

Пути построения оптимальных систем.
1. В этом случае САУ оптимизируют на основе подбора и использования существующих методов анализа систем. В данном случае рассматриваются различные варианты систем с различными параметрами и законами регулирования. Затем расчеты сравниваются, и выбирается вариант, для которого принятый критерий имеет максимальное или минимальное значение.
2. Заключается в непосредственном определении оптимальной системы. Здесь существует 2 способа:
- задается структура системы и требуется найти оптимальное значение ее параметров, которые обеспечивают экстремумы выбранного критерия.
- система считается полностью неизвестной и требуется определить ее характеристики, обеспечивающие достижение экстремума критерия, идеального из всех числовых значений параметров.
Чаще всего значение критерия оптимизации определяется не текущим состоянием объекта, а его поведение в течение всего процесса управления. Поэтому критерий оптимальности можно представить в виде:
 ,
,
где:
В
общем случае
![]() - есть вектора:
- есть вектора:
![]() -
время переходного процесса системы.
-
время переходного процесса системы.
При
решении задач оптимизации на величину
выходного параметра
![]() и управляющего воздействия
и управляющего воздействия![]() могут накладываться некоторые ограничения,
которые можно записать в виде следующего
неравенства:
могут накладываться некоторые ограничения,
которые можно записать в виде следующего
неравенства:
В
предельном случае эти ограничения могут
быть сведены к ограничениям, накладываемым
на отдельные выходные величины. При
решении задач оптимизации объект
управления можно описать с помощью
некоторого оператора
![]() :
:
![]() -
выходная величина объекта.
-
выходная величина объекта.
Чаще всего описание объекта задается с помощью системы дифференциальных уравнений.
Для решения уравнений необходимо задать граничные условия при t=0 и конечное состояние объекта управления G. В этом случае задача синтеза будет иметь следующий вид.
По заданному систематическому описанию объекта (в виде дифференциальных уравнений), граничными условиями (при t=0), ограничением вида [2]; внешнего воздействия Х и критерия оптимизации [1], а также устройству управления, обеспечивающего такое оптимальное управление при котором достигается цель управления при максимальном либо минимальном значении параметра оптимизации и выполнении всех ограничений.
Методы решения задач оптимизации. Принцип максимума Понтрягина.
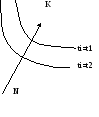
Перевести за минимальное время изображающую точку из некоторого начального положения N в определенную конечную точку К.
Каждой точке фазового пространства окружающего точку К, соответствует оптимальная траектория и соответствующее ей минимальное время перехода в эту точку. Вокруг точки К можно построить поверхности, являющиеся геометрическим местом точек с одинаковым минимальным временем ti перехода в эту точку.
Эти
поверхности называются изохронами.
Оптимальная по быстродействию траектория
из точки N
в точку К должна быть максимально близка
к нормалям насколько это позволяют
ограничения, наложенные на величины
управления. Движения вдоль изохрон
увеличивает время процесса, так как
приводит к дополнительным затратам
времени на движение не уменьшающее
расстояние до конечной точки, то есть
на всей траектории произведение вектора
скорости изменения выходной величины
![]() на вектор, обратный градиенту времени
перехода в конечную точку
на вектор, обратный градиенту времени
перехода в конечную точку![]() должен быть максимальным, то есть должно
выполняться условие равенства:
должен быть максимальным, то есть должно
выполняться условие равенства:
![]()
Для
любого критерия оптимальности поверхности
постоянного значения будут называться
изоповерхностями и будет выполняться
условие [1]. При практическом определении
оптимального управления и оптимальной
траектории изоповерхности не определяют,
а находят вектора
![]() с помощью сопряженных уравнений:
с помощью сопряженных уравнений:
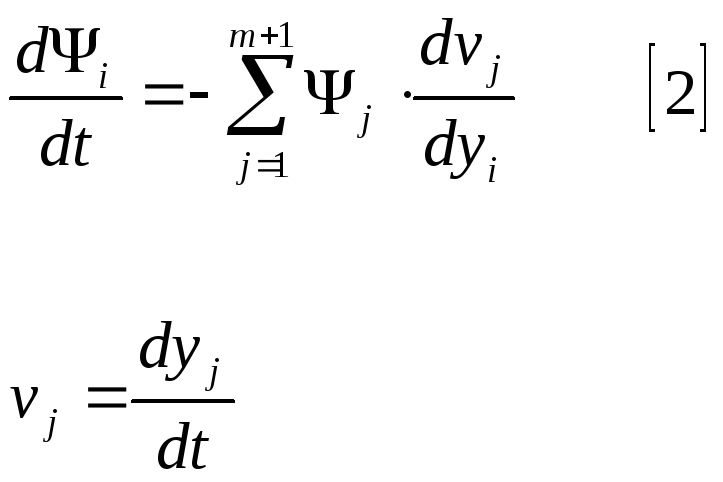
Обозначим сумму произведений:
![]()
Определим производную:
![]()
Подставим полученное значение в [2].
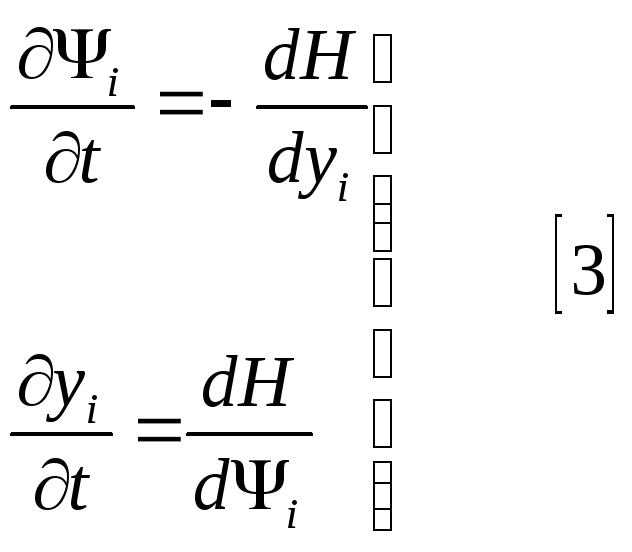
Полученное
выражение называется уравнениями
Гамильтона, а Н - гамильтонианом. В итоге
задача сводится к следующему: определить
закон управления
![]() , дающее в результате совместного решения
уравнения объекта и сопряженных уравнений
такую траекториюI(t),
для которой гамильтониан Н во всех ее
максимумах будет иметь максимальное
значение, то есть будет выполняться
равенство:
, дающее в результате совместного решения
уравнения объекта и сопряженных уравнений
такую траекториюI(t),
для которой гамильтониан Н во всех ее
максимумах будет иметь максимальное
значение, то есть будет выполняться
равенство:
![]()
Однако
в этом случае необходимо начальное
условие
![]() и задавая для него произвольные значения,
находим траекторию, которая близка к
оптимальной, и последовательно приближая
ее, получаем оптимальную траекторию.
и задавая для него произвольные значения,
находим траекторию, которая близка к
оптимальной, и последовательно приближая
ее, получаем оптимальную траекторию.