

лекции / Лекции дсау / ДСАУ 4_2
.doc4. Методы исследования ДСАУ в плоскости z
Синтез с использованием корневых годографов__________________________________
2. Синтез цифровой системы с использованием корневых годографов
Синтез системы управления методом корневого годографа можно рассматривать, как задачу о размещении ее полюсов на z-плоскости, решаемую экспериментально путем подбора. Иными словами, синтез с помощью корневого годографа по существу состоит в определении параметров системы и регулятора таким образом, чтобы корни характеристического уравнения занимали желаемое положение. Для систем, порядок которых выше третьего, вообще очень трудно установить связь между параметрами регулятора и корнями характеристического уравнения. Кроме того, обычный корневой годограф допускает одновременное изменение только одного параметра. Именно поэтому синтез цифровой системы управления с помощью корневого годографа на z-плоскости является методом подбора. Иначе говоря, проектировщик может поручить ЭВМ вычертить большое количество корневых годографов путем перебора в широком диапазоне возможных значений параметров регулятора, а затем выбрать наилучшее решение. Однако опытный проектировщик может разумным образом сделать первоначальные "прикидки" так, чтобы свести к минимуму количество проб. Поэтому будет полезно исследовать влияние расположения полюсов и нулей цифрового регулятора на качество всей системы и корни ее характеристического уравнения.
● Регуляторы с опережением и с отставанием по фазе. Рассмотрим регулятор, описываемый передаточной функцией первого порядка
![]() (1)
(1)
где z1 — действительный нуль; p1 — действительный полюс. Если цифровой регулятор не должен влиять на качество установившегося режима системы, то полагаем
![]() (2)
(2)
Тогда Кс в выражении (1) принимает значение
 (3)
(3)
В зависимости от соотношения величин z1 и р1 можно классифицировать Gc (z) как регулятор типа фильтра нижних частот или типа фильтра верхних частот. Подставляя z = еTs в (1), получим
 (4)
(4)
Очевидно, что Gс*(s) имеет бесконечное число полюсов и нулей. Однако если рассматривать только полюсы и нули, расположенные в основной полосе s-плоскости, то нуль Gс*(s)
![]() (5)
(5)
а полюс
![]() (6)
(6)
где z1 и р1 - действительные числа. Выражение (4) в основной полосе| s-плоскости аппроксимируется следующей рациональной функцией:
 (7)
(7)
Иной подход состоит в аппроксимации eTs первыми двумя членами разложения экспоненты в степенной ряд. Тогда запишем (4) в виде
 (8)
(8)
Этот вариант предпочтительнее, поскольку выражение (7) не допускает отрицательных значений z1 и р1. В качестве иллюстрации рассмотрим передаточную функцию цифрового регулятора:
![]()
используя (7), имеем
![]()
а формула (8) даёт
![]()
Таким образом, Gc (z) можно рассматривать как фильтр нижних частот, поскольку полюс этой функции расположен на s-плоскости, правее ее нуля. Поэтому передаточная функция Gc (z), определяемая выражением (9), соответствует регулятору с характеристикой типа фильтра нижних частот. Расположение полюсов и нулей функций ( ) и ( ) показано на рис. 7, при этом рис. 7,6 можно рассматривать как типичную картину для цифрового регулятора первого порядка с отставанием по фазе. Необходимо подчеркнуть, что аппроксимация Gc (z) выражением Gc* (s) сделана исключительно с той целью, чтобы определить, к какому типу относится характеристика фильтра с передаточной функцией
Gc (z).

Рис. 7. Расположение полюсов и нулей: а – функция Gc* (s) для регулятора с отставанием по фазе, б – функция Gc(z) для регулятора с отставанием по фазе.
В общем случае регулятор с отставанием по фазе может иметь полюс в правой половине и один нуль в левой половине z-плоскости (оба внутри единичной окружности) либо и полюс, и нуль на отрицательном направлении действительной оси внутри единичной окружности, причем полюс расположен правее нуля. Однако эти ситуации не столь эффективны при стабилизации системы, как расположение типа "диполь", показанное на рис. 7.
Аналогичным образом можно показать, что для фильтра верхних частот нуль на ^-плоскости всегда находится справа от полюса на отрицательном направлении действительной оси; то же самое справедливо для относительного расположения нуля и полюса G^ (z) на z-плоскости. На рис. 8 изображены три возможных варианта расположения нуля и полюса функции Gc (z), соответствующей фильтру верхних частот первого порядка.
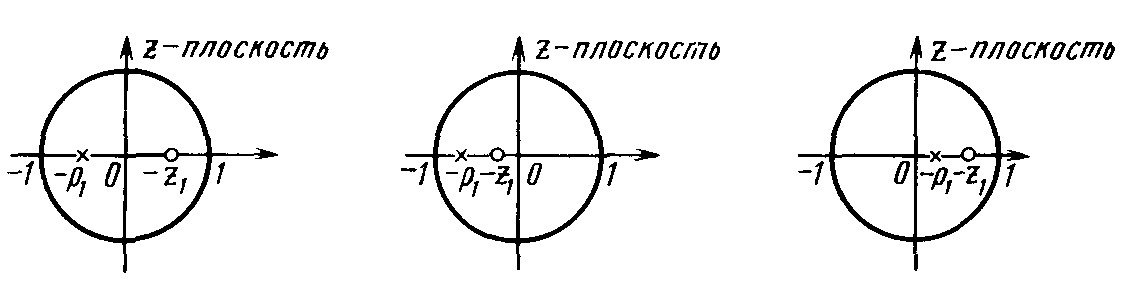
Рис.8. Варианты расположения полюса и нуля функции Gc(z), соответствующей фильтру верхних частот
● Метод контуров корней. Обычно при построении корневого годографа замкнутой системы управления варьируемым параметром считают коэффициент усиления К, а остальные параметры системы полагаются постоянными. Однако часто необходимо исследовать влияние изменения не только коэффициента усиления К, но и других параметров. Для этой цели используется контур корней, который, по сути дела, является корневым годографом, сохраняя все его свойства. Единственное отличие заключается в том, что варьируемым параметром на контуре может быть любой другой параметр системы, кроме коэффициента усиления.
● Синтез на основе взаимной компенсации полюсов и нулей. При синтезе систем управления на s- или z-плоскости имеет смысл попытаться скомпенсировать нежелательные полюсы и нули передаточной функции управляемого процесса полюсами и нулями регулятора и добавить новые, более подходящие, полюсы и нули, чтобы удовлетворить выдвинутым требованиям. Подобный метод часто применяется в системах, где управляемый процесс имеет комплексные полюсы, а к устойчивости предъявляются весьма жесткие требования. На первый взгляд компенсация нежелательных полюсов и добавление новых (желаемых) - это простейший путь решения любой задачи. Однако надо иметь в виду, что для широкого класса задач синтеза коррекция путем компенсации полюсов и нулей далеко не всегда дает удовлетворительное решение. Может оказаться, что полученный регулятор будет слишком сложным или, если нежелательные полюсы процесса расположены на z-плоскости близко от единичной окружности, неидеальная компенсация (что почти всегда имеет место на практике) может сделать систему условно устойчивой. В качестве простой иллюстрации эффекта неидеальной компенсации рассмотрим корневые годографы (рис. 9).
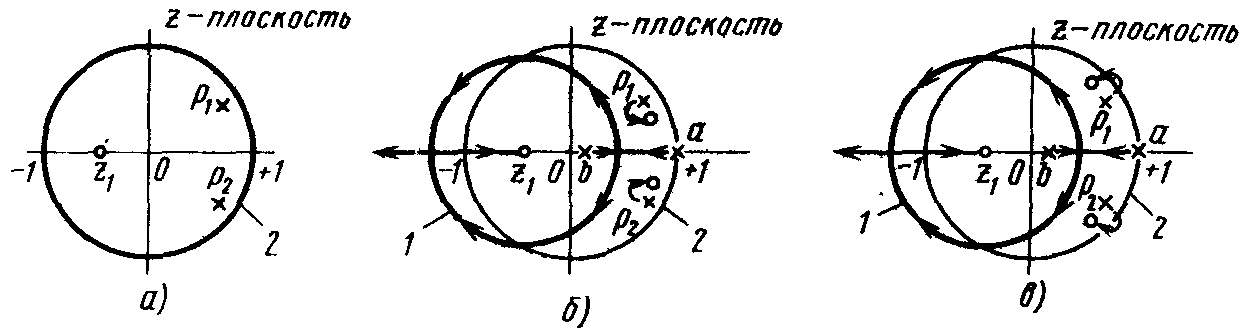
Рис. 9. Корневые годографы, иллюстрирующие эффект неидеальной компенсации нежелательных полюсов: 1 – корневой годограф; 2 – единичная окружность
На рис. 9,в показано расположение нулей и полюсов передаточной функции некоторой разомкнутой цифровой системы. Чтобы скомпенсировать комплексные полюсы p1 и р2 и добавить новые полюсы z = a z = b, введем цифровой регулятор с передаточной функцией
![]() (9)
(9)
На рис. 9, б изображен случай неидеальной компенсации, когда комплексные нули регулятора не в точности равны полюсам p1 и р2 управляемого процесса. При таком относительном расположении полюсов и нулей неидеальная компенсация не оказывает отрицательного влияния на качество системы, поскольку полюсы замкнутой системы, находящиеся около p1 и p2, весьма близки к двум нулям регулятора и соответствуют устойчивой системе. Если же полюсы и нули при неидеальной компенсации расположены так, как показано на рис. 9, в, то часть ветвей корневого годографа между ними может выйти за пределы единичной окружности. Такая система называется условно устойчивой, потому что она устойчива только при малых и больших значениях коэффициента усиления. Таким образом, применяя данный метод синтеза систем управления, надо иметь в виду, что неидеальной компенсации избежать нельзя, и быть уверенным, что это не отразится на устойчивости системы.