

4.14. Двигатели постоянного тока и их характеристики
В зависимости от способа подключения обмотки возбуждения к обмотке якоря различают следующие типы: параллельного, последовательного, смешанного возбужденя.
Рассмотрим двигатель параллельного возбуждения.
Полная электрическая мощность, подводимая к двигателю из сети, равна
![]() ,
где
,
где![]() – напряжение на зажимах двигателя;
– напряжение на зажимах двигателя;![]() – ток, потребляемый двигателем из сети;
– ток, потребляемый двигателем из сети;![]() – ток в якоре;
– ток в якоре;![]() – ток возбуждения.
– ток возбуждения.
Часть
мощности
![]() тратится на покрытие потерь в цепи
возбуждения
тратится на покрытие потерь в цепи
возбуждения
![]() и
потерь в цени якоря
и
потерь в цени якоря
![]() .
Остальная мощность преобразуется в
электромагнитную мощность
.
Остальная мощность преобразуется в
электромагнитную мощность
![]() .Следовательно,
.Следовательно,
![]() .
Полезная
механическая мощность
.
Полезная
механическая мощность
![]() ,
отдаваемая двигателем, меньше
электромагнитной мощности
,
отдаваемая двигателем, меньше
электромагнитной мощности
![]() на
величину потерь холостого хода
на
величину потерь холостого хода
![]() :
:
![]() .
.
ЭДС
![]() ,индуцируемая
в обмотке якоря двигателя при его
вращении, называется
обратной
ЭДС,
поскольку направлена встречно относительно
тока
,индуцируемая
в обмотке якоря двигателя при его
вращении, называется
обратной
ЭДС,
поскольку направлена встречно относительно
тока
![]() (мощность потребляется).
(мощность потребляется).
В
установившемся режиме работы двигателя
ток якоря
![]() ,
магнитный поток
,
магнитный поток![]() и частота вращения
и частота вращения![]() постоянны. В двигателе существуют две
обратные ЭДС:
постоянны. В двигателе существуют две
обратные ЭДС:![]() и
и
![]() ,
причем
,
причем
![]() .
Заменив
в последнем уравнении
.
Заменив
в последнем уравнении
![]() и выразив угловую скорость вращения,
получим механическую характеристику
двигателя:
и выразив угловую скорость вращения,
получим механическую характеристику
двигателя:
 или
или .
.
Уравнение
ЭДС двигателя (получено из формулы для
электромагнитной мощности или умножением
последнего выражения на
![]() ):
):
![]() ,
где
,
где![]() – подводимая к якорю мощность;
– подводимая к якорю мощность;![]() и
и![]() – составляющие этой мощности.
– составляющие этой мощности.
Электромагнитная
мощность
![]() преобразуется в механическую мощность;
мощность
преобразуется в механическую мощность;
мощность
![]() расходуется на покрытие потерь в цепи
якоря.
расходуется на покрытие потерь в цепи
якоря.
В
установившемся режиме работы (при
![]() )
в двигателе действуют три момента:
)
в двигателе действуют три момента:
– вращающий электромагнитный момент М;
– полезный
тормозной момент нагрузки
![]() ;
;
– тормозной
момент при холостом ходе
![]() (потери в обмотках и на трение).
(потери в обмотках и на трение).
Закон равновесия моментов:
![]() .
.
При
![]() вращающий момент двигателя содержитдинамический
момент
вращающий момент двигателя содержитдинамический
момент
![]() ,
обусловленный моментом инерции
J
всех вращающихся масс:
,
обусловленный моментом инерции
J
всех вращающихся масс:
![]() .
.
Свойства двигателей постоянного тока определяются по совокупности пусковых, рабочих и регулировочных характеристик.
Пусковые
характеристики
определяют пусковую операцию от момента
пуска двигателя до момента перехода к
установившемуся режиму работы. К кусковым
характеристикам относятся пусковой
ток
![]() ,
пусковой момент
,
пусковой момент![]() ,
время пуска
,
время пуска![]() ,
экономичность пуска (энергозатраты),
стоимость и надежностью пусковой
аппаратуры.
,
экономичность пуска (энергозатраты),
стоимость и надежностью пусковой
аппаратуры.
Рабочие
характеристики
определяют свойства двигателя при
установившемся режиме работы: зависимости
![]() ,
,![]() ,
,![]() от мощности
от мощности![]() .
.
Регулировочные характеристики определяют свойства двигателей при регулировании частоты вращения: пределы регулирования по частоте вращения; экономичность регулирования с точки зрения первоначальных затрат на оборудование и последующих эксплуатационных расходов; характер регулирования – плавный или ступенчатый, простота и надежность регулировочной аппаратуры и операций по регулированию частоты вращения.
Способы пуска двигателей: прямое включение, реостатный способ пуска (с реостатом в цепя якоря), изменение подводимого к двигателю при пуске напряжения.
Прямой пуск самый простой и дешевый, осуществляется прямым включением двигателя на полное напряжение сети. Недостатком способа являются значительные пусковые токи, опасность возникновения кругового огня по коллектору, значительное падение напряжения в питающей сети.
Реостатный пуск применяют для снижения броска тока при пуске.
В установках большой мощности (свыше 200 кВт) пусковой реостат не используется из-за значительных потерь энергии. Применяют безреостатный пуск путем изменения подводимого напряжения.
Напряжение двигателя при регулировании частоты вращения:
![]() ,
где
,
где![]() – падение напряжения на регулировочном
реостате. Или
– падение напряжения на регулировочном
реостате. Или
![]() .
.
Откуда
 .
.
Таким
образом, частоту вращения двигателей
постоянного тока можно регулировать
тремя способами: изменением напряжения
сети
![]() ,
реостатом в цепи якоря
,
реостатом в цепи якоря![]() ,
потоком возбуждения
Ф.
,
потоком возбуждения
Ф.
Двигатель последовательного возбуждения. Способы регулирования частоты вращения двигателя последовательного возбуждения: изменение потока Ф; шунтирование обмотки возбуждения; шунтирование обмотки якоря.
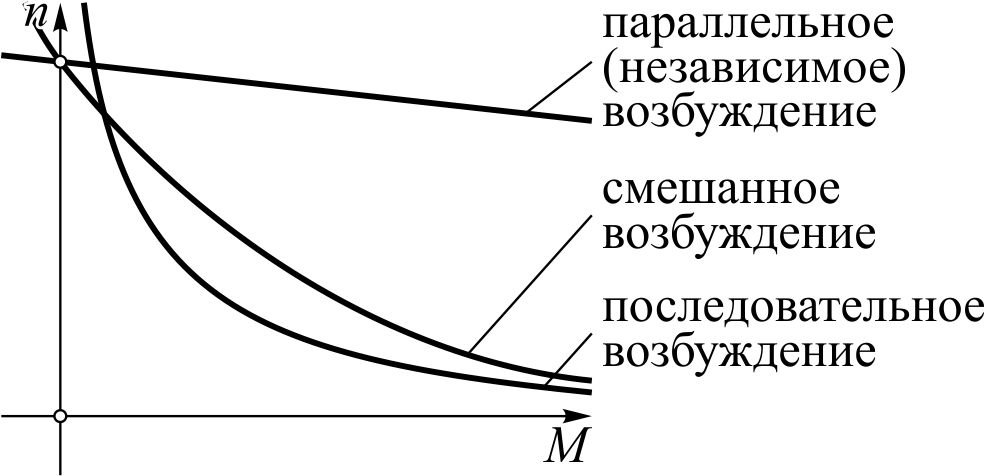
Рис. 4.27. Механические характеристики двигателя последовательного возбуждения в сравнении с характеристиками двигателей постоянного тока других типов возбуждения.
Механическая характеристика таких двигателей в линейном приближении определяется выражением:
 ,
гдеk
– коэффициент пропорциональности
магнитного потока и тока возбуждения
линейной части характеристики холостого
хода двигателя, см. рисунок 4.27.
,
гдеk
– коэффициент пропорциональности
магнитного потока и тока возбуждения
линейной части характеристики холостого
хода двигателя, см. рисунок 4.27.
Тормозные режимы двигателей: генераторное торможение (при ускорении двигателя); торможение противовключением; динамическое торможение (отключения якоря от сети и замыкание его на реостат), рисунок 4.28.
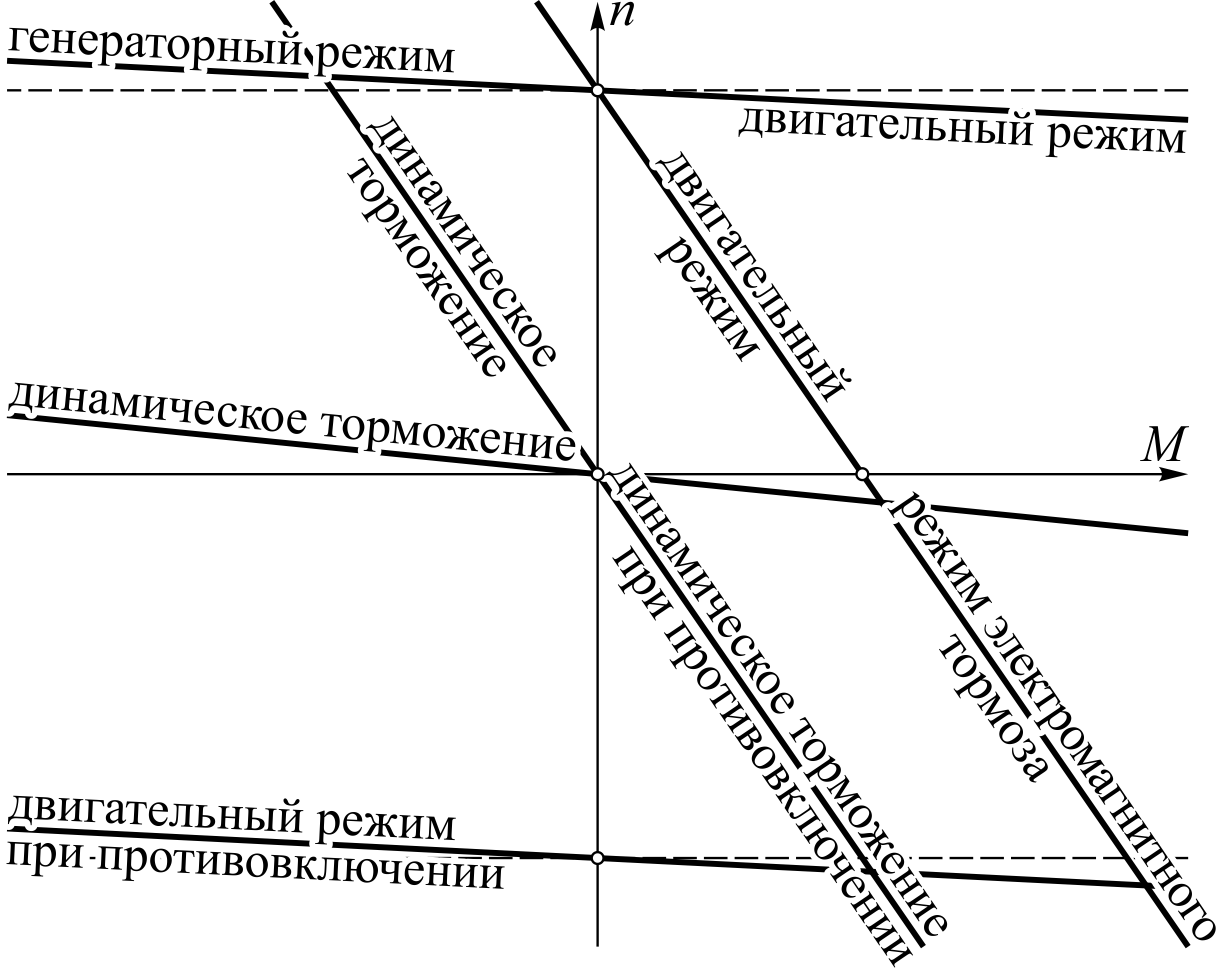
Рис. 4.28. Механические характеристики торможения двигателя параллельного возбуждения: 1 – естественная; 2 и 3 – при различных регулировочных сопротивлениях.