

MetodTM1
.pdfrτ |
τ |
= eAC × AC , направлен |
aAC , модуль которого вычисляется по формуле |
aAC |
|
перпендикулярно отрезку АС. |
|
|
На данном этапе величина вектора касательного ускорения не может быть |
||
вычислена, поскольку угловое ускорение шатуна |
АС |
εAC неизвестно. На |
|
rτ |
|
рис. 2.17 направление вектора касательного ускорения aAC выбрано из предпо-
ложения, что вращение шатуна ускоренное и направление углового ускорения совпадает с направлением его угловой скорости.
Направление вектора aA ускорения точки А определяется из того, что центр барабана движется по прямой, параллельной горизонтальной поверхно-
сти качения. На рис. 2.17 направление вектора ускорения aA выбрано из пред-
положения, что качение барабана ускоренное.
|
|
|
|
Выберем |
ось |
х |
|
вдоль линии |
АС |
|||||
|
|
|
|
(рис. 2.18) |
и |
спроектируем |
векторное |
ра- |
||||||
|
|
|
|
венство |
r |
|
|
r |
r |
τ |
|
r |
на эту |
ось. |
|
|
|
|
a |
A |
= a |
+ a |
+ an |
||||||
|
|
|
|
|
|
|
C |
|
AC |
|
AC |
|
|
|
|
|
|
|
При таком выборе оси проекция неизвест- |
||||||||||
|
|
|
|
|
|
|
|
|
rτ |
|
|
|
|
|
|
|
|
|
ного ускорения aAC обращается в нуль. |
||||||||||
Рис. 2.18. Схема для определения |
Получим |
|
a |
A |
cos30o |
= a |
|
cos60o - an . |
От- |
|||||
|
|
|
|
|
C |
|
AC |
|
||||||
|
ускорения центра барабана |
сюда найдём |
ускорение центра барабана |
|||||||||||
|
|
|
|
|||||||||||
aA = |
1 |
(aC cos60o − aACn ) = – 122,4 м/с2. Отрицательное значение ускорения |
||||||||||||
|
cos30o |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
точки А означает, что на рис. 2.17 – 2.18 вектор ускорения aA |
должен иметь |
|||||||||||||
противоположное направление. Таким образом, вектор ускорения aA направлен в сторону, противоположную вектору скорости VA , и движение барабана замед-
ленное.
Для того, чтобы найти ускорение точки В, выразим его |
через полюс А на |
|||
r |
r |
rτ |
rn |
aA – ускорение |
основании векторного равенства: aB = aA + aBA + aBA , где |
||||
50

|
|
|
|
rτ |
rn |
касательная и нормальная |
точки А, выбранной в качестве полюса; aBA , |
aBA – |
|||||
составляющие ускорения точки В при вращении барабана вокруг полюса А. |
||||||
|
Модуль |
вектора нормального ускорения |
r |
|||
|
aBAn равен по величине |
|||||
an |
= w2 × BA = (10 |
|
|
|||
3)2 × R = 150 м/с2. Вектор направлен вдоль радиуса бараба- |
||||||
BA |
1 |
|
|
|
|
|
на от точки В к полюсу А (рис. 2.17). |
|
|
||||
|
|
|
|
|
rτ |
вычисляется по формуле |
|
Модуль вектора касательного ускорения aBA |
|||||
aτ |
= e × BA, |
где e |
– угловое ускорение барабана. Значение углового ускоре- |
|||
BA |
1 |
1 |
|
|
|
|
ния катящегося барабана (в отличие от углового ускорения eAC шатуна АС)
может быть найдено. Расчёт основан на том, что при движении барабана рас-
стояние АР1 от точки А до центра скоростей барабана Р1 остаётся постоянным,
равным r. Тогда выражение VA = w1 × AP1 = w1 × r для расчёта скорости точки А можно продифференцировать. Получим dVdtA = ddtω1 × r . Так как точка А движет-
ся по прямой, производная от скорости точки равна её полному ускорению, а
производная от угловой скорости барабана равна его угловому ускорению. То-
гда имеем aA = e1 × r , откуда находим угловое ускорение e1 = arA = 40,8 рад/с2, а
затем и модуль вектора касательного ускорения aBAτ = e1 × BA= 20,4 м/с2.
Заметим, что для вычисления углового ускорения eAC шатуна АС, подоб-
ные рассуждения неприменимы. Формулу VA = wAC × AP2 невозможно продиф-
ференцировать, так как при движении механизма расстояние АР2 от точки А до центра скоростей Р2 шатуна АС является неизвестной функцией времени.
Выберем систему координат хВу как показано на рис. 2.17 и спроецируем
r = r + rτ + rn
на эти оси векторное равенство aB aA aBA aBA . Полагая, что движение ба-
рабана ускоренное (т.е. вектора ускорений a и rτ направлены как показано на
A aBA
рис. 2.17), получим значения составляющих ускорения точки В: aBx = aA + aBAn ,
51
aBy = aBAτ . Подставляя значения ускорений, найдём aBy = 20,4 м/с2, aBx = −122,4 + 150 = 27,6 м/с2. Вектор полного ускорения точки В направлен по диагонали прямоугольника, построенного на векторах aBx , aBy . Величина уско-
рения точки В aB = 
 aBx2 + aBy2 = 34,32 м/с2.
aBx2 + aBy2 = 34,32 м/с2.
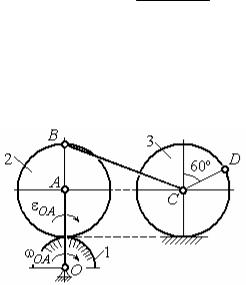
Задача 2. В плоском механизме (рис. 2.19) кривошип ОА вращается во-
круг оси О с угловой скоростью wOA и угловым ускорением eOA . Диск 2, шар-
нирно присоединённый к кривошипу в точке А, катится без проскальзывания по неподвижному диску 1. Радиусы дисков R1 и R2 . На краю диска 2 в точ-
ке В шарнирно прикреплен стержень
Рис. 2.19. Схема движения плоского ВС, соединенный с центром С диска 3.
механизма
Радиус диска 3 равен радиусу диска 2:
R3 = R2 . Диск 3 катится без скольжения вдоль горизонтальной прямой. Для положения механизма, изображенного на рис. 2.19, определить ускорение точки D и угловое ускорение стержня ВС, если: wOA = 4 рад/с, eOA = 2 рад/с2, R1 = 4 см, R2 = 8 см. Длина стержня ВС = 20 см.
Решение
Определение угловых скоростей звеньев механизма.
Рассмотрим вращательное движение кривошипа ОА. Скорость точки А:
VA = wOA × OA= 48 см/с. Вектор скорости VA направлен перпендикулярно кри-
вошипу ОА в сторону движения кривошипа (рис. 2.20).
При движении диска 2 точка P2 соприкосновения второго диска с непод-
вижным первым является мгновенным центром скоростей диска 2. Угловая
52

скорость |
диска 2: |
w2 = |
VA |
|
= |
|
48 |
|
= |
6 рад/с. Cкорость точки |
|
В диска 2: |
||||||||||
AP2 |
8 |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
VB = w2BP2 = 6·16 = 96 см/с. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Для определения угловой скорости |
|
|
|
|
|
|
|
|
|
|
|||||||||||
стержня ВС заметим, что скорости двух |
|
|
|
|
|
|
|
|
|
|
||||||||||||
точек стержня VB и VC параллельны, |
но |
|
|
|
|
|
|
|
|
|
|
|||||||||||
точки В и С не лежат на общем перпен- |
|
|
|
|
|
|
|
|
|
|
||||||||||||
дикуляре к скоростям. В этом случае |
|
|
|
|
|
|
|
|
|
|
||||||||||||
мгновенный |
центр |
скоростей |
стержня |
|
Рис. 2.20. Расчетная схема |
|
||||||||||||||||
ВС отсутствует (бесконечно удалён), уг- |
для определения угловых скоростей |
|||||||||||||||||||||
|
|
|
звеньев механизма |
|
|
|||||||||||||||||
ловая скорость стержня равна нулю: wBC = 0, а |
стержень |
совершает мгновен- |
||||||||||||||||||||
ное поступательное движение. В результате, VC = VB = 96 см/с. |
|
|
|
|
||||||||||||||||||
|
При качении диска 3 по неподвижной поверхности без проскальзывания |
|||||||||||||||||||||
точка P3 |
касания его с поверхностью является мгновенным центром скоростей. |
|||||||||||||||||||||
Тогда угловая скорость диска 3: w = |
VC |
= 12 рад/с. Скорость точки D диска 3: |
||||||||||||||||||||
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
3 |
|
CP3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VD = w3 × DP3 . |
Величину DP3 |
находим из треугольника |
P3DC . В результате, |
|||||||||||||||||||
DP = 2R cos30o = 13,8 см и V |
D |
= 165,6 см/с. Вектор скорости V |
направлен в |
|||||||||||||||||||
|
3 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
сторону движения диска 3 перпендикулярно линии DP3 и (рис. 2.20). |
|
|
||||||||||||||||||||
|
Определение ускорений точек механизма. |
|
|
|
|
|
|
|
|
|||||||||||||
|
Представим |
ускорение |
|
|
aC |
точки |
|
|
С |
векторной |
|
суммой: |
||||||||||
r |
r |
rn |
rτ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aC |
= aB |
+ aCB + aCB , где aB – ускорение точки В, выбранной в качестве полю- |
||||||||||||||||||||
|
rn |
rτ |
– нормальная и касательная составляющие ускорения точки С |
|||||||||||||||||||
са; aCB , |
aCB |
|||||||||||||||||||||
при вращении стержня ВС вокруг полюса В, |
an |
|
= w2 |
× CB , aτ |
|
= e |
CB |
× CB . |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CB |
|
CB |
CB |
|
|
|||
Нормальная составляющая ускорения точки С aCBn |
= 0, так как стержень СВ со- |
|||||||||||||||||||||
вершает мгновенное поступательное движение и wBC = 0. |
|
|
|
|
|
|||||||||||||||||
53
|
rτ |
неизвестно, так как неиз- |
|
Направление касательной составляющей aCB |
|||
|
вестно направление углового уско- |
||
|
рения стержня eCB . Для определён- |
||
|
ности, выберем направление углово- |
||
|
го ускорения стержня ВС в сторону |
||
|
против |
хода |
часовой стрелки. |
|
На рис. 2.21 |
это направление пока- |
|
|
зано дуговой стрелкой eCB . В соот- |
||
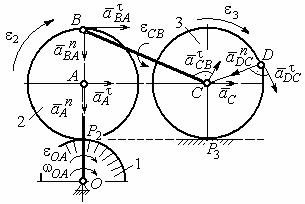
Рис. 2.21. Расчетная схема |
ветствии с выбранным направлени- |
||
для определения ускорений точек меха- |
|
|
rτ |
низма и угловых ускорений его звеньев |
|
|
|
ем углового ускорения вектор aCB |
|||
строится перпендикулярно линии стержня ВС в сторону углового ускорения
eCB (см. рис. 2.21). |
|
|
|
|
|
|
|
r |
r |
rn |
rτ |
Выразим ускорение точки В через полюс А: aB |
= aA + aBA + aBA , где aA – |
||||
rn |
rτ |
– нормальная и касательная |
составляющие ус- |
||
ускорение полюса А; aBA , |
aBA |
||||
корения точки В при вращении диска 2 вокруг полюса А. Величина нормальной
составляющей ускорения точки В aBAn |
= w22 |
r |
× BA = 288 см/с2. Вектор aBAn направ- |
лен вдоль радиуса ВА от точки В к полюсу А (рис. 2.21). Касательное ускорение
точки В при вращении диска 2 |
вокруг полюса А вычисляется по формуле |
|||||||||||||||
aBAτ |
= e2 × BA . Для определения углового ускорения e2 диска 2 заметим, что во |
|||||||||||||||
время движения диска 2 расстояние АР2 остается постоянным, равным R2. Диф- |
||||||||||||||||
ференцируя |
равенство V |
A |
= w |
2 |
× AP = w |
R , получим: |
dVA |
= |
dω2 |
R , или |
||||||
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
2 2 |
dt |
|
dt |
2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
aτ = e |
R , откуда ε |
2 |
= |
aAτ |
. aτ . |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||||||||
A |
|
2 2 |
|
|
R2 |
|
A |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Для того, чтобы найти величину aτA рассмотрим вращательное движение кривошипа ОА вокруг неподвижной оси О. Ускорение точки А представляется в
54

|
|
|
r |
rn |
rτ |
rn |
rτ |
– известные нормальная и |
||
виде векторного равенства aA = aA |
+ aA , где |
aA |
и aA |
|||||||
касательная |
составляющие |
|
ускорения |
|
точки |
А кривошипа ОА, |
||||
an |
= w2 |
× OA = 192 см/с2, aτ |
= e |
OA |
× OA = 24 см/с2. Направления векторов нор- |
|||||
A |
OA |
|
A |
|
|
|
|
|
|
|
|
|
|
rn |
|
|
|
|
|
rτ |
показаны на рис. 2.21. |
мального ускорения aA и касательного ускорения |
aA |
|||||||||
Теперь найдём величину углового уско-
aτ
рения диска 2 e2 = A = 3 рад/с2 и мо-
R2
дуль касательного ускорения aBAτ точки |
|
|||||
В при вращении диска 2 вокруг полю- |
|
|||||
са А: aBAτ = e2 × BA = 24 см/с2. |
|
|||||
|
Для определения ускорения точки |
|
||||
С |
имеем |
векторное |
равенство: |
Рис. 2.22. Расчетная схема для вычисления |
||
r |
rn |
rτ |
rn rτ |
rτ |
||
ускорения точки С |
||||||
aC |
= aA + aA + aBA + aBA + aCB . Выберем |
|||||
оси Сx, Сy, как показано на рис. 2.22, – вдоль отрезка ВС и перпендикулярно ему и спроецируем на них имеющееся векторное равенство. Получим
aCcosα = anAsina + aτAcosa + aBAn sina + aBAτ cosa , aCsinα = anAcosa+ aτAsina + aBAn cosa + aBAτ sina + aCBτ ,
где |
α – угол между стержнем ВС и линией центров АС, sina = |
AB |
= 0,4; |
||||
|
|||||||
|
|
|
|
|
|
BC |
|
cosα = 0,92 . Решая систему найдём aC = 256,7 см/с2, aCBτ |
|
= – 358,12 см/с2. |
|||||
|
Модуль углового ускорения стержня ВС: eCB = |
|
aCBτ |
|
= 17,9 рад/с2. |
||
|
|
|
|||||
|
|
|
|
||||
|
|
BC |
|
||||
|
|
|
|
|
|
|
|
|
Знак «минус» величины aCBτ означает, что вектор касательного ускорения |
||||||
rτ |
на рис. 2.21 – 2.22 следует направить в противоположную сторону. На- |
||||||
aCB |
|||||||
правление углового ускорения стержня ВС, показанное на рис. 2.21 дуговой стрелкой εCB , также следует заменить на противоположное.
55

|
r |
r |
rn |
rτ |
Выразим ускорение точки D через полюс С: aD = aC + aDC + aDC , где |
||||
rn |
rτ |
|
|
|
aC – известное ускорение точки С; aDC , |
aDC – нормальное и касательное со- |
|||
ставляющие ускорения точки D при вращении диска 3 вокруг полюса С. Вели- |
||||
чина нормального ускорения точки D: an |
= w2 × DC = 1152 см/с2. Вектор уско- |
|||
DC |
3 |
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рения aDCn направлен по радиусу от точки D к полюсу С (рис.2.23). Для расчёта |
|||||||||||||||||||||
|
касательной составляющей aDCτ |
ускорения точки |
|||||||||||||||||||
|
D найдём угловое ускорение диска 3. Продиффе- |
||||||||||||||||||||
|
ренцируем по времени равенство VC = w3 × CP3 = |
||||||||||||||||||||
|
w |
R . Получим: |
|
dVC |
|
= |
dω3 |
R , |
или |
a |
C |
= ε |
R . |
||||||||
|
|
|
|
|
|||||||||||||||||
|
|
|
3 3 |
|
|
|
|
dt |
|
|
|
dt |
3 |
|
|
|
|
|
3 3 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис.2.23. Расчетная схема |
Угловое |
ускорение |
|
диска 3: |
|
ε3 = |
aC |
= |
32,09 |
||||||||||||
|
|
|
|||||||||||||||||||
для определения ускоре- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R3 |
|
|
|
||
ния точки D |
рад/с2. Тогда величина касательной |
составляю- |
|||||||||||||||||||
τ |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
rτ |
|
щей ускорения точки D: aDC = e3 × DC = 256,7 см/с |
. Направление вектора aDC |
||||||||||||||||||||
соответствует ускоренному движению диска 3. Проведём оси Dx и Dy |
как по- |
||||||||||||||||||||
казано на рис. 2.23 и спроецируем |
векторное равенство ускорения точки D на |
||||||||||||||||||||
оси: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aDx = -aC + aDCn cos30o - aDCτ cos60o , aDy = aDCn |
cos60o + aDCτ cos30o . |
|
|
||||||||||||||||||
Решая систему, находим |
значения |
проекций модуля |
ускорения |
||||||||||||||||||
aDx = 612,5 см/с2, aDy = 798,3 см/с2. Величина ускорения точки D: |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
aD = |
|
aDx2 |
+ aDy2 |
|
= 1006,2 см/с2. |
|
|
|
|
|
|
|
|
||||||||
56

3.СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
3.1.Основные понятия сложного движения точки
Рассматривается подвижное твердое тело и точка, перемещающаяся отно-
сительно тела.
Траектория точки в её движении относительно тела называется
относительной траекторией. Скорость точки в этом движении называют
относительной скоростью, ускорение – относительным ускорением.
Траектория точки, перемещающейся вместе с телом, называется перенос-
ной траекторией точки, скорость точки при таком её движении – переносной скоростью, а ускорение – переносным ускорением.
Суммарное движение точки вместе с телом и относительно тела называ-
ется сложным движением. Траектория точки относительно неподвижной сис-
темы координат называется абсолютной траекторией точки, скорость и уско-
рение – абсолютной скоростью и абсолютным ускорением.
При вычислении абсолютной скорости используется теорема о сложении скоростей: при сложном движении абсолютная скорость точки равна гео-
метрической сумме относительной и переносной скоростей V = Ve + Vr , где
V , Ve , Vr – вектора абсолютной, переносной и относительной скоростей точки.
В случае, когда относительное движение точки задается естественным способом в виде закона изменения пути S = S(t) , величина относительной ско-
рости точки равна модулю производной: Vr = S&r . Если переносное движение точки есть вращение тела вокруг неподвижной оси, скорость точки в перенос-
ном движении будет: Ve = ωehe , где ωe – величина угловой скорости вращения тела, he – кратчайшее расстояние от места положения точки на теле до оси вращения тела.
57
При вычислении абсолютного ускорения используется теорема Кориоли-
са о сложении ускорений: при сложном движении абсолютное ускорение
точки равно геометрической сумме трех ускорений – относительного, пе-
реносного и ускорения Кориолиса a = ae + ar + aк , где a – вектор абсолютного ускорения точки; ae , ar –
вектора, соответственно, переносного
|
и |
относительного ускорений точки; |
||
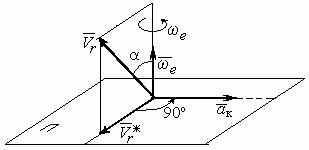
Рис. 3.1. Определение направления |
aк |
– вектор |
ускорения Кориолиса. |
|
ускорения Кориолиса по правилу |
(Иногда его называют поворотным |
|||
Жуковского |
||||
|
|
|
||
|
ускорением.) |
Вектор ускорения Ко- |
||
|
|
r |
r |
|
риолиса определяется векторным произведением aк = 2(ωe ×Vr ), где ωe – век- |
||||
тор угловой скорости переносного движения; Vr – вектор относительной скоро-
сти точки. Модуль ускорения Кориолиса равен: |
r |
= 2 |
r |
× |
|
Vr |
|
sina , где α |
– |
|
|
||||||||
aк |
we |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
угол между вектором угловой скорости переносного движения и вектором от-
носительной скорости точки (см. рис. 3.1). Направление вектора ускорения Ко-
риолиса может быть получено по правилу построения вектора векторного про-
изведения.
На рис. 3.1 показан способ выбора направления вектора ускорения Ко-
риолиса по правилу Н. Е. Жуковского. Правило состоит в следующем: пусть имеется точка, движущаяся с относительной скоростью Vr . Построим плоскость
П, перпендикулярную вектору переносной угловой скорости ωe , и спроецируем вектор Vr на эту плоскость. Проекцию обозначим Vr (см. рис. 3.1). Чтобы по-
лучить направление ускорения Кориолиса, следует вектор проекции относи-
тельной скорости Vr повернуть на 90° в плоскости П вокруг оси переносного вращения в направлении этого вращения.
58
Если сложное движение точки происходит в плоскости, перпендикуляр-
ной оси переносного вращения, направление ускорения Кориолиса можно по-
лучить простым поворотом вектора относительной скорости на угол 90° вокруг
оси переносного вращения в направлении этого вращения.
Относительное ускорение ar представляется как сумма векторов относи-
тельного |
касательного arτ |
|
и относительного |
нормального |
r |
|||||||||||||
|
arn ускорений: |
|||||||||||||||||
ar |
= arτ + arn . Переносное ускорение точки ae тела имеет своими составляющи- |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
rτ |
и переносное нормальное |
rn |
|
||||
ми переносное касательное ae |
|
ae ускорения так, что |
||||||||||||||||
r |
|
r |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
e |
= aτ + an . |
|
|
|
|
|
|
|
|
|
|
||||||
|
e |
e |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Таким образом, абсолютное ускорение точки в сложном движении можно |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
r |
r |
r |
r |
r |
представить в виде векторного равенства a = arτ + arn + aeτ |
+ aen + aк . |
|||||||||||||||||
|
|
Модули относительного касательного |
и относительного нормального ус- |
|||||||||||||||
корений |
при естественном способе задания относительного движения точки |
|||||||||||||||||
равны: aτ |
= |
|
V& |
|
, |
an = |
Vr2 |
, |
где ρ – радиус кривизны относительной траекто- |
|||||||||
|
|
|||||||||||||||||
|
|
|
||||||||||||||||
|
|
|
r |
|
|
r |
|
|
r |
ρ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
рии. (При движении точки по окружности радиус кривизны равен радиусу ок-
ружности, при движении по прямой – бесконечности и в этом случае arn = 0 .)
Значения переносного касательного и нормального ускорений при вращатель-
ном |
переносном |
движении точки вычисляются по формулам: aτ = ε |
h , |
|||
|
|
|
|
|
e |
e e |
an = ω2h , |
где ε |
e |
– угловое ускорение вращательного переносного движения, |
|||
e |
e |
e |
|
|
|
|
εe = |
ωe |
, he – расстояние от точки до оси вращения тела; ωe – величина угло- |
||||
|
& |
|
|
|
|
|
|
|
|
|
|
|
|
вой скорости вращения тела. Вектора ускорений строятся по общим правилам построения векторов нормального и касательного ускорений.
При поступательном переносном движении по прямой ωe = 0 . В резуль-
тате ускорение Кориолиса и переносное нормальное ускорение равны нулю: aк = 0, aen = 0 .
59