


Методические указания к курсу лабораторных работ по дисциплине “Основы ТАУ”
направление 6.091500 “Компьютерная инженерия”
Понятие управляемость связано с возможностью приведения системы в заданное состояние с помощью входных или управляющих воздействий.
Критерий управляемости для линейных стационарных систем. Теорема Калмана I
Система будет управляемой тогда и только тогда, когда матрица управляемости Q имеет ранг n
Q = [B, AB, A2P B,P ..., AnP -1B];P rankQ = n, (12)
где n - размерность пространства состояний.
Очевидно, что управляемость определяется свойствами матриц А и В. Условием управляемости является невырожденность матрицы А.
Понятие наблюдаемости связано с возможностью определения переменных состояния по результатам измерения выходных переменных.
Критерий наблюдаемости для линейных стационарных систем. Теорема Калмана II
Система будет наблюдаема тогда и только тогда, когда матрица наблюдаемости N имеет ранг n, равный размерности пространства состояния.
 ; (13)
; (13)
или в транспонированном виде
NTP P = [C CA CA ... CA2P P CAnP -1];P rankN = n
Очевидно, что наблюдаемость определяется свойствами матриц А и С.
Условием наблюдаемости системы является невырожденность матрицы САnP -
1.P
6.Типовые звенья САУ
Вбольшинстве случаев, когда дело приходится иметь со сложными системами, математическое описание всей системы начинается с разбиения ее на простейшие звенья, обладающие направленностью действия, и описания этих звеньев.
Звеном направленного действия называется звено, которое передает воздействие только в одном направлении - со "входа" одного звена на "вход" другого, так, что изменение состояния первого звена не влияет на состояние предшествующего звена, работающего на его вход.
обновление от 16.02.2004
|
|
|
ЧДТУ 2004 |
110 |
|
|
|
|
Методические указания к курсу лабораторных работ по дисциплине “Основы ТАУ”
направление 6.091500 “Компьютерная инженерия”
В результате при разбиении системы на звенья направленного действия, математическое описание каждого такого звена может быть составлено без учета его связей с другими звеньями.
Описание типовых динамических звеньев подробно рассматривается в лекционном курсе. Найти описание типовых звеньев можно также в учебниках по теории автоматического управления или регулирования [1,2,3,4,5]. Примеры математического описания простейших звеньев которые понадобятся в данном лабораторном практикуме приведены ниже.
Апериодическое звено (рис. 3)
Передаточная функция апериодического звена:
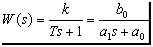 , (14)
, (14)
где k - передаточный коэффициент, Т - постоянная времени Уравнения в пространстве состояний для апериодического звена:
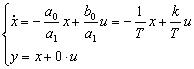 . (15)
. (15)
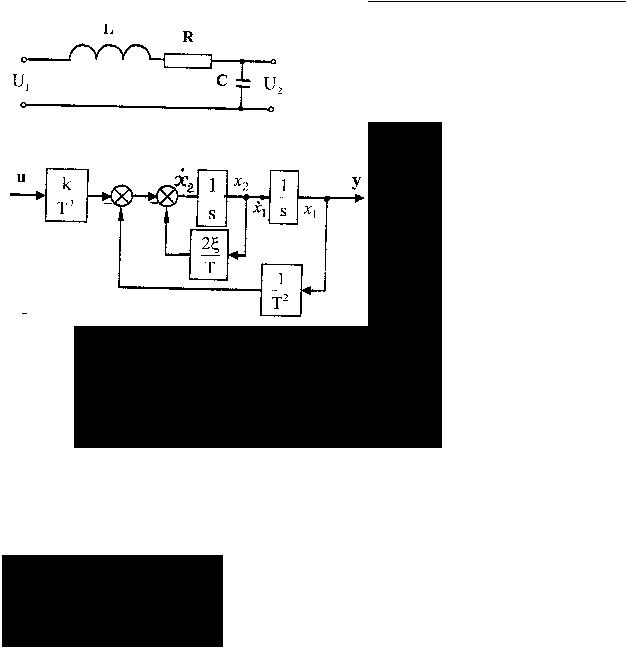
Рис. 3. Принципиальная электрическая схема и структурная схема апериодического звена.
Колебательное звено (рис. 4)
Передаточная функция колебательного звена:
 , (16)
, (16)
где: e - коэффициент демпфирования
Уравнения в пространстве состояний для колебательного звена:
обновление от 16.02.2004
|
|
|
ЧДТУ 2004 |
111 |
|
|
|
|
Методические указания к курсу лабораторных работ по дисциплине “Основы ТАУ”
направление 6.091500 “Компьютерная инженерия”
Рис. 4. Принципиальная схема и структурная схема колебательного звена
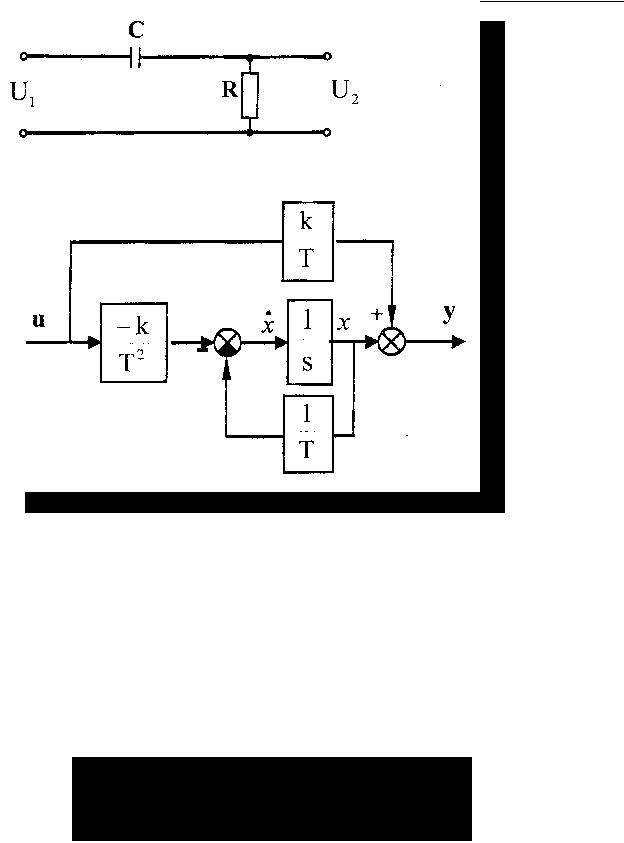
Реальное дифференцирующее звено (рис. 5)
Уравнения в пространстве состояний для дифференцирующего звена:
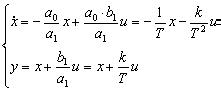 . (18)
. (18)
Передаточная функция дифференцирующего звена:
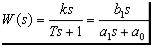 . (19)
. (19)
обновление от 16.02.2004
|
|
|
ЧДТУ 2004 |
112 |
|
|
|
|
Методические указания к курсу лабораторных работ по дисциплине “Основы ТАУ”
направление 6.091500 “Компьютерная инженерия”
Рис. 5. Принципиальная схема и структурная схема дифференцирующего звена.
Идеальное интегрирующее звено (рис. 6).
Уравнения в пространстве состояний для интегрирующего звена
 . (20)
. (20)
Передаточная функция интегрирующего звена
 . (21)
. (21)
Рис. 6. Структурная схема идеального интегрирующего звена Если в интегрирующем звене k = 1, то такое звено называют чисто интегрирующим.
Идеальное усилительное звено (рис. 7).
обновление от 16.02.2004
|
|
|
ЧДТУ 2004 |
113 |
|
|
|
|