

7.6. Метод наискорейшего спуска
С целью уменьшения общего количества итераций применяют градиентный метод с переменным шагом (дроблением шага). Этот метод называют методом наискорейшего спуска. В градиентном методе наискорейшего спуска первоначальный шаг выбирается достаточно большим, а затем его величина уменьшается в соответствии с определенным правилом, например, методом деления отрезка пополам. Величина шага на каждой итерации связана с поведением функции в окрестности очередной точки последовательности.
В методе наискорейшего спуска движение предполагается по градиенту с оптимальной, т. е. по возможности наибольшей величиной шага на каждой итерации, исходя из условия экстремума целевой функции в направлении градиента
![]() .
(7.21)
.
(7.21)
На
каждой итерации необходимо решать
задачу оптимизации целевой функции как
одномерной функции величины шага
![]()
![]() .
(7.22)
.
(7.22)
Значение
h,
при котором достигается минимум функции
![]() ,
принимается за величину оптимального
шага
,
принимается за величину оптимального
шага
![]() .
При поиске минимума целевой функции в
формулах (7.9) и (7.22) ставится минус и плюс
- в случае нахождения максимума функции.
.
При поиске минимума целевой функции в
формулах (7.9) и (7.22) ставится минус и плюс
- в случае нахождения максимума функции.
Решение
задачи оптимизации функции
![]() может выполняться любыми методами.
может выполняться любыми методами.
Если
функция
![]() дифференцируема, то искомым значением
дифференцируема, то искомым значением
![]() будет корень уравнения
будет корень уравнения
![]() .
.
Геометрический смысл метода наискорейшего спуска:
Рассмотрим
 ,
,
и
![]() ,
,
то
![]() .
.
Следовательно,
![]() .
(7.23)
.
(7.23)
Так
как
![]() ,
то градиенты целевой функции в двух
соседних точках итерационной
последовательности взаимно ортогональны.
Поэтому траектория поиска представляет
последовательность ортогональных друг
к другу отрезков прямых (Рис. 7.5).
,
то градиенты целевой функции в двух
соседних точках итерационной
последовательности взаимно ортогональны.
Поэтому траектория поиска представляет
последовательность ортогональных друг
к другу отрезков прямых (Рис. 7.5).
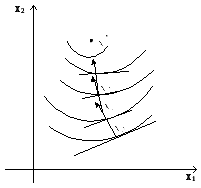
Рис.7.5. Траектория поиска экстремума
Пример.
Найти максимум функции
![]() в
условиях предыдущего примера методом
наискорейшего спуска.
в
условиях предыдущего примера методом
наискорейшего спуска.
Результаты вычислений представлены в расчетной таблице 7.2.
Таблица 7.2
Расчетная таблица
|
|
|
|
|
|
|
|
|
|
|
к |
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
2 |
12 |
12,17 |
3+148h-292 |
148-584h=0 |
0,25 |
|
1 |
0,5 |
3,0 |
1 |
0 |
1,0 |
21,75+h- |
1-2h=0 |
0,5 |
|
2 |
1,0 |
3,0 |
0 |
0 |
0 |
|
|
- |
Уже на второй итерации получен результат. Пояснение для первой строки расчетной таблицы 7.2:
1-й
шаг: Начальная точка
![]() .
Для целевой функции
.
Для целевой функции
![]() =3+2
=3+2![]() находим
находим
![]() ;
;
 ,17;
,17;
и
 ;
;
 .
.
Подставим
полученные значения в уравнение целевой
функции
![]() .
Находим
.
Находим
![]() и
и
![]() .
.
![]() и т.д.
и т.д.
Модификация метода скорейшего спуска
Решается
задача минимизации функции
![]() .
.
Задаем
координаты начальной точки
![]() и находим градиент (используется
разностное приближение производной).
и находим градиент (используется
разностное приближение производной).
Выбираем шаг h, затем переходим в направлении антиградиента в новую точку, выбираем шаг h1 (используется метод деления отрезка пополам).
Чтобы
избежать зацикливания программы, в нее
вставлен счетчик циклов Т, когда Т >
![]() ,
счет оканчивается (высвечивается “
Время ”); счет также заканчивается,
когда сумма абсолютных величин производных
меньше заданного положительного числа
,
счет оканчивается (высвечивается “
Время ”); счет также заканчивается,
когда сумма абсолютных величин производных
меньше заданного положительного числа
![]() .
.![]() .
.