

2.3.2. Графоаналитический метод кинематического анализа рычажных механизмов
Графоаналитический метод определения кинематических параметров механизмов сводится к построению планов их положений, скоростей и ускорений.
План положений механизмов – это графическое изображение взаимного расположения звеньев, соответствующее выбранному расчетному положению начального звена.
План скоростей механизма – это чертеж, на котором изображены в виде отрезков векторы, равные по модулю и по направлению скоростям различных точек звеньев механизма в данный момент.
План ускорений – это чертеж, на котором изображены в виде отрезков векторы, равные по модулю и направлению ускорениям различных точек звеньев механизм в данный момент.
Кривошипно-ползунный
механизм. На
рис. 2.5, а
показан план положений механизма для
значения обобщенной координаты
![]() Для построения плана положений необходимо
задаться масштабным коэффициентом
Для построения плана положений необходимо
задаться масштабным коэффициентом
![]() ,
определяемым как
,
определяемым как
![]() (2.31)
(2.31)
где
![]() - действительная длина звена 1;
- действительная длина звена 1;
![]() - длина отрезка, изображающего звено 1
на плане положений.
- длина отрезка, изображающего звено 1
на плане положений.
Иногда вместо масштабного коэффициента плана положений задают масштаб плана, который является обратной величиной масштабного коэффициента.
Значение масштабного
коэффициента определяет длину отрезка
![]() ,
соответствующего длине
,
соответствующего длине
![]() звена 2:
звена 2:
![]()
План положений
позволяет определить угол
![]() и координаты точек
и координаты точек
![]() и
и
![]() :
:
![]() (2.32)
(2.32)
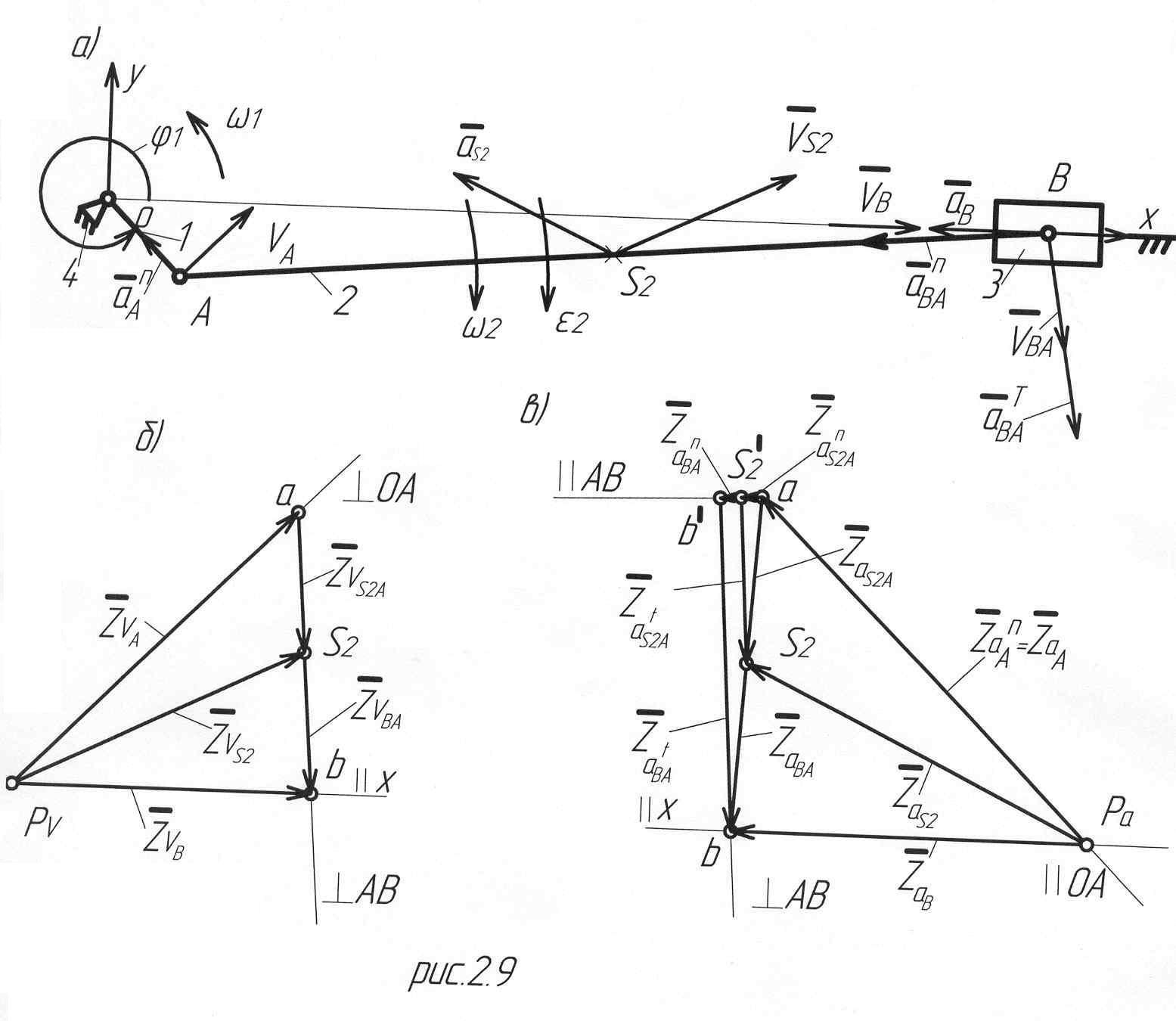
Для построения
плана скоростей должна быть известна
кинематическая схема механизма,
построенная в масштабе (рис. 2.9, а),
и задан закон движения начального звена
(например,
![]() ).
).

Требуется найти
линейные скорости точек
![]() ,
,
![]() и
и
![]() ,
и также угловую скорость звена 2.
,
и также угловую скорость звена 2.
Построение плана
скоростей начинается с определения
скорости точки
![]() кривошипа
кривошипа
![]() (2.33)
(2.33)
Вектор скорости
точки
![]() направлен перпендикулярно кривошипу
направлен перпендикулярно кривошипу
![]() в направлении его вращения.
в направлении его вращения.
Скорость точки
![]() ,
принадлежащей звену 2, можно представить
как векторную сумму скоростей переносного
,
принадлежащей звену 2, можно представить
как векторную сумму скоростей переносного
![]() и относительного
и относительного
![]() движений
движений
![]() (2.34)
(2.34)
Переносным движением
звена 2 является поступательное движение
его со скоростью точки
![]()
![]()
а относительным
– вращательное движение звена 2 вокруг
точки А. Если обозначить относительную
скорость через
![]() ,
то
,
то
![]()
Окончательное векторное уравнение для скорости точки В будет иметь вид
![]() (2.35)
(2.35)
В этом уравнении векторы скоростей, известные по величине и направлению, подчеркнуты двумя чертами, а известные лишь по направлению – одной чертой.
Для определения
указанных неизвестных величин строим
план скоростей с выбранным масштабным
коэффициентом
![]()
 (2.36)
(2.36)
Здесь
![]() - длина отрезка,
изображающего на плане скорость
- длина отрезка,
изображающего на плане скорость
![]() .
.
Из произвольной
точки полюса плана скоростей
![]() (рис. 2.9, б) проведем вектор
(рис. 2.9, б) проведем вектор
![]() ,
перпендикулярный кривошипу ОА,
соответствующий на плане скоростей
абсолютной скорости
,
перпендикулярный кривошипу ОА,
соответствующий на плане скоростей
абсолютной скорости
![]() .
Из конца вектора
.
Из конца вектора
![]() (точка а) проводим линию в направлении
относительной скорости
(точка а) проводим линию в направлении
относительной скорости
![]() ,
перпендикулярную
,
перпендикулярную
![]() ,
а из полюса
,
а из полюса
![]() - линию в направлении скорости
- линию в направлении скорости
![]() ,
параллельную
,
параллельную
![]() .
В пересечении указанных линий находим
точку b. Вектор
.
В пересечении указанных линий находим
точку b. Вектор
![]() изображает скорость
изображает скорость
![]() точки В, а вектор
точки В, а вектор
![]() - скорость
- скорость
![]() .
Величины действительных скоростей
определяют по формулам
.
Величины действительных скоростей
определяют по формулам
![]() (2.37)
(2.37)
Направление
скорости
![]() определяется при параллельном переносе
вектора
определяется при параллельном переносе
вектора
![]() в точку В механизма (рис. 2.9, а). Т.к.
вектор
в точку В механизма (рис. 2.9, а). Т.к.
вектор
![]() в точке В механизма направлен в сторону
положительной полуоси
в точке В механизма направлен в сторону
положительной полуоси
![]() ,
знак скорости
,
знак скорости
![]() будет положительным.
будет положительным.
Модуль угловой скорости звена 2 будет
![]() (2.38)
(2.38)
Направление
![]() находится по вектору
находится по вектору
![]() .
На рис. 2.9, а
.
На рис. 2.9, а
![]() направлена по часовой стрелке.
направлена по часовой стрелке.
Скорость точки
![]() определяется с помощью векторного
уравнения:
определяется с помощью векторного
уравнения:
![]() (2.39)
(2.39)
![]()
Здесь скорость
относительного движения точки
![]()
![]() находится методом пропорционального
деления отрезка ав
на плане скоростей, изображающего
относительную скорость
находится методом пропорционального
деления отрезка ав
на плане скоростей, изображающего
относительную скорость
![]()
![]() (2.40)
(2.40)
Действительная
скорость
![]() определяется как
определяется как
![]() (2.41)
(2.41)
Вопросы для самоконтроля.
-
Каковы задачи кинематического анализа рычажных механизмов?
-
Что называется кинематическими параметрами и кинематическими характеристиками звеньев и характерных точек механизмов?
-
Какие известны методы кинематического анализа рычажных механизмов, их достоинства и недостатки?
-
Когда используют метод замкнутых векторных контуров и в чём он заключается?
-
Что представляет собой графоаналитический метод кинематического анализа рычажных механизмов?
-
Что должно быть известно для построения планов скоростей рычажных механизмов?
-
Как определяется масштабный коэффициент плана скоростей?
-
Что называют переносным движением шатуна в кривошипно-ползунном механизме, в котором ведущее звено-кривошип?
-
Что называют относительным движением шатуна в кривошипно-ползунном механизме (ведущее звено-кривошип)?
-
Как определить значение и направление угловых скоростей звеньев механизма?