

MetodTM1
.pdfСкорость любой точки М плоской фигуры равна векторной сумме векто-
ра скорости точки-полюса и вектора скорости точки М при вращении тела во-
круг этого полюса: VМ =VА + VМА, где VМ – скорость точки М; VА – скорость полюса А; VМА – вектор скорости точки М при вращении тела вокруг полюса А,
модуль скорости VМА = w × МА , где ω – угловая скорость мгновенного враща-
тельного движения тела вокруг полюса; МА – расстояние между полюсом А и
точкой М.
Мгновенным центром скоростей называется такая точка Р плоской фи-
гуры, скорость которой в данный момент времени равна нулю. Выбрав в каче-
стве полюса мгновенный центр скоростей, скорость любой точки плоской фи-
гуры находят так, как если бы мгновенное движение фигуры было вращатель-
ным вокруг мгновенного центра скоростей.
Способы построения мгновенного центра скоростей
1. Если известны направления скоростей VA и VB каких-нибудь двух то-
чек А и В плоской фигуры, то мгновенный центр скоростей находится в точке пересечения перпендикуляров, восстановленных из этих точек к векторам ско-
ростей (рис. 2.1, а).
2. Если скорости VA и VB двух точек А и В плоской фигуры известны и параллельны друг другу, а линия АВ перпендикулярна VA (и, конечно, VB ), то мгновенный центр скоростей определяется как точка пересечения линий, про-
веденных через основания и вершины векторов скоростей (построение показано на рис. 2.1, b, c).
3. Если скорости VA и VB двух точек А и В параллельны друг другу, но линия АВ, соединяющая эти точки, не перпендикулярна к векторам скоростей
(рис. 2.1, d), то мгновенная угловая скорость тела равна нулю и движение тела в
30

данный момент времени является мгновенным поступательным. В этом случае скорости всех точек равны по величине и направлению.
Рис. 2.1. Способы построения мгновенного центра скоростей
4. Если плоскопараллельное движение осуществляется путем качения без скольжения одного тела по неподвижной поверхности другого, то мгновенный центр скоростей расположен в точке касания катящегося тела с неподвижной поверхностью (рис. 2.1, e).
Ускорение любой точки М плоской фигуры при плоскопараллельном движении твердого тела представляется как сумма векторов – ускорения полю-
са и ускорения точки М при вращении фигуры вокруг полюса. Учитывая, что ускорение точки вращающегося тела представляется как сумма нормального и касательного ускорений, получим
r |
r |
r |
|
r |
aM |
= aA + aMAτ |
+ aMAn , |
||
где aA – ускорение полюса А; |
rτ |
rn |
– касательная и нормальная состав- |
|
aMA , |
aMA |
|||
ляющие ускорения точки М при вращении фигуры вокруг полюса А.
31

r |
|
Вектор нормального ускорения aMAn всегда направлен от точки М к по- |
|
rτ |
направлен перпендикулярно от- |
люсу А. Вектор касательного ускорения aMA |
|
резку АМ в сторону вращения, если оно ускоренное (рис. 2.2, а), и против вра-
щения, если оно замедленное (рис. 2.2, b). |
|
||||||||
Численно величины касательного и нормаль- |
|
||||||||
ного составляющих ускорения точки М опре- |
|
||||||||
деляются по формулам: |
|
|
|
|
|
||||
|
aMAτ |
= e × AM , aMAn = w2 × AM , |
|
|
|||||
где ω , |
ε – угловая скорость и угловое ускоре- |
|
|||||||
ние тела (плоской фигуры); |
АМ – |
расстояние |
|
||||||
от точки М до полюса А (см. рис. 2.2). |
|
|
|
||||||
Если при движении плоской фигуры |
из- |
Рис. 2.2. Ускорение точки плоской |
|||||||
вестны траектории движения полюса А и точ- |
фигуры: |
||||||||
а – ускоренное движение; |
|||||||||
|
|
|
|
|
|
|
|
||
ки М, то для определения ускорения точки М |
b – замедленное движение |
||||||||
используется векторное равенство: |
|
|
|
|
|||||
|
|
|
rτ |
rn |
rτ |
rn |
rτ |
rn |
|
|
|
|
aM |
+ aM = |
aA |
+ aA |
+ aMA + aMA , |
||
rτ |
rn |
rτ |
rn |
|
|
|
|
|
|
где aM |
, aM , |
aA , |
aA – касательная и нормальная составляющие ускорения точ- |
||||||
ки М и полюса А при движении их по заданным траекториям.
2.4. Задание К1. Определение скоростей и ускорений точек твердого тела при поступательном и вращательном движениях
По заданному движению одного из звеньев механизма x1 = x1(t), или
ϕ1 = ϕ1(t) найти в момент времени t1 скорость, касательное, нормальное и пол-
ное ускорения точки М звена механизма, совершающего вращательное движе-
ние, а также скорость и ускорение звена 4, совершающего поступательное дви-
жение.
32

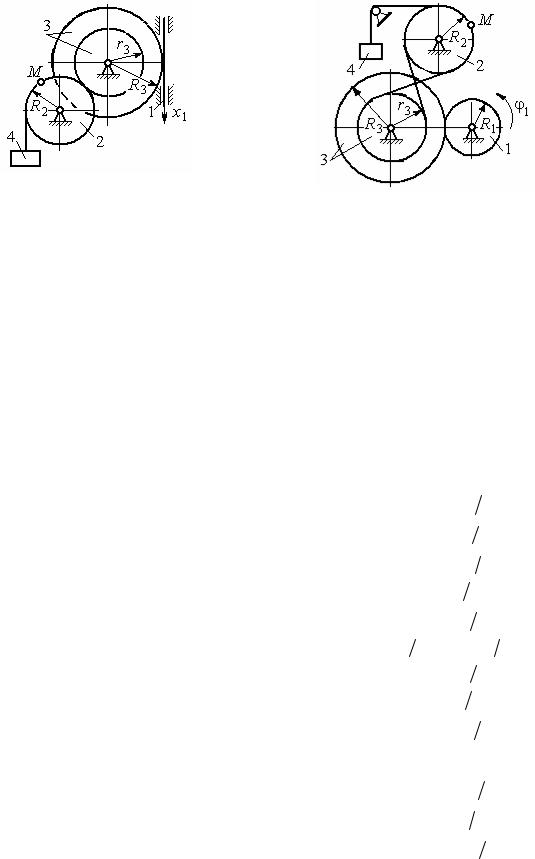
Варианты заданий даны на рис. 2.3 – 2.4. Исходные данные представлены
в табл. 2.1.
Варианты № 1, 11, 21 |
Варианты № 2, 12, 22 |
Варианты № 3, 13, 23 |
|
|
|
|
|
|
Варианты № 4, 14, 24 |
Варианты № 5, 15, 25 |
Варианты № 6, 16, 26 |
|
|
|
|
|
|
Варианты № 7, 17, 27 |
Варианты № 8, 18, 28 |
|
|
|
|
Рис. 2.3. Задание К1. Определение скоростей и ускорений точек при поступательном и вращательном движениях твёрдого тела.
Номера вариантов задания 1 – 8, 11 – 18, 21 – 28
33
|
Окончание вариантов задания К1 |
Варианты № 9, 19, 29 |
Варианты № 10, 20, 30 |
|
|
|
|
Рис. 2.4. Задание К1. Определение скоростей и ускорений точек при поступательном и вращательном движениях твёрдого тела.
Номера вариантов задания 9 – 10, 19 – 20, 29 – 30
Таблица 2.1
Исходные данные вариантов задания К1. Определение скоростей и ускорений точек при поступательном
и вращательном движениях твёрдого тела
|
|
|
|
|
|
|
|
|
|
|
|
|||
Номер |
R ,см |
R |
2 |
, см |
R , см |
r , см |
x1(t) , см |
|
|
|
t1, c |
|||
варианта |
1 |
|
|
3 |
3 |
ϕ1(t) , рад |
|
|
|
|||||
задания |
|
|
|
|
|
|
|
|
|
|||||
1 |
– |
|
40 |
45 |
35 |
x1(t) = (3t −1)2 |
|
|
2 |
|||||
2 |
10 |
|
20 |
38 |
18 |
ϕ1(t) = t 2 + 6cos(πt |
6) |
|
3 |
|||||
3 |
– |
|
30 |
42 |
18 |
x1(t) =5t 2 − 2cos(πt |
2) |
|
1 |
|||||
4 |
15 |
|
30 |
45 |
20 |
ϕ1(t) = 5t 2 + cos(πt |
2) |
|
2 |
|||||
5 |
– |
|
30 |
40 |
20 |
x1(t) = 6t |
− |
|
|
π |
|
|
3 |
|
|
|
|
|
|
|
|
|
cos( t 3) |
|
|
||||
6 |
10 |
|
20 |
30 |
10 |
ϕ1(t) = t3 − cos(πt |
2) |
|
1 |
|||||
7 |
– |
|
30 |
40 |
30 |
π |
|
|
+ |
|
π |
2) |
2 |
|
|
|
|
|
|
|
|
x1(t) =2sin( t 2) |
|
cos( t |
|
||||
8 |
8 |
|
10 |
30 |
25 |
ϕ1(t) = 5t + cos(πt |
2) |
|
2 |
|||||
9 |
– |
|
18 |
30 |
18 |
x1(t) =5t + cos(π t 3) |
|
3 |
||||||
10 |
15 |
|
30 |
50 |
20 |
ϕ1(t) = 2t 2 + sin(πt |
4) |
|
2 |
|||||
11 |
– |
|
30 |
40 |
25 |
x1(t) = (t2 − 3t) |
|
|
2 |
|||||
12 |
12 |
|
20 |
40 |
28 |
ϕ1(t) = 3t 2 + 6sin(πt 6) |
|
3 |
||||||
13 |
– |
|
25 |
60 |
42 |
x1(t) = 2t 2 + cos(πt |
2) |
|
1 |
|||||
14 |
10 |
|
30 |
45 |
30 |
ϕ1(t) = 3t 2 + 2cos(πt 2) |
|
2 |
||||||
34

|
|
|
|
|
|
|
|
Окончание табл. 2.1 |
|||||
Номер |
R ,см |
R |
2 |
, см |
R , см |
r , см |
x1(t) , см |
|
|
|
t1, c |
||
варианта |
1 |
|
|
3 |
3 |
ϕ1(t) , рад |
|
|
|
||||
задания |
|
|
|
|
|
|
|
|
|
||||
15 |
– |
|
20 |
30 |
20 |
x1(t) =3t 2 − cos(πt |
3) |
|
3 |
||||
16 |
12 |
|
18 |
40 |
20 |
ϕ1(t) = 2t 3 + cos(πt |
2) |
|
1 |
||||
17 |
– |
|
20 |
35 |
15 |
π |
2) |
− |
|
π |
2) |
2 |
|
|
|
|
|
|
|
|
x1(t) =2sin( t |
|
cos ( t |
|
|||
18 |
15 |
|
18 |
40 |
25 |
ϕ1(t) = 5t + cos(πt |
2) |
|
1 |
||||
19 |
– |
|
22 |
50 |
18 |
x1(t) =t 2 + cos(π t 3) |
|
3 |
|||||
20 |
10 |
|
20 |
45 |
10 |
ϕ1(t) = 2t 2 + sin(πt |
4) |
|
4 |
||||
21 |
– |
|
20 |
40 |
20 |
x1(t) =t + (3t − 4)2 |
|
2 |
|||||
22 |
8 |
|
18 |
42 |
18 |
ϕ1(t) = 2t 2 +12cos(πt 6) |
3 |
||||||
23 |
– |
|
45 |
60 |
40 |
x1(t) = 4t 2 + sin(πt 2) |
|
1 |
|||||
24 |
5 |
|
15 |
30 |
20 |
ϕ1(t) = 2t 2 + 4cos(πt 2) |
|
2 |
|||||
25 |
– |
|
15 |
35 |
25 |
x1(t) = 2t 2 + cos(πt |
3) |
|
3 |
||||
26 |
18 |
|
20 |
35 |
20 |
ϕ1(t) = 2t 3 + sin(πt |
2) |
|
1 |
||||
27 |
– |
|
15 |
35 |
15 |
π |
2) |
− |
|
π |
2) |
1 |
|
|
|
|
|
|
|
|
x1(t) =2sin( t |
|
cos ( t |
|
|||
28 |
10 |
|
12 |
40 |
25 |
ϕ1(t) = 2t 2 + cos(π t |
2) |
|
1 |
||||
29 |
– |
|
35 |
50 |
10 |
x1(t) =t3 − cos(πt 2) |
|
1 |
|||||
30 |
10 |
|
20 |
40 |
10 |
ϕ1(t)= 2t 2 + cos(πt |
4) |
|
4 |
||||
Пример выполнения задания К1.
Определение скоростей и ускорений точек при поступательном и вращательном движениях твёрдого тела
По заданному уравнению движения звена 1 механизма (рис. 2.5, а) опре-
делить скорость, нормальное, касательное и полное ускорения точки М на мо-
мент времени t1, а также скорость и ускорение звена 4, если значения радиусов колес механизма и закон движения звена 1: R2 = 20 см, r2 = 5 см, R3 = 8 см,
r = 4 см, x = 2t2 |
− 5t см, t =1 с. |
|
3 |
1 |
1 |
Решение
Отметим на схеме положительные направления отсчета углов поворота дисков 2 и 3, соответствующие заданному положительному направлению дви-
35

жения звена 1. Направления показаны на рис 2.5, b дуговыми стрелками ϕ2 ,
ϕ3 , а положительное направление движения звена 4 – направлением оси x4 .
Рис. 2.5. Кинематика вращательного движения твердого тела:
а – схема механизма; b – расчетная схема для определения скоростей и ускорений точек механизма
Звено 1 движется поступательно. Движение задано координатным спосо-
бом в виде закона изменения координаты x . Дифференцируем по времени уравнение движения: x& = 4t − 5 см/с. В момент времени t1 = 1 с значение произ-
водной: x&(1) = –1 см/с. Отрицательное значение производной x& показывает,
что в данный момент времени звено 1 движется в отрицательном направлении
оси x. Скорость звена 1 равна модулю производной: V1 |
= x . На рис. 2.5, b на- |
||
|
|
& |
|
правление движения звена 1 в момент времени t1 = 1 с показано вектором ско-
рости V1, направленным в сторону, противоположную положительному направ-
лению оси x. Эту же скорость будет иметь точка А – точка контакта звена 1 с
диском 2, лежащая на расстоянии r2 от оси вращения диска. Следовательно,
V1 = VA = ω2r2 , |
где ω2 |
|
– угловая скорость диска 2. Отсюда угловая скорость |
|||||||||||
диска: ω2 |
= |
VA |
= |
|
4t − 5 |
|
= |
|
& |
|
рад/с. При t1 = 1 с значение производной отри- |
|||
|
|
|
|
|||||||||||
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
||||||||
|
|
r2 |
5 |
|
|
ϕ2 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
& |
|
|
(1) |
= – 0,2 рад/с. |
Это означает, что в заданный момент времени |
||||||||
цательно: ϕ2 |
||||||||||||||
вращение диска 2 с угловой скоростью ω2 |
(1)= ϕ2 (1) = 0,2 рад/с происходит в |
||
|
|
& |
|
36

отрицательном для диска 2 направлении. На рис. 2.5, b направление вращения диска 2 показано дуговой стрелкой ω2 в сторону, противоположную положи-
тельному направлению отсчета угла ϕ2 . При передаче вращения диска 2 диску
3 величины угловых скоростей дисков обратно пропорциональны радиусам
дисков, |
которым принадлежит точка контакта: ω2 = |
R3 |
. Тогда, угловая ско- |
|||||||||
R |
||||||||||||
|
|
|
|
|
|
|
|
ω |
3 |
|
||
|
|
|
|
|
|
|
|
|
2 |
|
||
|
|
R2 |
|
2t - 2,5 |
|
ϕ3 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|||||
рость диска 3 равна ω3 = ω2 |
|
= |
|
= |
рад/с. |
|
|
|||||
R |
|
|
||||||||||
|
|
|
|
|
|
|
& |
|
|
|
|
|
В |
3 |
|
|
|
|
|
производной ϕ3 отрицательно: |
|||||
момент времени t1 = 1с значение |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
& |
|
ϕ& 3(1) = – 0,5 рад/с и, следовательно, вращение диска 3 в данный момент време-
ни с угловой скоростью ω3 (1) = ϕ& 3(1) = 0,5 рад/с происходит в сторону, проти-
воположную положительному направлению отсчета угла ϕ3 , как показано на рис. 2.5, b. Величина (модуль) скорости точки М рассчитывается по формуле:
VM = ω3r3 . В момент времени t1 = 1 с величина скорости равна VM (1) = 2 см/с.
Вектор скорости VM расположен по касательной к траектории движения точки
М (окружности) и направлен в сторону вращения диска 3 (см. рис. 2.5, b).
Звено 4 движется поступательно. Скорость звена 4 равна скорости точки касания его с диском 3: V4 = VB = ω3R3 = 2t - 2,5 × 8 = x&4 . В момент времени t1 = 1 с значение производной от координаты движения звена 4 отрицательно:
x4 |
(1) |
= – 4 см/с. В результате, вектор скорости V4 (1), равный по модулю |
|||||||||
& |
|
|
|
|
|
|
|
|
|
|
|
V4 |
(1) |
= 4 см/с, направлен вдоль оси x4 в сторону, противоположную ее поло- |
|||||||||
жительному направлению (см. рис. 2.5, b). |
|
|
|
|
|
|
|
||||
|
|
Угловое ускорение диска 3: ε3(t) = |
|
ω3 |
|
= |
|
ϕ3 |
|
2 |
. Из того, что угло- |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
= 2 рад/с |
|||||
|
|
|
|
& |
|
|
|
&& |
|
|
|
вая скорость ω3 и угловое ускорение ω& 3 диска 3 имеют разные знаки, следует,
что вращение диска 3 замедленное. Угловое ускорение диска направлено в сто-
37

рону положительного направления отсчета угла поворота ϕ3 , диска 3 (см.
рис. 2.5, b).
Касательное ускорение aτ точки М рассчитывается по формуле aτ = ε3r3
и в момент времени t1 = 1 с: aτ = 8 см/с2. Так как вращение диска 3 замедлен-
ное, вектор касательного ускорения точки М aτ (t) направлен в сторону, про-
тивоположную вектору скорости VM (1) (см. рис. 2.5, b). Нормальное ускорение an точки М рассчитывается как an = ω23r3 . В момент времени t1 = 1 с величина нормального ускорения: an (1) = 1 см/с2. Вектор нормального ускорения an (1)
направлен по радиусу к центру диска 3 (см. рис. 2.5, b). Полное ускорение точ-
ки М в заданный момент времени равно: aM (1) = 
 aτ2 (1) + an2 (1) = 8,06 см/с2.
aτ2 (1) + an2 (1) = 8,06 см/с2.
Вектор полного ускорения aM направлен по диагонали прямоугольника, по-
строенного на векторах an и aτ .
Ускорение a4 звена 4 находится из условия, что звено 4 движется посту-
пательно и прямолинейно. При прямолинейном движении нормальная состав-
& |
& |
= |
|
ω3 |
|
R3 = ε3R3 . |
|
|
|||||
ляющая ускорения равна нулю. Тогда a4 = a4τ =V4 |
= = VB |
|
|
|||
|
|
|
|
& |
|
|
Так как угловое ускорение диска 3 является постоянной величиной, уско- |
||||||
рение a4 не зависит от времени и равно: a4 = 16 см/с2. |
Вектор ускорения a4 |
|||||
направлен вдоль оси x4 в сторону положительных значений.
2.5. Задание К2. Определение скоростей точек твёрдого тела при плоскопараллельном движении
Для заданного положения плоского механизма определить скорости точек и угловые скорости звеньев механизма.
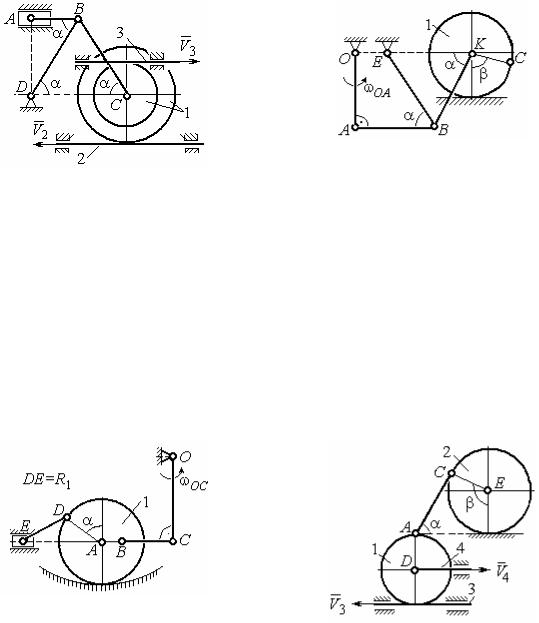
Варианты заданий показаны на рис. 2.6 – 2.8.
Исходные данные вариантов заданий выбираются из таблиц, приведён-
ных на рисунках схем механизмов.
38
|
Варианты № 1, 11, 21 |
|
|
Варианты № 2, 12, 22 |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Найти: VA ,VB ,VK , |
ω1, ωAB , ωOA , |
|
|||||||||||||
Найти: V |
A |
, V |
B |
, V , ω |
AB |
, ω |
BC |
, ω , ω |
BD |
|
|
|
|
ωBE , ωBK |
|
|
|
|
|
|
||||||||||
|
|
|
|
C |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Номер |
R1 |
|
|
r1 |
|
АD |
|
α |
V2 |
V3 |
Номер |
R1 |
|
|
OA |
OE |
|
|
α |
|
β |
|
VС |
|||||||
вари- |
|
|
|
|
вари- |
|
|
|
|
|
|
|||||||||||||||||||
анта |
см |
|
см |
|
см |
|
|
град |
см/с |
см/с |
анта |
см |
|
|
см |
см |
|
|
град |
град |
|
см/с |
||||||||
задания |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
задания |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
10 |
|
|
5 |
|
|
20 |
|
|
30 |
8 |
|
10 |
2 |
3 |
|
5 |
|
4 |
|
|
30 |
|
60 |
|
10 |
||||
11 |
12 |
|
|
8 |
|
|
25 |
|
|
45 |
10 |
|
4 |
12 |
4 |
|
8 |
|
6 |
|
|
45 |
|
90 |
|
8 |
||||
21 |
10 |
|
|
6 |
|
|
15 |
|
|
60 |
5 |
|
5 |
22 |
5 |
|
12 |
|
2 |
|
|
60 |
|
120 |
|
12 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
Варианты № 3, 13, 23 |
|
|
Варианты № 4, 14, 24 |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Найти: VA , VB , VC , VD ,VE , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
ωBC , ω1, ωDE |
|
|
|
|
|
|
Найти: V |
A |
, V , V |
E |
, |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω1, ω2, ωAC |
|
|
|
|
|
||||||
Номер |
R1 |
|
ОС |
|
AB |
|
|
BC |
α |
|
ωОС |
Номер |
R1 |
|
|
R2 |
|
α |
|
|
β |
|
V3 |
|
V4 |
|||||
вари- |
|
|
|
|
|
вари- |
|
|
|
|
|
|
|
|||||||||||||||||
анта |
см |
|
см |
|
см |
|
|
см |
град |
|
рад/с |
анта |
см |
|
|
см |
град |
|
|
град |
см/с |
|
см/с |
|||||||
задания |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
задания |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
12 |
|
18 |
|
10 |
|
|
35 |
60 |
|
4 |
4 |
10 |
|
15 |
|
30 |
|
|
60 |
|
8 |
|
4 |
||||||
13 |
10 |
|
15 |
|
10 |
|
|
25 |
90 |
|
8 |
14 |
6 |
|
10 |
|
45 |
|
|
90 |
|
4 |
|
6 |
||||||
23 |
15 |
|
20 |
|
5 |
|
|
20 |
120 |
|
6 |
24 |
10 |
|
12 |
|
60 |
|
|
120 |
|
3 |
|
3 |
||||||
Рис. 2.6. Задание К2. Определение скоростей точек тела при плоскопараллельном движении. Номера вариантов задания 1 – 4, 11 – 14, 21 – 24
39