

7.3. Градиентные методы
Пусть
задача нелинейного программирования
состоит в минимизации функции
![]() ,
т.е. в отыскании вектора
,
т.е. в отыскании вектора
![]() ,
который доставляет этой функции
глобальный минимум.
,
который доставляет этой функции
глобальный минимум.
Функция
![]() называется целевой функцией или функцией
цели.
называется целевой функцией или функцией
цели.
Если
функция
![]() дифференцируема в точке
дифференцируема в точке
![]() ,
то градиентом
,
то градиентом
![]() в точке
в точке
![]() называется n-мерный
вектор
называется n-мерный
вектор
![]() .
.
Градиент
в каждой точке
![]() ,
в которой он существует, направлен по
нормали к линии уровня поверхности
,
в которой он существует, направлен по
нормали к линии уровня поверхности
![]() и показывает направление наискорейшего
возрастания функции в данной точке (рис
7.2)
и показывает направление наискорейшего
возрастания функции в данной точке (рис
7.2)
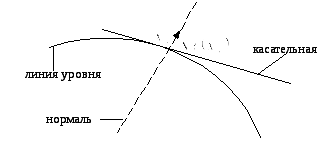
Рис. 7.2. Свойства вектора градиента
Если
градиент отличен от нуля, то он указывает
направление наибыстрейшего роста
значения функции
![]() .
.
Вектор
«-![]() »,
противоположный градиенту, называется
антиградиентом и указывает направление
наискорейшего убывания функции
»,
противоположный градиенту, называется
антиградиентом и указывает направление
наискорейшего убывания функции
![]() .
.
Для
выпуклой функции необходимым и достаточным
условием оптимальности точки
![]() является равенство нулю градиента
функции в этой точке, т. е.
является равенство нулю градиента
функции в этой точке, т. е.
![]() .
.
Алгоритм градиентного метода
Идея
градиентного метода: если заранее
известно, что функция
![]() имеет
в допустимой области единственный
экстремум, то поиск точки, в которой
он достигается, целесообразнее проводить
следующим образом. В допустимой области
взять производную функции в точке
имеет
в допустимой области единственный
экстремум, то поиск точки, в которой
он достигается, целесообразнее проводить
следующим образом. В допустимой области
взять производную функции в точке
![]() и с помощью градиента (антиградиента)
определить направление, в котором
целевая функция
и с помощью градиента (антиградиента)
определить направление, в котором
целевая функция
![]() возрастает
(убывает) с наибольшей скоростью.
возрастает
(убывает) с наибольшей скоростью.
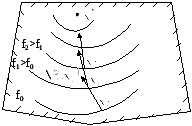
Рис.7.3. Поиск экстремума градиентным методом
Сделав
наибольший шаг в найденном направлении,
перейти в новую точку
![]() .
Потом снова определить наилучшее
направление для перехода в очередную
точку
.
Потом снова определить наилучшее
направление для перехода в очередную
точку
![]() и т. д., иначе говоря, надо построить
последовательность точек
и т. д., иначе говоря, надо построить
последовательность точек
![]() так, чтобы она сходилась в точке экстремума
так, чтобы она сходилась в точке экстремума
![]() ,
т.е. для точек последовательности
выполнялись условия
,
т.е. для точек последовательности
выполнялись условия
![]()
![]()
![]()
Величина
шага из точки
![]() по направлению
градиента
по направлению
градиента
![]() (антиградиента -
(антиградиента -![]() )
определяется значением параметра
)
определяется значением параметра
![]() в уравнении прямой
в уравнении прямой
![]() ,
,
![]() (7.9)
(7.9)
Методы
поиска экстремума, основанные на
построении последовательности точек
![]() ,
называют шаговыми или итерационными.
Эти методы различаются способом выбора
направления движения
,
называют шаговыми или итерационными.
Эти методы различаются способом выбора
направления движения
![]() и способом выбора шага
и способом выбора шага
![]() ,
от этого зависит сходимость методов.
,
от этого зависит сходимость методов.
Большое
значение имеет также выбор начальной
точки
![]() .
.
В
качестве критериев прекращения
итерационного процесса, свидетельствующих
о достижении достаточной близости
последней точки последовательности
![]() к точке экстремума
к точке экстремума
![]() ,
могут использоваться или модуль градиента
,
могут использоваться или модуль градиента
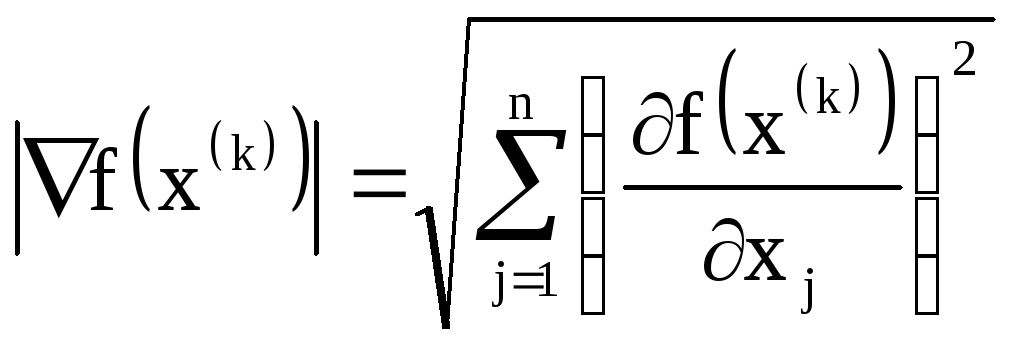 ,
(7.10)
,
(7.10)
или модуль разности оптимизируемой функции в двух соседних точках последовательности.
Значения
критериев сравниваются с достаточно
малыми положительными числами
![]() ,
соответствующими требуемой точности
решения.
,
соответствующими требуемой точности
решения.
Признаком прекращения итерационного процесса служит выполнение неравенства
![]() .
(7.11)
.
(7.11)
Используя
градиентные методы, можно найти решение
любой задачи нелинейного программирования.
Однако в общем случае применение этих
методов позволяет найти точку локального
экстремума. Поэтому более целесообразно
использовать градиентные методы для
нахождения решения задач выпуклого
программирования, в которых всякий
экстремум является одновременно и
глобальным. Процесс нахождения решения
задачи с помощью градиентных методов
состоит в том, что, начиная с некоторой
точки
![]() ,
осуществляется последовательный переход
к некоторым другим точкам до тех пор,
пока не выявляется приемлемое решение
исходной задачи. При этом градиентные
методы могут быть подразделены на две
группы.
,
осуществляется последовательный переход
к некоторым другим точкам до тех пор,
пока не выявляется приемлемое решение
исходной задачи. При этом градиентные
методы могут быть подразделены на две
группы.
К первой группе относятся методы, при использовании которых исследуемые точки не выходят за пределы области допустимых решений задачи. Наиболее распространенным из таких методов является метод Франка-Вулфа.
Ко второй группе относятся методы, при использовании которых исследуемые точки могут, как принадлежать, так и не принадлежать области допустимых решений. Однако в результате реализации итерационного процесса находится точка области допустимых решений, определяющая приемлемое решение. Из таких методов наиболее часто используется метод штрафных функций или метод Эрроу-Гурвица.
Остановимся более подробно на методах Франка-Вулфа, штрафных функций и Эрроу-Гурвица.