

2.10. Добавочные электромагнитные моменты
Наряду с основным электромагнитным моментом, возникающим в результате взаимодействия основной гармонической составляющей поля взаимной индукции с индуцированными в обмотке ротора, на ротор асинхронной машины действует ряд добавочных электромагнитных моментов различной физической природы, которые могут оказывать существенное влияние на механическую характеристику.
Асинхронные моменты по своей природе аналогичны основному электромагнитному моменту, но связаны с взаимодействием высших гармонических составляющих поля статора с токами, индуцированными ими в обмотке ротора. Асинхронные моменты вызывают искажение (провал) механической характеристики, что может затруднить процесс разгона двигателя при пуске и вызвать «застревание» ротора на малой частоте вращенияю Наибольшую опасность добавочные асинхронные моменты представляют при короткозамкнутой обмотке ротора. Эффективным средством ослабления асинхронных моментов при изолированной короткозамкнутой обмотке является скос пазов в пределах зубцового деления.
Синхронные
электромагнитные моменты
– это добавочные моменты, которые
возникают в результате взаимодействия
двух независимых высших гармоник
одинакового порядка, одна из которых
создана током статора
![]() частоты
частоты![]() ,
а вторая – током ротора
,
а вторая – током ротора![]() ,
изменяющимся с частотой
,
изменяющимся с частотой![]() .
Синхронные моменты менее опасны, чем
асинхронные, действуют при пуске в малом
диапазоне скольжений и могут быть легко
преодолены за счет кинетической
вращающегося ротора. Во избежание
значительных синхронных моментов
необходимо, чтобы
.
Синхронные моменты менее опасны, чем
асинхронные, действуют при пуске в малом
диапазоне скольжений и могут быть легко
преодолены за счет кинетической
вращающегося ротора. Во избежание
значительных синхронных моментов
необходимо, чтобы![]() и
и![]() ,
где
,
где![]() – количество пазов. Для ослабления
вредного влияния синхронных моментов
прибегают к скосу пазов ротора на
зубцовое деление.
– количество пазов. Для ослабления
вредного влияния синхронных моментов
прибегают к скосу пазов ротора на
зубцовое деление.
Реактивные
моменты
– это моменты, действующие на ферромагнитное
тело (ротор) в магнитном поле и стремящиеся
повернуть его в положение, соответствующее
наибольшей проводимости магнитной
цепи. Возникновение реактивных моментов
может быть вызвано двумя различными
причинами. Если числа зубцов статора и
ротора одинаковы,
![]() ,
то зубцы статора и ротора под воздействием
магнитного поля взаимной индукции
стремятся расположиться друг против
друга. Если число полюсов первой зубцовой
гармоники поля статора совпадает с
числом зубцов ротора, то зубцы ротора
стремятся расположиться против полюсов
первой зубцовой гармоники магнитного
поля статора.
,
то зубцы статора и ротора под воздействием
магнитного поля взаимной индукции
стремятся расположиться друг против
друга. Если число полюсов первой зубцовой
гармоники поля статора совпадает с
числом зубцов ротора, то зубцы ротора
стремятся расположиться против полюсов
первой зубцовой гармоники магнитного
поля статора.
Вихревой момент появляется в результате взаимодействия вихревых токов, индуцированных в теле магнитопровода, с главным магнитным полем.
Гистерезисный момент появляется вследствие гистерезиса стали магнитопровода ротора, который приводит к запаздыванию в перемагничивании ротора по отношению к полю, перемещающемуся относительно ротора.
2.11. Рабочие характеристики асинхронного двигателя
Рабочие
характеристики асинхронного двигателя
– это зависимости
![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() от полезноймеханической
мощности
от полезноймеханической
мощности
![]() при постоянных напряжении
при постоянных напряжении![]() и частоте
и частоте![]() .Типичные
рабочие характеристики асинхронного
двигателя представлены в относительных
единицах на рисунке.
.Типичные
рабочие характеристики асинхронного
двигателя представлены в относительных
единицах на рисунке.
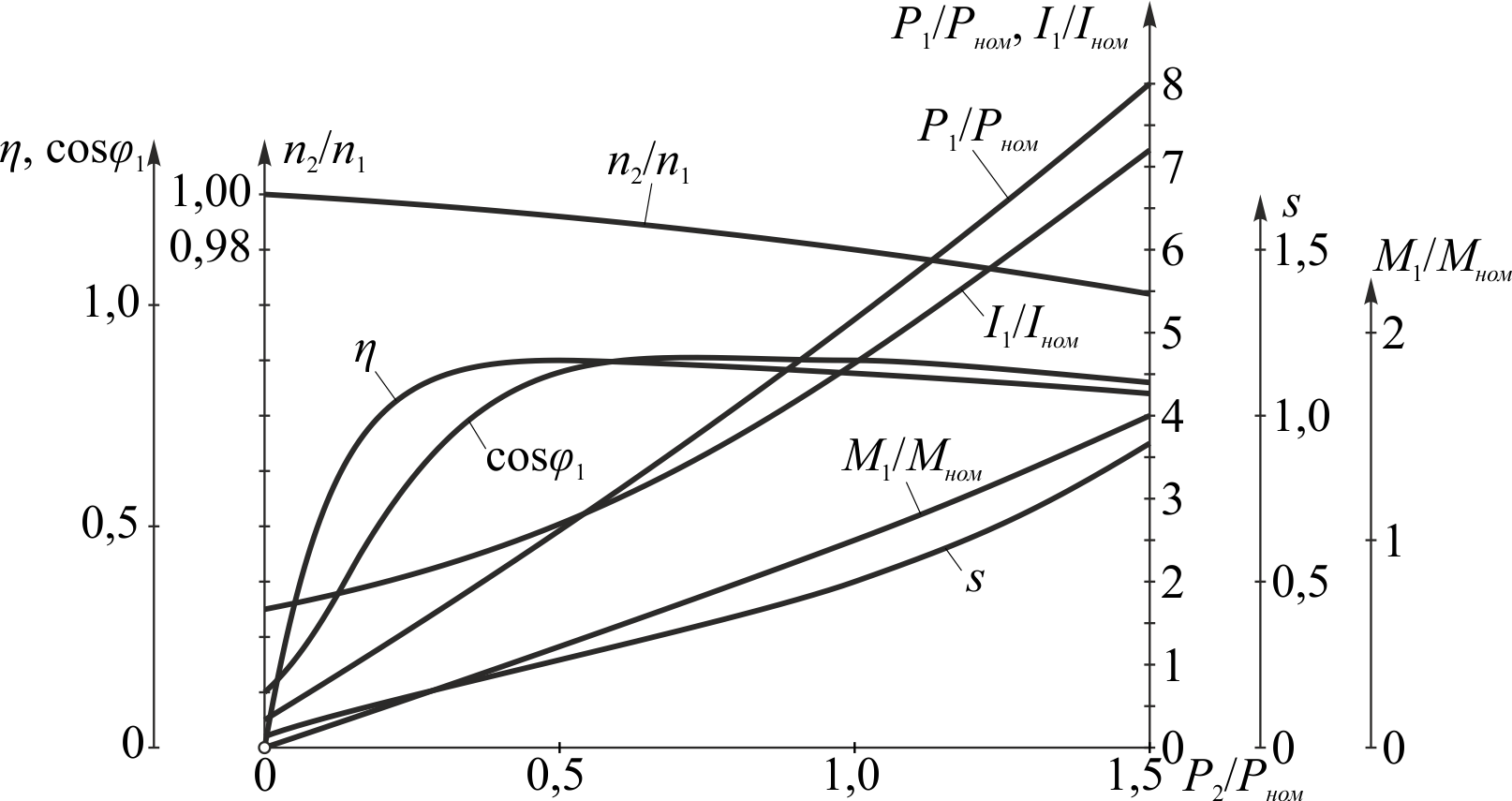
Рис. Рабочие характеристики асинхронного двигателя.
При
увеличении
нагрузки, характеризуемой механической
мощностью
![]() ,
изменяются ток
,
изменяются ток![]() и угол
и угол![]() .
Соответственно при увеличении
.
Соответственно при увеличении![]() коэффициент мощности
коэффициент мощности![]() изменяется от
изменяется от![]() при
при![]() до максимального
до максимального![]() .
Обычно максимальный коэффициент мощности
.
Обычно максимальный коэффициент мощности![]() наблюдается при токе, близком к
номинальному, который составляет
0,7–0,9. При уменьшении нагрузки до 0,5 он
снижается примерно на 0,1.
наблюдается при токе, близком к
номинальному, который составляет
0,7–0,9. При уменьшении нагрузки до 0,5 он
снижается примерно на 0,1.
Максимальный
КПД двигателя
![]() соответствует режиму, в которомпостоянные
потери (
соответствует режиму, в которомпостоянные
потери (![]() ,
,![]() ),
мало зависящие от нагрузки, равны
переменным потерям (
),
мало зависящие от нагрузки, равны
переменным потерям (![]() ,
,![]() ,
,![]() )
изменяющимся при нагрузке, что аналогично
трансформатору. Двигатель проектируется
таким образом, чтобы максимальный КПД
получался при некоторой недогрузке
)
изменяющимся при нагрузке, что аналогично
трансформатору. Двигатель проектируется
таким образом, чтобы максимальный КПД
получался при некоторой недогрузке![]() в пределах 0,5–1,0. Тогда в этом диапазоне
нагрузок КПД остается почти постоянным
и составляет для общепромышленных
двигателей 0,75–0,95.
в пределах 0,5–1,0. Тогда в этом диапазоне
нагрузок КПД остается почти постоянным
и составляет для общепромышленных
двигателей 0,75–0,95.
При
изменении нагрузки частота вращения
двигателя
![]() изменяетсянезначительно
от
изменяетсянезначительно
от
![]() до
до![]() ,
т.е. на несколько процентов. Поэтому
асинхронный двигатель обладает«жесткой»
механической характеристикой.
,
т.е. на несколько процентов. Поэтому
асинхронный двигатель обладает«жесткой»
механической характеристикой.
Скоростная
характеристика
![]() .
При увеличении полезной нагрузки на
валу
.
При увеличении полезной нагрузки на
валу![]() скольжение
скольжение![]() растет от нуля до
растет от нуля до![]() ,
составляющей 2–8 %. Поскольку
,
составляющей 2–8 %. Поскольку![]() ,
то скоростная характеристика имеет
небольшой наклон к оси абсцисс, ее форма
близка к прямолинейной.
,
то скоростная характеристика имеет
небольшой наклон к оси абсцисс, ее форма
близка к прямолинейной.
Зависимость
![]() определяется выражением
определяется выражением
 .
При
изменении полезной нагрузки на валу
.
При
изменении полезной нагрузки на валу![]() до номинальной частота вращения
до номинальной частота вращения![]() практически равна синхронной, поэтому
момент
практически равна синхронной, поэтому
момент
![]() практически прямопропорционален
мощности
практически прямопропорционален
мощности
![]() .
.
Зависимость
![]() .
Ток статора
.
Ток статора![]() всегда имеет реактивную (индуктивную)
составляющую, необходимую для создания
магнитного поля, поэтому коэффициент
мощности
всегда имеет реактивную (индуктивную)
составляющую, необходимую для создания
магнитного поля, поэтому коэффициент
мощности![]() асинхронных двигателей меньше единицы.
Наименьшее значение коэффициента
мощности соответствует режиму холостого
хода, когда
асинхронных двигателей меньше единицы.
Наименьшее значение коэффициента
мощности соответствует режиму холостого
хода, когда![]() и
и![]() ,
и обычно не превышает 0,2. При увеличении
нагрузки на валу двигателя растет
активная составляющая тока
,
и обычно не превышает 0,2. При увеличении
нагрузки на валу двигателя растет
активная составляющая тока![]() и коэффициент мощности возрастает,
достигая наибольшего значения 0,70–0,90
при нагрузке, близкой к номинальной.
Дальнейшее увеличение нагрузки приводит
к уменьшению
и коэффициент мощности возрастает,
достигая наибольшего значения 0,70–0,90
при нагрузке, близкой к номинальной.
Дальнейшее увеличение нагрузки приводит
к уменьшению![]() ,
что вызвано ростом индуктивного
сопротивления ротора.
,
что вызвано ростом индуктивного
сопротивления ротора.
КПД
асинхронного двигателя максимален
![]() в
режиме, при котором постоянные
потери (
в
режиме, при котором постоянные
потери (![]() ,
,![]() )
равны переменным потерям (
)
равны переменным потерям (![]() ,
,![]() ,
,![]() ).
Двигатель проектируется таким образом,
чтобы максимальный КПД получался при
некоторой недогрузке
).
Двигатель проектируется таким образом,
чтобы максимальный КПД получался при
некоторой недогрузке![]() в пределах 0,5–1,0. В этом диапазоне
нагрузок КПД остается почти постоянным
и составляет для общепромышленных
двигателей 0,75–0,95.
в пределах 0,5–1,0. В этом диапазоне
нагрузок КПД остается почти постоянным
и составляет для общепромышленных
двигателей 0,75–0,95.