

43. Функциональная схема автопилота. Датчики, сервопривод, механизм согласования.
Автопилот является одним из важнейших элементов любой САУ. Автопилоты различаются структурными особенностями, законами управления, формой сигналов-носителей информации, числом каналов управления и др. Функциональная схема одного из каналов автопилота приведена на рис. Чувствительный элемент в сочетании с устройством для снятия сигналов образует датчик сигналов. Набор необходимых датчиков первичной информации диктуется конкретной структурой разрабатываемой САУ. Характеристиками датчиков являются передаточные функции и статические погрешности. Очевидно, что статические погрешности датчиков должны быть меньше требуемых точностей процессов управления.
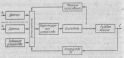
Исполнительными устройствами систем управления, преобразующими командные сигналы в механические перемещения аэродинамических органов управления, являются приводы. В авиации применяют приводы гидравлического и электрического принципа действия. Привод, главной задачей которого является преобразование электрического командного сигнала в механическое перемещение, называют сервоприводом. Механизм согласования служит для автоматической подготовки автопилота к включению его силовой части. Механизм согласования представляет собой следящую систему, которая находится в замкнутом состоянии, когда автопилот не включен.
44. Законы управления автопилотов.
Под
законом управления автопилота понимается
требуемая зависимость между изменением
выходной и входных координат. При этом
под выходной понимается координата,
характеризующая положение исполнительного
органа
 ,
под входными – координаты, сигналы по
которым вводятся в автопилот с помощью
соответствующих датчиков
,
под входными – координаты, сигналы по
которым вводятся в автопилот с помощью
соответствующих датчиков и задатчика
и задатчика .
Тогда для закона управления можно
написать зависимость
.
Тогда для закона управления можно
написать зависимость , где
, где – передаточные функции корректирующих
устройств по регулируемым координатам;
– передаточные функции корректирующих
устройств по регулируемым координатам; – передаточная функция корректирующего
устройства по сигналу задатчика. В
зависимости от типа применяемой в
сервоприводе автопилота обратной связи
различают следующие законы управления:–
для автопилота с ЖОС
– передаточная функция корректирующего
устройства по сигналу задатчика. В
зависимости от типа применяемой в
сервоприводе автопилота обратной связи
различают следующие законы управления:–
для автопилота с ЖОС ,–
для автопилота с СОС
,–
для автопилота с СОС ,
– для автопилота с ИОС
,
– для автопилота с ИОС Автопилоты по виду закона управления
классифицируют на статические, в которых
каждому положению исполнительного
органа соответствует определенное
значение регулируемого параметра, и
астатические, в которых скорость
исполнительного органа однозначно
связана с регулируемым параметром.
Автопилоты по виду закона управления
классифицируют на статические, в которых
каждому положению исполнительного
органа соответствует определенное
значение регулируемого параметра, и
астатические, в которых скорость
исполнительного органа однозначно
связана с регулируемым параметром.
46. Требования к системам автоматического управления ла
САУ ЛА обеспечивает стабилизацию и управление угловыми движениями ЦМ ЛА. САУ полетом должны: 1) улучшать устойчивость и управляемость ЛА на всех режимах полета, как при ручном полуавтоматическом, так и автоматическом управлении, 2) обеспечивать управление угловыми движениями ЛА и движениями ЦМ, наведение на цели, 3) быть пригодными для включения в работу в любом положении ЛА и выводить ЛА в горизонтальный полет при допустимых перегрузках, 4) иметь связь СУ при посадке и взлёте, 5) для стабилизации скорости при сверхзвуковых полетах и на посадочных режимах включать канал управления скоростью с подачей сигналов на РВ и на тягу двигателей, 6) предусматривать устройства для ограничения предельных режимов по перегрузкам углам крена, угловым скоростям, 7) предусматривать коррекцию передаточных чисел по режимам полета, а при широком диапазоне изменение параметров ЛА, система управления должна быть самонастраивающейся (адаптивной), 8) иметь связь СУ строем самолетов, 9) обеспечивать выбор и поддержание оптимальных режимов полета( миним. Время, макс. Дальность, мин. Расход топлива, оптимальная траектория, автоматическое маневрирование и т.д.).