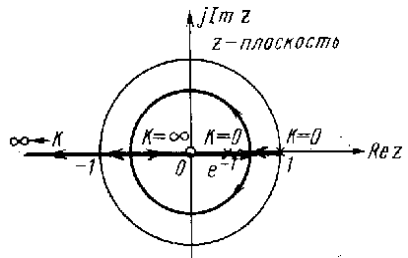
при изменении К от 0 до выглядят с учетом расположения нулей и полюсов G(z) так, как показано на рис. 2. Поскольку уравнение (7) имеет второй порядок, то корневой годограф на рис. 2 состоит только из двух ветвей.
|
Рис. 1. Расположение полюсов G* (s) и корневой годограф системы (1) — (3) : а - полюсы G*(s); б — корневой годограф |
Рис. 2. Траектории корней характеристического уравнения (7) при изменении К от 0 до
|
Если на z-плоскости построен корневой годограф цифровой системы управления, то по траекториям корней можно судить как об абсолютной, так и об относительной устойчивости системы. Условие абсолютной устойчивости требует, чтобы при данной совокупности параметров системы все корни характеристического уравнения лежали на z-плоскости внутри единичной окружности. В то же время расположение корней указывает и на относительную устойчивость. В связи с этим нас интересуют следующие вопросы: Если система устойчива, то насколько она устойчива и как хороша? Удовлетворяет ли качество переходного процесса системы требованиям проектировщика? В частности, мы желаем иметь информацию о некоторых показателях качества таких, как максимальное перерегулирование и время максимума переходной функции, которые тесно связаны с коэффициентом затухания, фактором затухания и собственной частотой колебаний. Таким образом, проблема анализа относительной устойчивости на z-плоскости, по сути дела, сводится к исследованию положения корней характеристического уравнения относительно кривых постоянного фактора затухания, постоянного коэффициента затухания и постоянной частоты. Эти кривые были рассмотрены в п. 3.2.3.
|
Рис. 3. Линии постоянного фактора затухания на s- и z-шюскостях: 1 - единичная окружность
|
Кривые постоянного фактора затухания на z-плоскости представляет собой семейство концентрических окружностей с центром в начале координат; радиус окружности, соответствующий фактору затухания σ1, равен e-σ1T. Одна из таких кривых и соответствующая ей линия на s-плоскости показаны на рис. 3. Если при синтезе требуется, чтобы система имела наименьший фактор затухания σ1 или наибольшую постоянную времени 1/σ1, то все корни характеристического уравнения системы должны лежать слева от линии s = - σ1 на s-плоскости и |
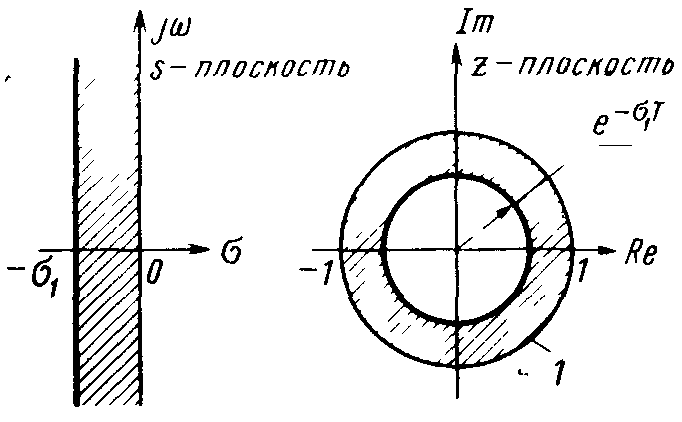
соответственно внутри окружности |z| = e-σ1T (σ1>0) на z-плоскости, как показано на рис.3.
Линии постоянной частоты являются прямыми, исходящими из начала координат z-плоскости под углами θ = ωТ рад относительно положительного направления действительной оси.
Кривые постоянного коэффициента затухания на z-плоскости представляют собой семейство логарифмических спиралей, за исключением случаев ξ = 0 и ξ = 1. Типичные линии постоянного значения ξ для ξ = 0,5 на s- и z-плоскостях изображены на рис. 4. Если при синтезе должен быть обеспечен определенный максимальный коэффициент затухания, то все корни характеристического уравнения должны лежать левее линии постоянного значения ξ на s-плоскости или внутри соответствующей логарифмической спирали нa z-плоскости.
Поскольку большинство систем управления обладают характеристиками типа фильтра нижних частот, то на практике достаточно использовать только основную полосу s-плоскости. Тем самым предполагается, что удовлетворяются условия импульсной теоремы, т.е. высшая частотная составляющая в системе меньше чем 2ωs. Для этого случая на рис. 5 изображены линии постоянного коэффициента затухания для различных значений ξ для положительной половины основной полосы на s-плоскости и соответствующий кривые на z-плоскости. Линии постоянного значения ξ для –ωs/2ω0 являются зеркальным отображением кривых на рис. 5 относительно действительной оси.
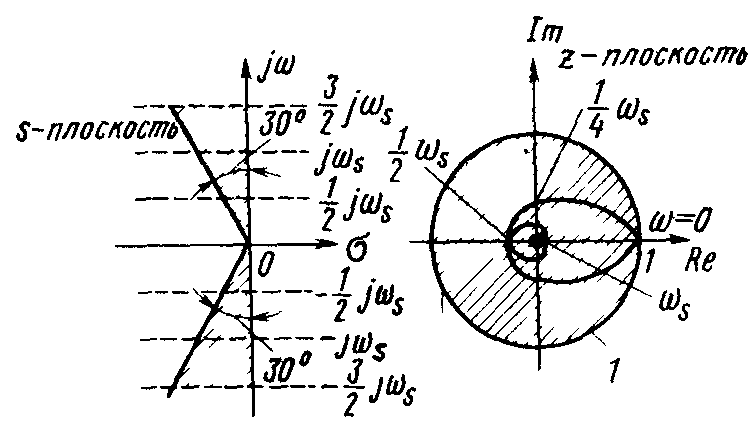
Рис. 4Линии постоянного коэффициента затухания на s- и z-плоскостях для ξ =• 0,5

Рис. 5. Линяй постоянного значения ξ на s-плоскости для периодической полосы от 0 до jωs/2 (а) и соответствующие этим линиям кривые на z-плоскости(б)
|
|
|
|
Рис. 6. Корневой годограф цифровой системы |
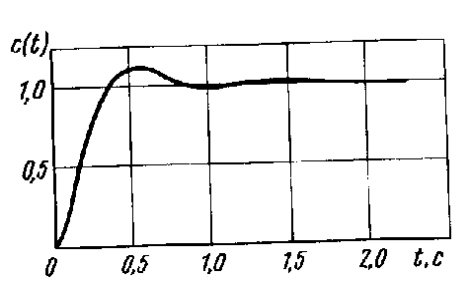
Рис. 7. Переходная функция системы из примера 1 |