

1.4 Принципы построения асу и их классификация
. Принципы построения САУ.
САУ несмотря на все разнообразие по конструкции, принципу действия существуют ограничения количество способов их построения. 1)разомкнутая без рефлексная система управления.

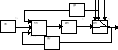
ЗУ– задающее устройство;Uз– задающее воздействие;ИУ– исполняющее устройство;U– управляющее воздействие;f– возмущение;Y– выходной сигнал. ЗУ- руководствуясь какими либо внутренними сигналами (часы) измеряетUз. Через УУ и ИУ это изменение передается на объект управления вызывая изменения управляемой величиныY. Пример: управление стиральных машин.Дост-во:простота конструкции.Недостатки:при наличии возмущающейfвыходная величенаYбудет отклоняться от определ-го значения, но УУ ничего об этом не знает и никак на это не реагирует.2)Разомкнутая система управления по возмущениям или принцип Понсле.

Дf– датчик возмущения. Т.к причина отклонения выходной величиныYвозмущениеf, то его измеряем и в зависимости от его величины, формы формируем управляющее воздействие на объект, чтобы скомпенсировать влияние возмущения на объект.Дост-ва:высокое быстродействие, реагирует на причину.Недостатки:для полной и точной комплектации необходимо иметь точную математическую модель по каналам управления и каналам возмущения. Это дорого и даже эта модель с течением времени
становится не точной. Возмущений может быть несколько, все возмущения измерить дорого и сложно. В результате управляемая величина Yбудет отклоняться от заданного значения.3)замкнутая САУ по отклонению (принцип по отклонению ).

Е=Uз –Uос -> ошибка регулирования управления или отклонения. Здесь величина измеряется и сравнивается с заданным значением. В зависимости от величины и знака отклонения Е управляющее УУ через ИУ воздействует на ОУ стремлясь уменьшить величину отклонения.Дост-ва:универсальность, устройство управления реагирует на любые отклонения.Недостатки:противоречивость самого принципа. Для этого чтобы уменьшить отклонения надо его с начало допустить.4)Комбинированное САУ.
тр
Действие основного возмущения компенсируется управлением по разомкнутому принципу, а не точность компенсации и влияние неучтенных возмущений устраняется управлением по замкнутому контуру. 5)Адетивное САУ.

СС- система самонастройки.
1.5 Классификация элементов автоматических систем
Классификация систем автоматического управления.
!) По структуре САУ:а) разомкнутые, б) замкнутые, в) комбинированные. 2) По сложности структуры:а)одноконтурные (одна цепь ООС); б) многоконтурные; в) одномерные (если управл. одной переменной); г) многомерная; д) каскадное САУ; е) многоуровневые; ж) иерархические.3) По цепям управления:а)Uз=const, система автоматической стабилизации; б)Uз=varпеременная величина, но измеряется по заранее замкнутой системе т.е программное САУ; в)Uз =varно характер его изменения неизвестен т.е следящее САУ.4) По виду математического описания:I. а) линейные системы, б) нелинейные
системы. II. а) стационарные если коэфф-ты урав-ий постоянные величины, б) нестационарные системы если коэфф-ты урав-ий динамики системы яв-ся функциями времени.III. а) система сосредоточенными параметрами если описыв. обыкнов. диф. уравнениями, б) система с распределенными параметрами если описыв. диф. урав-ми в частных производных.IV. а) детерминированные системы, б) стохастические если коэфф. уравн-я яв-ся случайными фун-ми.5) По закону управления:I. Системы с типовыми линейными и не линейными регуляторами: пропорциональный, ПИ, ПИД, ПД, РП, РС;II. оптимальные системы это когда мы стремимся достичьminилиmaxнекоторого показателя,III. Адаптивные, самонастраивающиеся системы, в этом случае подстраивается к изменяющимся параметрам окружающей среды,IV. Экстремальные – когда система управления ищет экстремум на характеристиках управления,V. Сомообуч. и самоорганизующие системы.6) По виду действующих в системе сигналов:I. аналоговые, непрерывные системы, сигналы яв-ся непрерывными ф-ми,II. дискретные сигналы в системе квантованы по уровню,III. импульсные системы, сигналы в системе квантованы по времени,IV. цифровые, когда сигнал квантован и по уровню и по времени,V. смешанные, часть системы яв-ся аналоговой, часть непрерывной, а часть дискретной.Схемы:
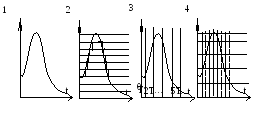
T– период квантования.