

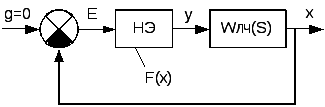
3.2 Устойчивость нелинейных асу
Абсолютной устойчивостью называется устойчивость системы при любых начальных отклонениях для любой формы нелинейной характеристики, принадлежащей к одному из определенных классов.
.Частотный критерий абсолютной устойчивости нелинейных систем В.М. Попова.
Данный критерий дает дост. условия абсолютной устойчивости нелинейной системы по виду частот. характеристики линейной части системы.
Нелинейность лежит внутри [0, kmax]
0<F(x)<kmaxX
![]()
Состояние равновесия
нелинейной системы будет абсолютно
устойчивым, если нелинейная характеристика
находится в секторе [0,kmax]
и существует такое действительное число
h,
что при всех частотах w≥0
выполняется
![]()

Нелинейность лежит внутри [0, kmax]
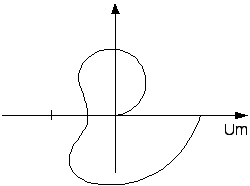
Графическая интерпретация.
1.Состояние равновесия нелинейной системы абсолютно устойчиво, если нелинейная характеристика F(x) находится внутри сектора [0,kmax] и можно привести через точку (-1/kmax,0) прямую таким образом, что она не пересечет модифицированную частотную характеристику вида:Wм(jw)=Uлч(w)+jwVлч(w)


2. [kmin,kmax]
kminX<F(x)<kmaxX

Геометрическая интерпретация. Состояние равновесия нелинейной системы абсолютно устойчиво, если через точки -1/kmin, -1/kmaxможно провести параболу таким образом, чтобы она не пересекала модифицированную АФХ.

4.1 Общие сведения
4.2 Оценка устойчивости импульсных АСУ
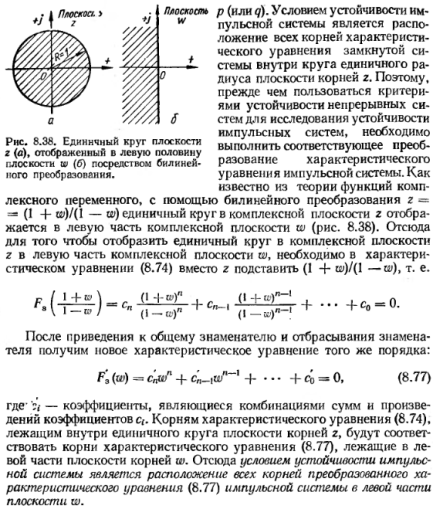


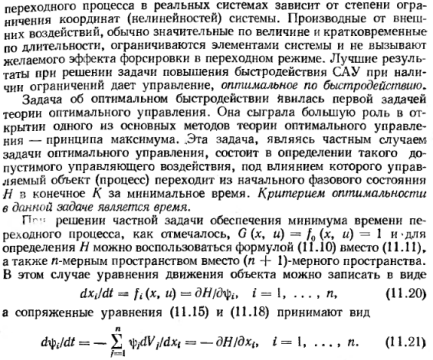
5.1 Общие сведения об оптимальном управлении и задачи синтеза оптимальных систем

5.2 Системы, оптимальные по быстродействию
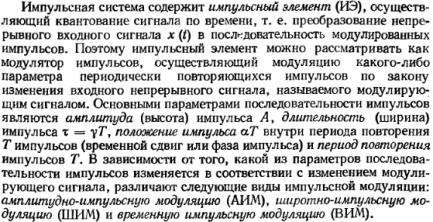
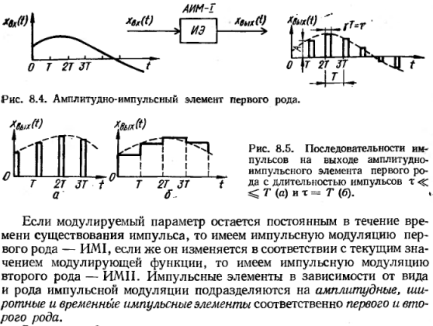
2.5
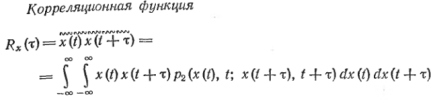
Линейные АСУ при случайных воздействиях

К важным характеристикам стационарных случайных процессов относятся математические ожидания, корреляционные функции, спектральные плотности.



6.1 Измерительные
Датчик тока
Датчик тока (измерительный трансформатор тока) с фильтром, как элемент САУ, описывается дифференциальным уравнением вида:
|
|
(2) |
 ,
,где
![]() –
передаточный коэффициент датчика тока;
–
передаточный коэффициент датчика тока;
![]() –номинальный
ток тиристорного преобразователя;
–номинальный
ток тиристорного преобразователя;
![]() –постоянная
времени фильтра в обратной связи по
току.
–постоянная
времени фильтра в обратной связи по
току.
При
изменении тока двигателя
![]() изменяется
напряжение на выходе
изменяется
напряжение на выходе
![]() ,
тогда уравнение (2) в приращениях примет
вид:
,
тогда уравнение (2) в приращениях примет
вид:
![]() .
.
Это уравнение в операторной форме записи представляется как:
![]() .
.
Тогда передаточная функция датчика тока с фильтром примет вид:
![]() .
.
Для
практических расчетов можно пренебречь
постоянной времени фильтра (![]() ,
тогда передаточная функция датчика
тока примет вид безинерционного звена:
,
тогда передаточная функция датчика
тока примет вид безинерционного звена:
 .
.
Датчики скорости
Наиболее широко применяемым в системах управления технологическим оборудованием датчиком скорости является тахогенератор, на выходе которого включается дополнительный фильтр. Эти элементы САУ, описываются следующим дифференциальным уравнением:
|
|
(3) |
 ,
,где
![]() –
коэффициент обратной связи по скорости;
–
коэффициент обратной связи по скорости;
![]() –постоянная
времени фильтра в обратной связи по
скорости.
–постоянная
времени фильтра в обратной связи по
скорости.
Тахогенератор
является безинерционным звеном
![]() ,
а инерционность вносится за счет фильтра
(
,
а инерционность вносится за счет фильтра
(![]() ).
При изменении скорости тахогенератора
на
).
При изменении скорости тахогенератора
на
![]() изменится
и напряжение на выходе —
изменится
и напряжение на выходе —
![]() .
Тогда уравнение (3) в приращениях примет
вид:
.
Тогда уравнение (3) в приращениях примет
вид:
 ,
,
Переходя к операторной форме записи, получаем:
![]() ,
,
Преобразовывая это уравнение, получаем передаточную функцию обратной связи по скорости:
![]() .
.