

возможность этого явления при планировании рейсов, что будет способствовать повышению безопасности плавания.
2.6. Наблюдаемые на судне параметры волнения
Вследствие хода судна воспринимаемое им волновое возмущение по скорости распространения, периоду и частоте отличается от волнения на поверхности моря. Наблюдаемые на движущемся судне параметры волнения называют кажущимися, или параметрами встречи судна с волнами, либо параметрами воздействия волн на судно. В обозначениях этих величин ниже будет использоваться индекс e , который указывает что это − параметры встречи судна с волнами
(encounter parameters).
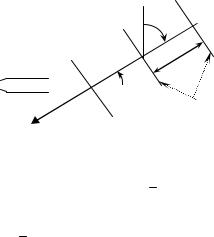
Гребни волн (рис. 2.9) перемещаются относительно движущегося судна со скоростью νe , определяемой по формуле:
νe =ν +V cos q ; |
(2.19) |
где V – скорость судна; q – курсовой угол волнения.
АW
λ
q  V
V
 Вершины v волн
Вершины v волн
Рис. 2.9. Взаимное движение судна и волн
В результате кажущийся период τe волнения оказывается равным:
τ |
e = λ /νe = |
λ |
. |
(2.20) |
|
|
|||||
ν +V cos q |
|||||
|
|
|
|
69

Отсюда следует, что при острых курсовых углах ход судна уменьшает кажущийся период волн по сравнению с истинным
периодом, а при тупых – увеличивает. Зная τe , можно найти частоту встречи судна с волнами:
ωe = |
2π |
= ω + ΩV cos q . |
(2.21) |
|||
|
|
|
||||
τ |
e |
|||||
|
|
|
||||
|
|
|
|
|
||
Параметры качки определяются параметрами волнового воздействия на судно. Поэтому для их расчета требуется
использовать спектр Sr (ωe ) , представляющий распределение
энергии по частоте встречи с волнами. Этот спектр можно определить, учитывая, что при воздействии волн на судно с
частотой ωe величина энергии в элементарной полосе dωe равна энергии истинного волнения в малом интервале dω :
Sr (ωe )dωe |
|
= Sr (ω)dω . |
(2.22) |
||||||||||||||||||||
Отсюда следует, что: |
|
|
|
Sr (ω) |
|
|
|
|
|
|
|
||||||||||||
Sr (ωe ) = |
|
|
|
|
|
|
. |
|
|
|
(2.23) |
||||||||||||
|
|
dωe / dω |
|
|
|
|
|
||||||||||||||||
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Для глубоководного волнения, принимая во внимание (2.21) |
|||||||||||||||||||||||
и (2.4), получаем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
dωe |
=1+ |
|
|
2Vω |
cosq . |
|
||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||
|
dω |
|
|
|
|
g |
|
|
|
|
|
|
|
||||||||||
Отсюда следует, что ординаты спектра Sr (ωe ) при больших |
|||||||||||||||||||||||
глубинах могут быть рассчитаны по формуле: |
|
||||||||||||||||||||||
Sr (ωe ) = |
|
|
|
|
|
|
|
|
Sr (ω) |
|
|
|
|
|
. |
|
|||||||
|
|
1+ |
|
2Vω |
cos q |
|
|
|
|||||||||||||||
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
g |
|
|
|
|
|
|
|
|||
С учетом глубины отношение dωe / dω можно представить |
|||||||||||||||||||||||
в виде: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
dωe |
=1+ |
V cosq |
|
; |
|
|
|
|
|||||||||||||
|
|
|
dω / dΩ |
|
|
|
|
||||||||||||||||
|
|
dω |
|
|
|
|
|
|
|
|
|
|
|||||||||||
70
|
|
|
g tanh(ΩH ) + |
Ωg |
|
|
|
где |
dω |
= |
H cosh |
2 (ΩH ) |
|
. |
|
dΩ |
2 Ωg tanh(ΩH ) |
|
|
||||
|
|
|
|
|
|||
Применение спектров Sr (ωe ) волнового воздействия на
судно связано с определенными вычислительными проблемами, так как на попутном волнении в знаменателе (2.23) в скобках может быть ноль и отрицательное число. Учитывая (2.22),
моменты m′jr кажущегося спектра могут быть рассчитаны без использования его выражения:
∞∞
m′jr = ∫ωej Sr (ωe )dωe =∫ωej Sr (ω)dω . (2.24)
0 0
Это обстоятельство используется при расчетах качки движущегося судна.
71
3. Основные сведения о бортовых средствах контроля мореходности
3.1. Назначение и состав АСКМ
Бортовая система контроля мореходности (АСКМ) представляет собой информационную систему, которая получает, хранит, обрабатывает информацию, необходимую для оценки, прогноза и оптимизации мореходности судна, и отображает результаты обработки в виде, облегчающем принятие решений по обеспечению безопасности судна и груза. Следует обратить внимание, что в названии системы термин «контроль» применен в широком смысле и обозначает совокупность наблюдения, оценки, прогноза и выработки активных мер для улучшения процесса.
Основное назначение АСКМ – повышение безопасности судна и груза, защиты окружающей среды, эффективности перевозок грузов морем. АСКМ оказывает судоводителям информационную поддержку при управлении судном в штормовых условиях. Это достигается предоставлением вахтенному помощнику полной и точной информации о мореходности судна, прогнозированием реакции судна на ветроволновые воздействия, предупреждением о приближении параметров мореходности к допустимым границам, тревогой об опасностях, выработкой рекомендаций для решения возникающих проблем.
Задачи, которые решает бортовая система контроля мореходности, могут быть разделены на три категории:
−оперативная оценка мореходности судна;
−прогноз состояния судна на оставшуюся часть рейса с оценкой его мореходности;
−выработка рекомендаций по оптимизации мореходности.
Состав АСКМ. Системы контроля мореходности выпускаются в разных конфигурациях, обеспечивающих приспособление образцов этих средств к различным типам
72

судов и к желаниям судовладельцев. Эти системы могут использоваться на морских судах всех типов и размеров. Различают АСКМ для крупнотоннажных балкеров и танкеров, контейнеровозов, пассажирских лайнеров, военных кораблей. АСКМ может являться составной частью интегрированной системы ходового мостика, навигационно-информационной системы, централизованной судовой системы мониторинга и сигнализации, систем стабилизации качки. Обычно конфигурация выбираемой для судна АСКМ, тип дисплея, формы и средства для оперирования данными определяются судовладельцами совместно с поставщиками АСКМ с учетом руководств и рекомендаций к этим системам, разработанным ИМО [24] и рядом классификационных обществ, например, ABS
– Американским бюро судоходства [15], LR – Регистром Ллойда [21], DNV – Норвежским бюро Веритас, и др.
Основными частями всех АСКМ являются:
•аппаратные средства;
•информационное обеспечение (данные);
•программное обеспечение;
•средства общения АСКМ с оператором;
Рис. 3.1. Основной модуль АСКМ
Аппаратные средства включает основной модуль, периферийную аппаратуру и каналы связи. Основной модуль – это помещенный в специальной консоли высокопроизводительный персональный компьютер, имеющий каналы для соединения с датчиками информации о ветре, волнении, о параметрах движения судового корпуса и нагрузках
73
на нем. Он устанавливается в рулевой рубке, включает в себя системный блок, монитор, управляющую панель. На дисплее отображаются данные мониторинга характеристик мореходности, результаты их анализа и прогнозы значений на будущие моменты времени. Общий вид основного модуля одной из АСКМ приведен на рис. 3.1.
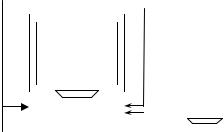
Периферийная аппаратура. Система контроля мореходности использует данные, поступающие из различных источников, и передает свои сведения другим системам и устройствам. На рис. 3.2 приведена одна из возможных конфигураций АСКМ с периферийными приборами.
Датчик ветра |
|
|
|
|
|
|
|
Станция |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
спутниковой связи |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|||
Датчик волнения |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Основной |
||||||
Датчики качки |
|
|
|
|||||||
|
|
|
модуль |
|
|
|
||||
|
|
|
|
|
|
|
|
|
ПК для |
|
Датчики нагрузок |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
расчета |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
загрузки |
|
Гирокомпас |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
Лаг |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.2. Пример аппаратного обеспечения АСКМ
К основному модулю АСКМ могут подключаться датчики параметров качки, устройства для измерений напряжений элементов корпуса, компас, лаг, указатель скорости поворота, датчики элементов ветра, волнения, GPS-приемник, датчики упора, момента, частоты вращения гребного винта и другие приборы. АСКМ может быть интегрирована со станцией спутниковой связи, с компьютером для расчета плана загрузки судна и управления ей, со станцией планирования пути судна, с системами контроля балластного состояния, крена и дифферента судна, с радаром для измерения параметров волнения, с регистратором данных рейса, с системами стабилизации качки. С помощью станции спутниковой связи принимается информация о текущей и ожидаемой погоде, а также передаются данные о мореходности судна в офис
74
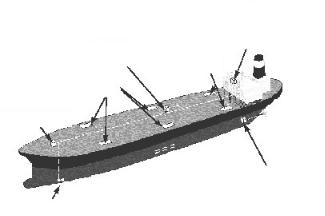
компании или другим береговым организациям. Расположение на судне элементов одной из АСКМ показано на рис. 3.3.
Мостик: Датчики: положения, путевого угла и скорости судна. Компьютер.
Акселерометры Датчики напряжения
Датчики
напряжения
Акселерометр
Машинное отделение: Датчики упора винта, момента на валу, мощности, частоты винта
Датчики давления воды
Рис. 3.3. Расположение элементов АСКМ на судне
Основные модули систем контроля мореходности.
Условно или конструктивно АСКМ может быть разделена на следующие подсистемы:
•текущей оценки мореходности;
•прогноза мореходности;
•оптимизации мореходности.
Эти модули могут выступать как отдельные самостоятельные системы или быть объединенными в АСКМ. Для текущей оценки мореходности может использоваться и два отдельных модуля:
−мониторинга и анализа движения корпуса судна;
−мониторинга и анализа нагрузок на корпус и главный двигатель;
Информационное обеспечение АСКМ включает массивы
данных (базы, и иные структурированные наборы), средства упорядочивания, кодирования, сжатия данных, системы конвертации форматов и другие элементы. Главную часть информационного обеспечения составляют хранящиеся в памяти АСКМ данные, требуемые для выполнения ее задач. Это сведения о судне, необходимые для расчета параметров качки и других величин, климатическая база данных, спектры ветрового
75