

2.3.1. Аналитический метод кинематического анализа рычажных механизмов
Наиболее распространенным методом является метод замкнутых векторных контуров. Для его использования вдоль каждого звена, составляющего замкнутый контур, направляют вектор. Угловое положение его определяется углом, положительное направление которого отсчитывается в направлении против часовой стрелки от положительной полуоси абсцисс. Метод сводится к совместному решению уравнений проекций на оси координат векторного контура механизма с последующим дифференцированием полученных уравнений для определения скоростей и ускорений.
Ниже приведены примеры кинематического анализа некоторых механизмов.
Кривошипно-ползунный
механизм. Кинематическая схема
механизма приведена на рис. 2.5, а.
Для механизма известны: длины звеньев
![]() ,
,
![]() ;
угловая скорость начального звена
;
угловая скорость начального звена
![]() ;
расположение центра тяжести звена
2
– точки
;
расположение центра тяжести звена
2
– точки
![]() .
Необходимо определить кинематические
параметры звеньев 2 и 3 в функции положения
ведущего звена
.
Необходимо определить кинематические
параметры звеньев 2 и 3 в функции положения
ведущего звена
![]() а также закон движения точки
а также закон движения точки
![]() :
:
![]()
а)
б)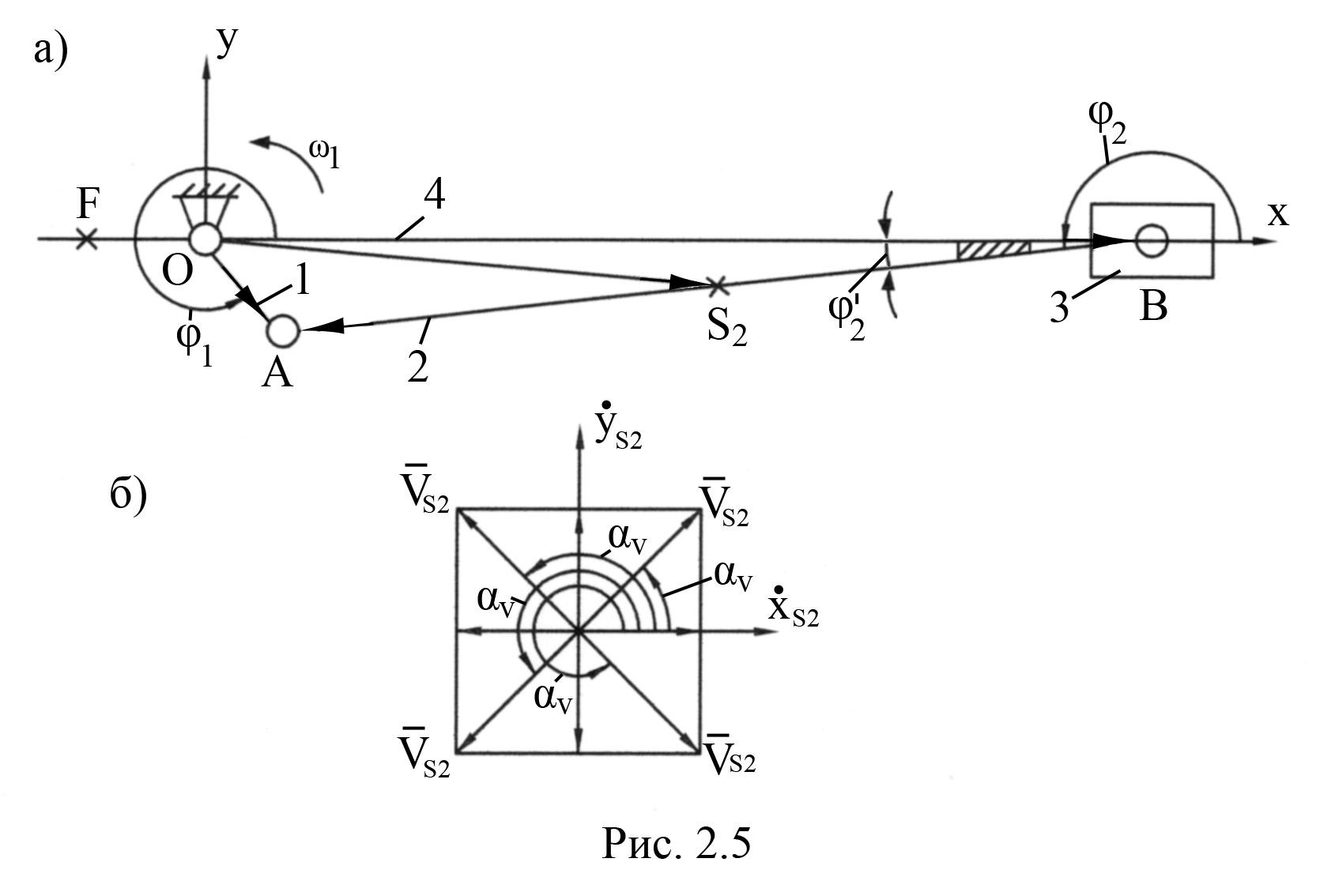
Начало координат
![]() системы координат
системы координат
![]() располагают на оси вращения начального
звена или в какой-либо другой точке, а
ось абсцисс Ох связывают со стойкой
(точки
располагают на оси вращения начального
звена или в какой-либо другой точке, а
ось абсцисс Ох связывают со стойкой
(точки
![]() и
и
![]() механизма на рис. 2.5, а). На этом же
рисунке показаны направления векторов
и соответствующие им углы для замкнутого
векторного треугольника
механизма на рис. 2.5, а). На этом же
рисунке показаны направления векторов
и соответствующие им углы для замкнутого
векторного треугольника
![]() .
.
Векторное уравнение замкнутого треугольника имеет вид
![]() (2.2)
(2.2)
Спроектируем векторное уравнение на оси координат х и у
 (2.3)
(2.3)
С помощью второго
уравнения системы уравнений (2.3) можно
определить угол
![]()
![]() при
при
![]() (2.4)
(2.4)
![]() при
при
![]()
где
![]() - острый угол
- острый угол
![]() ; (2.5)
; (2.5)
![]() – признак сборки
кривошипно-ползунного механизма,
определяемый с помощью дополнительной
точки
– признак сборки
кривошипно-ползунного механизма,
определяемый с помощью дополнительной
точки
![]() (рис. 2.5, а). Точка
(рис. 2.5, а). Точка
![]() расположена на оси
расположена на оси
![]() .
Признак сборки
.
Признак сборки
![]() если ползун расположен слева от точки
если ползун расположен слева от точки
![]() кривошипа, и
кривошипа, и
![]() при правом расположении ползуна
относительно кривошипа. Для механизма
на рис. 2.5, а
при правом расположении ползуна
относительно кривошипа. Для механизма
на рис. 2.5, а
![]()
Из первого уравнения системы уравнений (2.3) можно определить координату точки В
![]() (2.6)
(2.6)
Для определения скоростей звеньев 2 и 3 продифференцируем систему двух уравнений (2.3) по времени
 (2.7)
(2.7)
Или с учетом равенств
![]()
![]()
![]()
будем иметь систему
 (2.8)
(2.8)
Из второго уравнения
системы уравнений (2.8) получим выражение
для
![]() ,
а из первого – для
,
а из первого – для
![]() :
:
![]() (2.9)
(2.9)
![]() (2.10)
(2.10)
Повторное дифференцирование системы уравнений (2.8) позволяет получить выражения для ускорений звеньев 2 и 3. С учетом равенств
![]()
![]()
![]()
эти выражения имеют вид
![]() (2.11)
(2.11)
![]() (2.12)
(2.12)
Для определения
закона движения центра тяжести звена
2 – точки
![]() составим новый замкнутый векторный
контур
составим новый замкнутый векторный
контур
![]() (рис. 2.5, а). Векторное уравнение его
имеет вид
(рис. 2.5, а). Векторное уравнение его
имеет вид
![]() (2.13)
(2.13)
Проектируя уравнение на оси координат, получим координаты точки S2
 (2.14)
(2.14)
Первая и вторая
производные от
![]() и
и
![]() дадут значения составляющих скорости
и ускорения точки
дадут значения составляющих скорости
и ускорения точки
![]()
![]() (2.15)
(2.15)
![]() (2.16)
(2.16)
 (2.17)
(2.17)
 (2.18)
(2.18)
Значения полных
векторов скорости и ускорения точки
![]() будут
будут
![]() (2.19)
(2.19)
 (2.20)
(2.20)
Положение вектора
скорости относительно оси
![]() определяется углом
определяется углом
![]() (рис. 2.5, б)
(рис. 2.5, б)
 при
при
![]()
(2.21)
 при
при
![]()
Аналогично
определяется положение вектора ускорения
углом
![]()
 при
при
![]() (2.22)
(2.22)
 при
при
![]() (2.23)
(2.23)
Результаты
вычисления кинематических характеристик
звеньев 2 и 3, выполненных на ЭВМ для
кривошипно-ползунного механизма с
исходными данными
![]() приведены соответственно на
рис. 2.6,
а и 2.6, б.
приведены соответственно на
рис. 2.6,
а и 2.6, б.

б)
ав,м/с2
vB,м/с
хВ,м
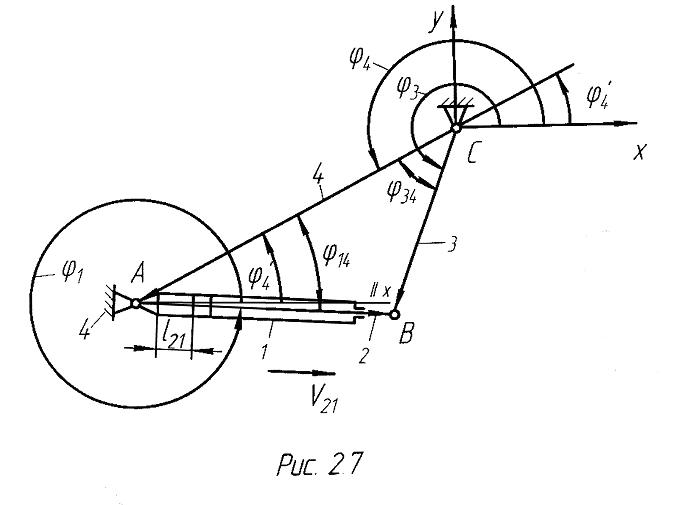
Механизм с
гидроцилиндром. Кинематическая схема
механизма приведена на рис. 2.7. Обобщенной
координатой здесь является положение
поршня со штоком 2 относительно
гидроцилиндра 1
![]() .
Известны длины звеньев
.
Известны длины звеньев
![]() угол
угол
![]() ,
определяющий положение стойки
,
определяющий положение стойки
![]() ;
скорость поршня относительно цилиндра
;
скорость поршня относительно цилиндра
![]() .
Необходимо определить кинематические
параметры звеньев 1-2 – гидроцилиндра
с поршнем и коромысла 3 в функции
обобщенной координаты:
.
Необходимо определить кинематические
параметры звеньев 1-2 – гидроцилиндра
с поршнем и коромысла 3 в функции
обобщенной координаты:
![]()
Если принять
направления векторов, связанных со
звеньями, в соответствии с рис. 2.7, то
векторное уравнение замкнутости контура
![]() имеет вид
имеет вид
![]()
Проекции векторного
уравнения на оси координат х и у дадут
систему уравнений, из которой можно
определить искомые углы
![]() и
и
![]() :
:
 (2.24)
(2.24)
Здесь
![]() -
длина гидроцилиндра со штоком поршня;
-
длина гидроцилиндра со штоком поршня;
![]() -
расстояние между точками
-
расстояние между точками
![]() и
и
![]() при вдвинутом поршне.
при вдвинутом поршне.
Поскольку неизвестные углы находятся под знаком тригонометрических функций, определение их несколько затруднено. Можно предложить более простой путь решения задачи о положениях.
Определим
вспомогательные углы
![]() и
и
![]() по теореме косинусов из
по теореме косинусов из
![]()
![]()
![]()
Искомые углы
![]() и
и
![]() определяются по рис. 2.7:
определяются по рис. 2.7:
![]()
Здесь угол
![]() представляет собой модуль вспомогательного
угла
представляет собой модуль вспомогательного
угла
![]() и определяется как
и определяется как
![]()
Формулы для
определения углов
![]() и
и
![]() не является универсальными, а справедливы
только для данной схемы механизма.
не является универсальными, а справедливы
только для данной схемы механизма.
Для определения угловых скоростей звеньев 1-2 и 3 необходимо продифференцировать по времени систему уравнений (2.24). С учетом равенств
![]()
будем иметь систему уравнений
 (2.25)
(2.25)
Решая ее относительно
неизвестных
![]() и
и
![]() путем несложных преобразований получим
следующие выражения для угловых скоростей
путем несложных преобразований получим
следующие выражения для угловых скоростей
![]() (2.26)
(2.26)
![]() (2.27)
(2.27)
Аналогично определяются угловые ускорения звеньев. Дифференцирование системы уравнений (2.25) по времени с учетом равенств
![]()
дает следующую
систему двух уравнений при условии, что
![]() и
и
![]()
 (2.28)
(2.28)
Отсюда определяются искомые выражения для угловых ускорений звеньев
![]() (2.29)
(2.29)
![]() (2.30)
(2.30)
Очевидно, что
![]() и
и
![]()
Полученные формулы для определения угловых скоростей и ускорений звеньев 1-2 и 3 являются универсальными, т.е. справедливы для любой схемы механизма с гидроцилиндром II класса с принятыми направлениями векторов.
Результаты
вычисления кинематических характеристик
поршня со штоком и звена 3 в функции
обобщенной координаты для обоих
направлений движения поршня (![]() и
и
![]() )
приведены на рис. 2.8, а и 2.8, б
соответственно и рассчитаны для механизма
со следующими исходными данными:
)
приведены на рис. 2.8, а и 2.8, б
соответственно и рассчитаны для механизма
со следующими исходными данными:
![]()
