


Методические указания к курсу лабораторных работ по дисциплине “Основы ТАУ”
направление 6.091500 “Компьютерная инженерия”
обозначаются {S1B ,B S2B ,B ..., SnB }B и очень важны при анализе системы на устойчивость.
Способов получения такой важнейшей характеристики как передаточная функция известно много [1, 2, 3, 4, 5]. Некоторые из них применяются в этом пособии.
Передаточная функция полностью характеризует динамические, а также статические свойства системы. Зная передаточную функцию системы и вид воздействия, можно определить переходный процесс на выходе системы.
Передаточные функции устойчивых динамических систем обладают следующими основными свойствами:
1)передаточная функция W(s) представляет собой дробно рациональную функцию вида (1), причем в реальной системе порядок т числителя не превышает порядок n знаменателя;
2)все коэффициенты b0B ,B b1B ,B ,.., bmB -1},B bmB ,B a0B ,B a1B ,B .,,, аnB -1,B аnB B передаточной функции вещественны. Это следует из того, что они представляют собой функции параметров системы, т.е. могут быть только вещественными;
3)невещественные нули и полюсы передаточной функции могут быть лишь комплексно-сопряженными;
4)все полюсы {S1B B,S2B ,B ..., SnB B} передаточной функции W(s) расположены в левой полуплоскости комплексной плоскости, что является условием устойчивости системы;
5)при s = jw передаточная функция (1) преобразуется в амплитудно-фазовую частотную характеристику системы, а при S = 0 преобразуется в передаточный коэффициент (для позиционных звеньев см. раздел "типовые звенья").
3.Структурные схемы
Для наглядного представления сложной системы как совокупности элементов и связей между ними используются структурные схемы. Структурная схема показывает строение автоматической системы, наличие внешних воздействий и точки их приложения, пути распространения воздействий и выходную величину. Условные знаки наносимые на структурную схему приведены на рис.1. Динамическое или статическое звено изображается прямоугольником, в котором указывается передаточная функция звена, или ее математическое выражение. Воздействия на систему и воздействия звеньев друг на друга (сигналы) изображаются стрелками. Около каждой стрелки указывается, какую физическую величину или обобщенную координату системы она изображает. На динамическое звено может воздействовать лишь одна входная величина, поэтому используются знаки суммирования и сравнения сигналов. Суммироваться и сравниваться могут лишь сигналы одной и той же физической природы. В каждом динамическом звене воздействие передается только от входа звена к его выходу.
обновление от 16.02.2004
|
|
|
ЧДТУ 2004 |
104 |
|
|
|
|

Методические указания к курсу лабораторных работ по дисциплине “Основы ТАУ”
направление 6.091500 “Компьютерная инженерия”
По структурной схеме можно составить систему уравнений относительно изображений (Рис. 1.в) всех переменных (обобщенных координат) или ее передаточные функции. Структурная схема может быть составлена по уравнению системы в пространстве состояний или по дифференциальным уравнениям системы.
При составлении структурной схемы удобно начинать с изображения задающего воздействия и располагать динамические звенья, составляющие прямую цепь системы, слева направо до регулируемой величины. Тогда основная обратная связь и местные обратные связи будут направлены справа налево.
Рис. 1. Условные знаки структурных схем: а) — входная величина (воздействие, сигнал); б) - выходная величина (воздействие сигнал; в) - динамическое звено (его изображение и передаточная функция); г) - разветвление сигнала; д) - суммирование сигналов; е) - сравнение двух сигналов; ж) - изменение знака сигнала.
Cтруктурные схемы разделяются на одноконтурные (рис.3), имеющие только одну основную обратную связь, и многоконтурные, имеющие кроме основной еще и местные обратные связи (рис.9, 10).
4. Преобразования структурных схем
Различные способы преобразования структурных схем облегчают определение передаточных функций сложных систем автоматического регулирования и дают возможность привести многоконтурную систему к эквивалентной ей одноконтурной схеме.
Преобразование структурной схемы должно осуществляться на основании правил. Правила преобразования структурных схем можно найти в справочной литературе [2], некоторые из них приведены в табл. 1.
Прежде всего каждое имеющееся в схеме типовое соединение звеньев (последовательное, параллельное и встречно-параллельное) следует заменить
обновление от 16.02.2004
|
|
|
ЧДТУ 2004 |
105 |
|
|
|
|

Методические указания к курсу лабораторных работ по дисциплине “Основы ТАУ”
направление 6.091500 “Компьютерная инженерия”
эквивалентным звеном. Затем целесообразно выполнить перенос точек разветвления и сумматоров, чтобы в преобразованной таким образом схеме образовались новые типовые соединения звеньев. Эти соединения опять должны быть заменены эквивалентными звеньями, затем вновь может потребоваться перенос точек разветвления и сумматоров и другие преобразования, приведенные ниже. Для предупреждения ошибок следует вычерчивать структурную схему после каждого этапа преобразований и указывать на ней значения или символы вводимых эквивалентных звеньев.
Таблица 1. Правила структурных преобразований.
Преобразование |
Структурная схема |
||
исходная |
Эквивалентная |
||
|
|||
Свертывание
последовательного
соединения
Свертывание параллельного соединения
Свертывание встречнопараллельного соединения
Перенос точки разветвления через звено
Перенос сумматора через звено
Перестановка точек разветвления
Перестановка сумматоров
обновление от 16.02.2004
|
|
|
ЧДТУ 2004 |
106 |
|
|
|
|
Методические указания к курсу лабораторных работ по дисциплине “Основы ТАУ”
направление 6.091500 “Компьютерная инженерия”
Перенос точки разветвления через сумматор
 Перенос звена через звено
Перенос звена через звено 
Перенос прямой связи через звено
5. Метод пространства состояний. Определение управляемости и наблюдаемости
Метод пространства состояний (метод переменных состояния) основан на понятии "состояние системы". Состояние динамической системы описывается совокупностью физических переменных xiB (t),B ..., xnB B(t), характеризующих поведение системы в будущем при условии, если известно состояние в исходный момент времени и приложенные к системе воздействия.
В общем случае нелинейной системы, описание в переменных состояния имеет вид
 . (6)
. (6)
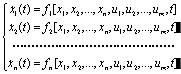
Если функции f1B ,B f2B B, ..., fnB B линейны относительно переменных x1B ,B x2B B, ..., xnB ,B u1B ,B u2B ,B ..., unB B и не зависят от времени t, то их можно привести к виду
 . (7)
. (7)
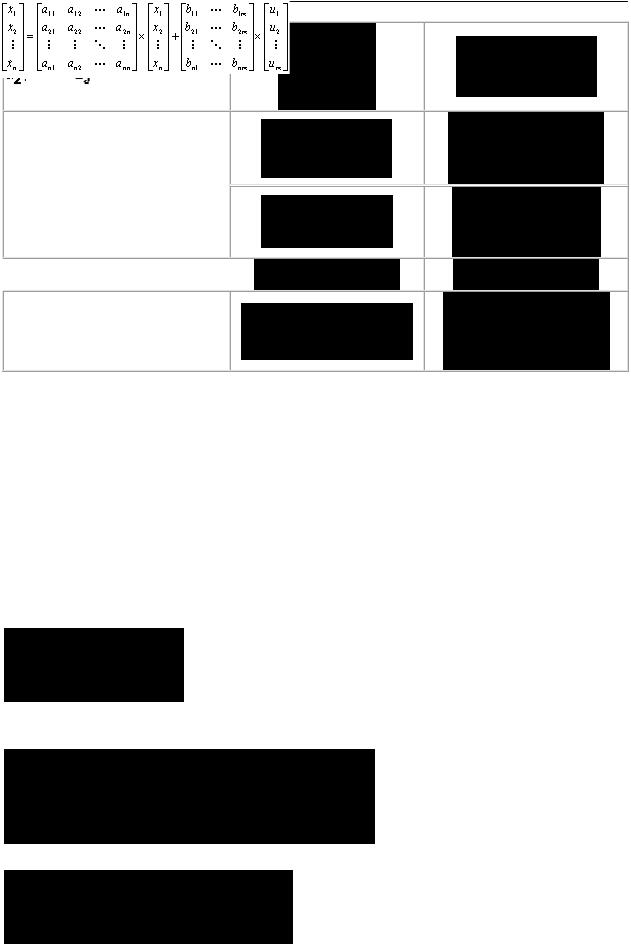
В матричной форме выражение (7) имеет вид
. (8)
обновление от 16.02.2004
|
|
|
ЧДТУ 2004 |
107 |
|
|
|
|
Методические указания к курсу лабораторных работ по дисциплине “Основы ТАУ”
направление 6.091500 “Компьютерная инженерия”
Такое выражение называется уравнением динамики для многомерной системы (u > 1), а в более компактном виде оно записывается через матричные операторы
 . (8a)
. (8a)
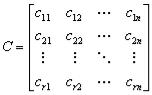
где  и
и  вектор-столбцы содержащие все переменные состояния и входные сигналы соответственно;
вектор-столбцы содержащие все переменные состояния и входные сигналы соответственно;
A - матрица динамики (состояния) объекта или системы размерностью n x n , (n - размерность вектора x);
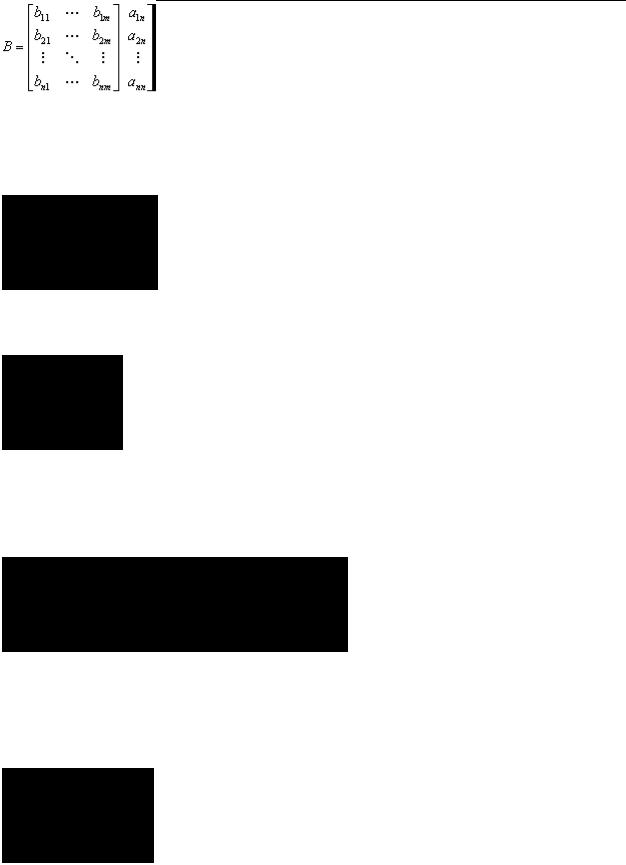
В — матрица управления (входа) размерностью n x m, (m — размерность вектора и), в случае одномерных систем матрица управления - векторстолбец;
Для полного описания системы в пространстве состояний к уравнениям динамики (8) или (8 а) необходимо добавить уравнения, устанавливающие связи между переменными состояния xB1,B ..., xпB B и выходными переменными yB1,B
...,yrB B между входными u1B ,B ..., umB B сигналами и выходными переменнымиy1B ,B ...,yrB B. Эта связь выражается в виде системы линейных алгебраических уравнений:
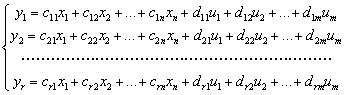 ; (9)
; (9)
или в векторно-матричной форме, называемой уравнением выхода
 , (9a)
, (9a)
где - матрица-столбец выходных сигналов системы;
- матрица-столбец выходных сигналов системы;
C - матрица выхода размерностью r x n, (r - размерность вектора y), в случае одномерных систем матрица выхода - вектор строка;
 ;
;
D - матрица обхода (компенсации или усиления по входу), связывающая между собой входные и выходные сигналы. В реальных системах чаще всего такая связь отсутствует. Размерность матрицы обхода r x m. Для одномерных систем размерность матрицы обхода (1 x 1).
обновление от 16.02.2004
|
|
|
ЧДТУ 2004 |
108 |
|
|
|
|
Методические указания к курсу лабораторных работ по дисциплине “Основы ТАУ”
направление 6.091500 “Компьютерная инженерия”
Для одномерных систем описание в пространстве состояний выглядит следующим образом
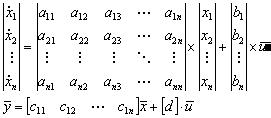 . (10)
. (10)
Таким образом, описание САУ в пространстве состояний выглядит как система двух уравнений в векторно матричной стандартной форме Коши
 . (11)
. (11)
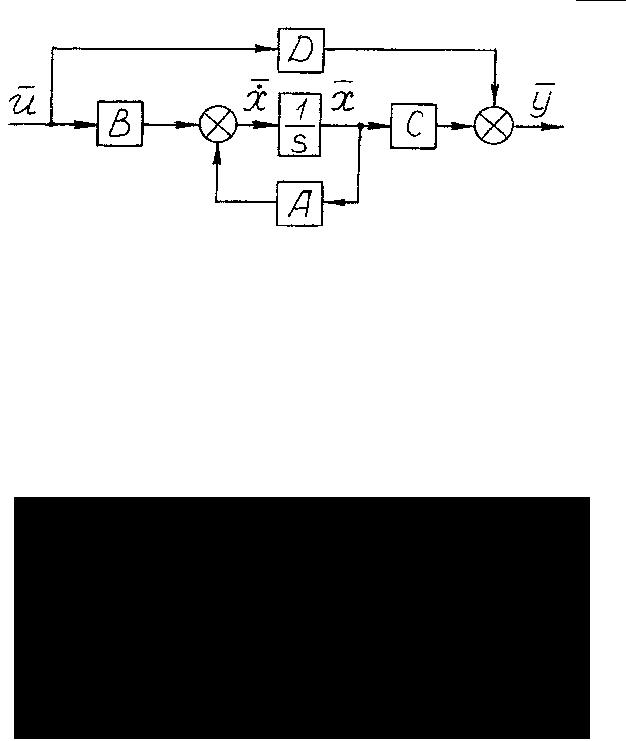
Выражению (11) соответствует условная структурная схема, изображенная на рис. 2.
Рис. 2. Условная структурная схема многомерной САУ описанной уравнениями в пространстве состояний.
Описание системы управления в пространстве состояний удобно тем, что позволяет проводить анализ САУ на такие важные свойства как управляемость и наблюдаемость.
обновление от 16.02.2004
|
|
|
ЧДТУ 2004 |
109 |
|
|
|
|