

7.3 Экстраполяция
Экстраполяция, экстраполирование (от экстра… и лат. polio — приглаживаю, выправляю, изменяю) — в математике — особый тип аппроксимации (приближения), при котором функция аппроксимируется не между заданными значениями, а вне заданного интервала.
Экстраполяция — приближённое определение значений функции f(x) в точкаx x, лежащиx вне отрезка [x0,xn], по её значениям в точкаx x0 < x1 < ... < xn
Наиболее распространённым методом экстраполяции является параболическая экстраполяция, при которой в качестве значения f(x) в точке x, берётся значение многочлена Pn(x) степени n, принимающего в n + 1 точке xn заданные значения yi = f(xi). Для параболической экстраполяции пользуются интерполяционными формулами.
Общее значение — распространение выводов, полученныx из наблюдения над одной частью явления, на другую его часть.
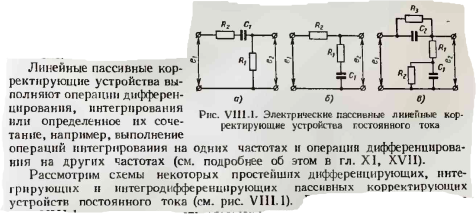
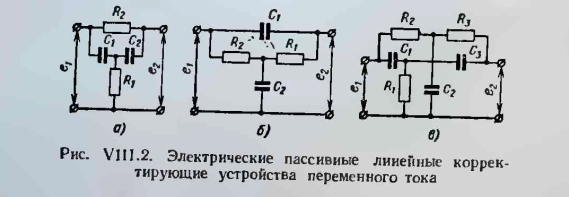
6.4 Корректирующие


![]()




![]()


![]()

7.1 Обработка сигналов с датчиков
Самым нижним уровнем является уровень датчиков и исполнительных механизмов, которые устанавливаются непосредственно на технологических объектах. Их деятельность заключается в получении параметров процесса, преобразовании их в соответствующий вид для дальнейшей передачи на более высокую ступень (функции датчиков), а также в приеме управляющих сигналов и в выполнении соответствующих действий.
Почти все технологические параметры, присутствующие в реальном технологическом объекте. имеют аналоговый или дискретный вид. Существует много датчиков, которые могут преобразовывать измеряемые величины только в аналоговый вид (напряжение, сопротивление, давление), а также много исполнительных механизмов, имеющих только аналоговые входные сигналы. Для того, чтобы связать между собой параметры, представленные в аналоговом и цифровом видах, в современной АСУТП используют устройства связи объектом. Модули УСО - это конструктивно законченные устройства, выполненные в виде модулей, устанавливаемых, как правило, в специализированные платы с клеммными соединителями или стандартный DIN-рельс. На УСО возлагаются следующие функции: 1) Нормализация аналогового сигнала, т.е. приведение границ шкалы первичного непрерывного сигнала к одному из стандартных диапазонов входных сигналов АЦП. 2) Предварительная низкочастотная фильтрация аналогового сигнала - ограничение полосы частот первичного непрерывного сигнала с целью снижения влияния на результат измерения помех различного происхождения. 3) Обеспечение гальванической изоляции между источниками сигнала и каналами системы. Помимо этих функций ряд УСО может выполнять более сложные функции за счет наличия в их составе АЦП, дискретного ввода-вывода, микропроцессора и интерфейсов передачи данных. По характеру обрабатываемого сигнала УСО можно разделить на аналоговые, дискретные и цифровые. Аналоговые УСО (аналого-цифровые преобразователи АЦП, цифро-аналоговые преобразователи ЦАП и др.) должны обладать большой точностью, линейностью и большим напряжением изоляции. Дискретные УСО обеспечивают опрос датчиков с релейным выходом, выключателей, контроля наличия напряжения в сети и т.д., а выходные дискретные УСО формируют сигналы для управления пускателями, двигателями и прочими устройствами. Дискретные УСО удовлетворяют тем же требованиям, что и аналоговые, но, кроме того, обладают минимальным временем переключения, а выходные могут обеспечивать коммутацию более высоких токов и напряжений. Среди модулей УСО существуют также устройства, работающие только с цифровой информацией. К ним относятся коммуникационные модули, предназначенные для сетевого взаимодействия. По направлению прохождения данных модули УСО можно разделить на три
типа: 1) устройства ввода, обеспечивающие передачу сигналов датчиков; 2) устройства вывода для формирования сигналов на исполнительные механизмы; 3) двунаправленные. В реальных системах модули УСО могут не присутствовать в виде самостоятельных устройств, а входить в состав датчиков (в этом случае датчики называют интеллектуальными) или промышленных компьютеров. Примером могут служить датчики, выдающие готовый цифровой сигнал. в этом случае граница между первичным преобразователем и УСО проходит где-то внутри датчика. С другой стороны, УСО могут быть выполнены в виде АЦП/ЦАП-плат, вставляемых в стандартные ISA или PCI слоты компьютера. В этом случае аналоговые сигналы могут быть введены прямо в компьютер, где и преобразуются в цифровой вид. Цифровые сигналыформируются из аналоговых операцией дискретизации – последовательными квантованными отсчетами (измерением) амплитудных значений сигнала через определенные интервалы времениt или любой другой независимой переменнойx. В принципе известны методы ЦОС для неравномерной дискретизации данных, однако области их применения достаточно специфичны и ограничены. Условия, при которых возможно полное восстановление аналогового сигнала по его цифровому эквиваленту с сохранение всей исходно содержавшейся в сигнале информации, выражаются теоремами Найквиста, Котельникова, Шеннона, сущность которых практически одинакова. Для дискретизации аналогового сигнала с полным сохранением информации в его цифровом эквиваленте максимальные частоты в аналоговом сигнале должны быть не менее чем вдвое меньше, чем частота дискретизации, то есть fmax(1/2)fd. Если это условие нарушается, в цифровом сигнале возникает эффект маскирования (подмены) действительных частот "кажущимися" более низкими частотами. Наглядным примером этого эффекта может служить иллюзия, довольно частая в кино – колесо автомобиля начинает вращаться против его движения, если между последовательными кадрами (аналог частоты дискретизации) колесо совершает более чем пол-оборота. При этом в цифровом сигнале вместо фактической регистрируется "кажущаяся" частота, а, следовательно, восстановление фактической частоты при восстановлении аналогового сигнала становится невозможным.
Преобразование сигнала в цифровую формувыполняется аналого-цифровыми преобразователями (АЦП). Как правило, они используют двоичную систему счисления с определенным числом разрядов в равномерной шкале. Увеличение числа разрядов повышает точность измерений и расширяет динамический диапазон измеряемых сигналов. Потерянная из-за недостатка разрядов АЦП информация невосстановима, и существуют лишь оценки возникающей погрешности «округления» отсчетов, например, через мощность шума, порождаемого ошибкой в последнем разряде АЦП. Для этого используется понятие отношения «сигнал/шум» - отношение мощности сигнала к мощности шума (в децибелах). Наиболее часто применяются 8-, 10-, 12-, 16-, 20- и 24-х разрядные АЦП. Каждый дополнительный разряд улучшает отношение сигнал/шум на 6 децибел. Однако увеличение количества разрядов снижает скорость дискретизации и увеличивает стоимость аппаратуры. Важным аспектом является также динамический диапазон, определяемый максимальным и минимальным значением сигнала.
Обработка цифровых сигналоввыполняется либо специальными процессорами, либо на универсальных ЭВМ и компьютерах по специальным программам. Наиболее просты для рассмотрения линейные системы. Линейными называются системы, для которых имеет место суперпозиция (отклик на сумму входных сигналов равен сумме откликов на эти сигналы по отдельности) и однородность или гомогенность (изменение амплитуды входного сигнала вызывает пропорциональное изменение выходного сигнала). Для реальных объектов свойства линейности могут выполняться приближенно и в определенном интервале входных сигналов.
Если входной сигнал x(t-t0) порождает однозначный выходной сигнал y(t-t0) при любом сдвиге t0, то систему называют инвариантной во времени. Ее свойства можно исследовать в любые произвольные моменты времени. Для описания линейной системы вводится специальный входной сигнал - единичный импульс (импульсная функция). В силу свойства суперпозиции и однородности любой входной сигнал можно представить в виде суммы таких импульсов, подаваемых в разные моменты времени и умноженных на соответствующие коэффициенты. Выходной сигнал системы в этом случае представляет собой сумму откликов на эти импульсы, умноженных на указанные коэффициенты. Отклик на единичный импульс называют импульсной характеристикой системы h(n). Соответственно, отклик на произвольный входной сигнал s(k) можно выразить сверткой g(k) = h(n)③s(k-n).
Если h(n)=0 при n<0, то систему называют каузальной (причинной). В такой системе реакция на входной сигнал появляется только после поступления сигнала на ее вход. Некаузальные системы реализовать физически невозможно. Если требуются физически реализовать свертку сигналов с двусторонними операторами (при дифференцировании, преобразовании Гильберта, и т.п.), то это выполняется с задержкой (сдвигом) входного сигнала минимум на длину левосторонней части оператора свертки.