

2.4.1. Аналитический метод силового анализа механизмов
Аналитический метод рассмотрим на примере двух механизмов.
Кривошипно-ползунный механизм.
Исходными данными
являются: 1) кинематическая схема (рис.
2.5, а);
2) массы звеньев 2 и 3; причем,
центр масс звена 3 располагается в точке
![]() ,
т.е.
,
т.е.
![]() т.к. механизм центральный; масса звена
1, как правило, пренебрежимо мала; 3)
момент инерции звена 2; 4) величина
горизонтальной перегрузки; 5) постоянная
сила трения в уплотнениях при движении
поршня 3
т.к. механизм центральный; масса звена
1, как правило, пренебрежимо мала; 3)
момент инерции звена 2; 4) величина
горизонтальной перегрузки; 5) постоянная
сила трения в уплотнениях при движении
поршня 3
![]() ;
6) сила сопротивления
;
6) сила сопротивления
![]() ,
действующая на поршень, заданная в
табличной форме.
,
действующая на поршень, заданная в
табличной форме.
Силовой анализ
следует начать со структурной группы,
состоящей из звеньев 2, 3. Силовое
нагружение группы представлено на рис.
2.12, а. Неизвестные силы во вращательных
кинематических парах разложим на
составляющие по осям координат
![]() и
и
![]() .
Неизвестными являются силы
.
Неизвестными являются силы
![]() ,
сила
,
сила
![]() и ее плечо
и ее плечо
![]() ,
а также модуль и направление сил
взаимодействия в шарнире
,
а также модуль и направление сил
взаимодействия в шарнире
![]() ,
связанных соотношением
,
связанных соотношением
![]() .
.
Для определения шести неизвестных необходимо составить шесть уравнений равновесия.
1. Сумма проекций
на ось
![]() сил, приложенных к звеньям 2 и 3, равна
нулю
сил, приложенных к звеньям 2 и 3, равна
нулю
![]() .
Следовательно,
.
Следовательно,
![]() (2.63)
(2.63)
Из уравнения (2.63)
определяется сила
![]() .
Знаки в этом уравнении, как и во всех
последующих, имеют алгебраический
смысл. Это значит, что числовые значения
известных проекций сил подставляются
в уравнения равновесия со строгим
соблюдением их знаков.
.
Знаки в этом уравнении, как и во всех
последующих, имеют алгебраический
смысл. Это значит, что числовые значения
известных проекций сил подставляются
в уравнения равновесия со строгим
соблюдением их знаков.

2. Сумма моментов
всех сил, действующих на звено 2 и взятых
относительно точки
![]() ,
равна нулю
,
равна нулю
![]() Или
Или
![]() (2.64)
(2.64)
Здесь координаты
точек
![]() и
и
![]() известны из кинематического анализа
механизма (раздел 2.3.1); координаты точки
известны из кинематического анализа
механизма (раздел 2.3.1); координаты точки
![]() определяются формулами
определяются формулами
![]() (рис.
2.5, а); проекции силы инерции звена
2 равны
(рис.
2.5, а); проекции силы инерции звена
2 равны
 Из уравнения (2.64) определяется сила
Из уравнения (2.64) определяется сила
![]() .
.
3. Сумма проекций
на ось
![]() сил, приложенных к звеньям 2 и 3, равна
нулю
сил, приложенных к звеньям 2 и 3, равна
нулю
![]() .
Следовательно,
.
Следовательно,
![]() (2.65)
(2.65)
Отсюда определяется
сила
![]()
4. Сумма моментов
сил, действующих на звено 3, взятых
относительно точки
![]() ,
равна нулю
,
равна нулю
![]() .
Так как все силы, приложенные к звену
3, проходят через точку
.
Так как все силы, приложенные к звену
3, проходят через точку
![]() ,
то и сила
,
то и сила
![]() также проходит через точку
также проходит через точку
![]() ,
т.е. плечо
,
т.е. плечо
![]()
5. Сумма проекций
всех сил, приложенных к звену 3, на ось
![]() равна нулю
равна нулю
![]() :
:
![]() (2.66)
(2.66)
Отсюда определяется
сила
![]() .
.
6. Сумма проекций
на ось
![]() всех сил звена 3 равна нулю
всех сил звена 3 равна нулю
![]() :
:
![]() . (2.67)
. (2.67)
Из этого уравнения
определяется сила
![]() .
.
Два последних
уравнения могли быть составлены для
звена 2. Тогда они позволили бы определить
силы
![]() и
и
![]() .
.
Модуль силы во
вращательной кинематической паре,
например
![]() ,
определяется формулой
,
определяется формулой
![]() (2.68)
(2.68)
а направление силы
определяется углом
![]() (рис. 2.11, а)
(рис. 2.11, а)
 (2.69)
(2.69)
Для определения
силы
![]() в кинематической паре
в кинематической паре
![]() и уравновешивающего момента
и уравновешивающего момента
![]() необходимо рассмотреть равновесие
начального звена (рис. 2.12, б). На это звено
действует лишь известная сила во
вращательной кинематической паре
необходимо рассмотреть равновесие
начального звена (рис. 2.12, б). На это звено
действует лишь известная сила во
вращательной кинематической паре
![]()
![]() .
Величина уравновешивающего момента
определяется из уравнения равновесия
звена 1 в виде суммы моментов сил, взятых
относительно точки
.
Величина уравновешивающего момента
определяется из уравнения равновесия
звена 1 в виде суммы моментов сил, взятых
относительно точки
![]()
![]() .
Или
.
Или
![]() . (2.70)
. (2.70)
Очевидно, что
![]() .
.
Результаты силового анализа, выполненного по приведенному алгоритму на ЭВМ, позволяют получить силовые характеристики механизма.
Примеры таких
характеристик показаны на рис. 2.13.
Характеристики получены для силы
сопротивления
![]() ,
которая равна нулю для холостого хода
ползуна
,
которая равна нулю для холостого хода
ползуна
![]() и изменяется по параболической зависимости
для рабочего хода
и изменяется по параболической зависимости
для рабочего хода
![]() .
На рис. 2.13, а показан годограф силы
.
На рис. 2.13, а показан годограф силы
![]() ,
действующей в кинематической паре А на
звено 2. Годограф силы показывает
изменение величины и направления вектора
силы в зависимости от обобщенной
координаты (в нашем примере
,
действующей в кинематической паре А на
звено 2. Годограф силы показывает
изменение величины и направления вектора
силы в зависимости от обобщенной
координаты (в нашем примере
![]() ).
При построении годографа силы масштабы
вертикальной и горизонтальной составляющих
этой силы должны быть одинаковыми, и
отсчет двух составляющих должен идти
от нулевого значения. В противном случае
действительное направление вектора
силы будет потеряно. На годографе силы
).
При построении годографа силы масштабы
вертикальной и горизонтальной составляющих
этой силы должны быть одинаковыми, и
отсчет двух составляющих должен идти
от нулевого значения. В противном случае
действительное направление вектора
силы будет потеряно. На годографе силы
![]() для углов
для углов
![]() и
и
![]() наблюдаются скачки силы. Они связаны
со скачкообразным изменением сил трения
наблюдаются скачки силы. Они связаны
со скачкообразным изменением сил трения
![]() и сопротивления
и сопротивления
![]() при изменении направления движения
ползуна.
при изменении направления движения
ползуна.


На рис. 2.13, б
представлены зависимости уравновешивающего
момента
![]() и силы
и силы
![]() от обобщенной координаты
от обобщенной координаты
![]() .
.
Механизм с гидроцилиндром.
Известны
кинематическая схема (рис. 2.10, а);
массы и моменты инерции звеньев; величина
горизонтальной перегрузки
![]() ;
постоянная величина момента трения в
шарнире
;
постоянная величина момента трения в
шарнире
![]()
![]() ;
сила сопротивления
;
сила сопротивления
![]() ,
действующая на звено 3 в точке
,
действующая на звено 3 в точке
![]() ,
заданная в табличной форме; постоянная
сила трения в гидроцилиндре
,
заданная в табличной форме; постоянная
сила трения в гидроцилиндре
![]() .
Необходимо определить силы во вращательных
кинематических парах
.
Необходимо определить силы во вращательных
кинематических парах
![]() ,
,
![]() и С, силу в поступательной кинематической
паре, образованной цилиндром 1 и поршнем
со штоком 2, а также уравновешивающую
силу
и С, силу в поступательной кинематической
паре, образованной цилиндром 1 и поршнем
со штоком 2, а также уравновешивающую
силу
![]() ,
которую надо приложить со стороны
жидкости к поршню цилиндра, чтобы весь
механизм находился в равновесии.
,
которую надо приложить со стороны
жидкости к поршню цилиндра, чтобы весь
механизм находился в равновесии.
Поскольку механизм с гидроцилиндром является неделимой структурной единицей, силовой анализ проводится для всего механизма. Расчет состоит из двух этапов. На первом этапе расчета определяют силы в шарнирах А, В и С, мысленно “замораживая” поршень со штоком в гидроцилиндре в расчетном положении. Таким образом, механизм рассматривается как двухповодковая группа первого вида.
На втором этапе, отделив звено 1 от звена 2, определяют остальные неизвестные силы.
Схема механизма с “замороженным” гидроцилиндром со всеми действующими на него силами и моментами представлена на рис. 2.14, а. На рисунке не показаны силы инерции и моменты инерции звеньев, которыми можно пренебречь ввиду их малости.
Запишем шесть уравнений равновесия, из которых можно определить неизвестные силы, действующие во вращательных парах А, В и С.
1)![]() .
Или
.
Или
![]() (2.71)
(2.71)
2)![]() .
Или
.
Или
![]() (2.72)
(2.72)
Совместное
решение уравнений даст значения
неизвестных сил
![]() и
и
![]() .
.
Знаки в уравнениях моментов поставлены формально, а моменты сил определяются как в примере кривошипно-ползунного механизма.
3)![]() .
Или
.
Или
![]() , (2.73)
, (2.73)
откуда
определяется сила
![]() .
.
4)![]() .
Или
.
Или
![]() , (2.74)
, (2.74)
откуда
определяется сила
![]() .
.
5)![]() .
Или
.
Или
![]() , (2.75)
, (2.75)
отсюда
определяется сила
![]()
6)![]() .
Или
.
Или
![]() , (2.76)
, (2.76)
отсюда
определяется сила
![]() .
.
Для
определения уравновешивающей силы
![]() и силы, действующей в поступательной
паре звеньев 1 и 2, отделим поршень со
штоком от цилиндра и рассмотрим равновесие
начального звена 2 (рис. 2.14, б). Поступательная
пара образована двумя точками контакта
цилиндра и поршня со штоком
и силы, действующей в поступательной
паре звеньев 1 и 2, отделим поршень со
штоком от цилиндра и рассмотрим равновесие
начального звена 2 (рис. 2.14, б). Поступательная
пара образована двумя точками контакта
цилиндра и поршня со штоком
![]() и
и
![]() ,
в которых действуют силы
,
в которых действуют силы
![]() и
и
![]() .
.

б)
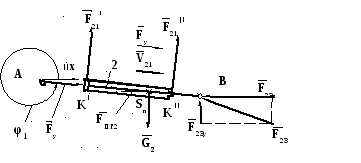
Рис. 2.14
Для определения трех неизвестных сил можно составить три уравнения равновесия
1)![]() .
Или
.
Или
![]() ; (2.77)
; (2.77)
2)![]() .
Или
.
Или
![]() ; (2.78)
; (2.78)
3)
Сумма всех сил, действующих на звено 2,
в проекции на линию
![]() равна нулю
равна нулю
![]() .
Или
.
Или
![]() . (2.79)
. (2.79)
Из
трех уравнений определяются соответственно
силы
![]() .
.
Приведенный
алгоритм позволяет получить с помощью
ЭВМ силовые характеристики механизма
с гидроцилиндром. В качестве примера
на
рис. 2.15,![]() приведен годограф силы в шарнире
приведен годограф силы в шарнире
![]()
![]() .
Сплошной линией обозначен годограф,
соответствующий положительной скорости
поршня, а штриховой – отрицательной.
Номера точек (0)…(5) указывают пять
дискретных положений поршня в цилиндре
при изменении обобщенной координаты
от
.
Сплошной линией обозначен годограф,
соответствующий положительной скорости
поршня, а штриховой – отрицательной.
Номера точек (0)…(5) указывают пять
дискретных положений поршня в цилиндре
при изменении обобщенной координаты
от
![]() до
до
![]() .
.
На
рис. 2.15,б показана зависимость
уравновешивающей силы
![]() от положения поршня для двух направлений
движения поршня в цилиндре. В двух
точках, соответствующих двум крайним
положениям поршням в цилиндре, на
годографе силы и на зависимости
от положения поршня для двух направлений
движения поршня в цилиндре. В двух
точках, соответствующих двум крайним
положениям поршням в цилиндре, на
годографе силы и на зависимости
![]() наблюдаются скачки. Они связаны со
скачкообразным изменением силы трения
наблюдаются скачки. Они связаны со
скачкообразным изменением силы трения
![]() и момента трения
и момента трения
![]() .
.
а)

б)
V21›0
V21‹0

Вопросы для самоконтроля.
-
Каковы задачи силового анализа рычажных механизмов?
-
Что называют уравновешивающей силой и уравновешивающим моментом?
-
В чём заключается метод кинетостатики?
-
Как действуют силы взаимодействия в низших вращательных и поступательных кинематических парах?
-
Что является статически определимой системой плоских рычажных механизмов, содержащих только низшие кинематические пары?
-
Каков порядок проведения силового анализа рычажных механизмов без избыточных связей при отсутствии трения в кинематических парах?
-
Какие исходные данные необходимы для проведения силового анализа рычажных механизмов?
-
Какими силами и моментами представлено внешнее силовое нагружение рычажного механизма?
-
Какие методы используют для силового анализа рычажных механизмов и каковы особенности их использования?
-
Что показывает годограф силы в кинематической паре?
-
Какова особенность проведения силового анализа механизмов с гидроцилиндром?