

MetodTM2
.pdf4.ДИНАМИКА ТОЧКИ
4.1.Дифференциальные уравнения движения точки.
Движение точки под действием системы сил F1, F2 , …, FK в прямо-
угольной декартовой системе координат Оxyz описывается дифференциаль-
ными уравнениями: m |
d 2 x |
= å F , m |
d 2 y |
= åF , m |
d 2 z |
= å F , или, обо- |
|
|
|
||||
|
dt 2 |
kx |
dt 2 |
ky |
dt 2 |
kz |
|
|
|
|
значая вторые производные от координат по времени двумя точками, уравне-
ниями: m &x& = å Fkx , m &y& |
= åFky , |
m &z& = å Fkz , где m – масса точки; x, y, z – те- |
кущие координаты точки; |
&x&, &y& , &z& – проекции вектора ускорения точки на оси |
|
координат; å Fkx , åFky , |
å Fkz – |
алгебраические суммы проекций сил на оси |
координат.
Интегрирование дифференциальных уравнений производится в зависимо-
сти от их вида методами, известными из курса математики.
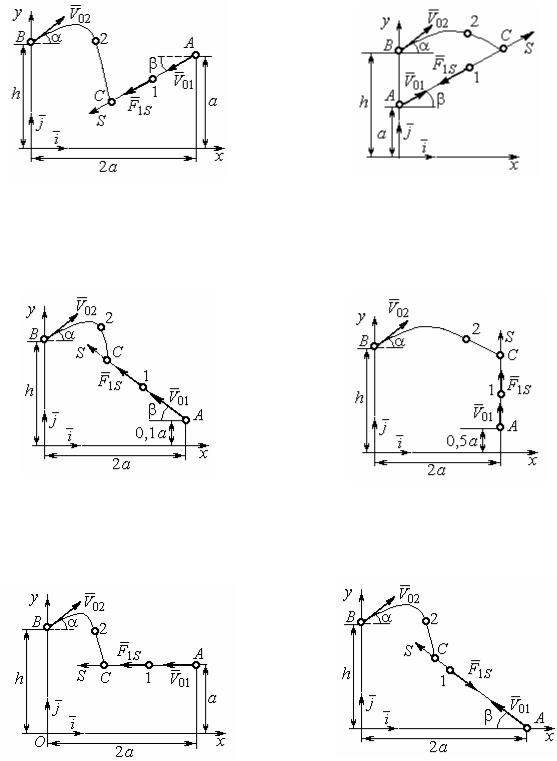
4.2. Задание Д1. Интегрирование дифференциальных уравнений движения точки
Две материальные точки движутся в вертикальной плоскости xOy. Точка
1 массой m1, получив в начальном положении А скорость V01, движется вдоль гладкой оси АS, наклоненной под углом β к горизонту. Во время движения на точку 1 действуют сила тяжести и постоянная сила F1, направленная вдоль оси
АS. Направление вектора проекции силы на ось F1S показано на схеме.
Одновременно с точкой 1 начинает движение точка 2 массой m2 из поло-
жения В на оси y. На точку 2 действуют сила тяжести и постоянная сила F2 .
Направление вектора силы F2 определяется его разложением по единичным векторам i , j координатных осей x, y.
73

Определить величину и направление (угол α ) начальной скорости V02
точки 2, чтобы в момент времени t1 точки 1 и 2 встретились на оси AS в точ-
ке С. Момент времени t1 задаётся в условиях задачи, или определяется по до-
полнительным условиям встречи.
Варианты заданий представлены на рис. 4.1 – 4.2. Исходные данные при-
ведены в табл. 4.1.
Варианты № 1, 11, 21 |
Варианты № 2, 12, 22 |
Встреча в точке С в момент, когда ско- |
Встреча в точке С в момент, когда точка |
рость точки 1 увеличилась в 1,5 раза |
1 максимально удалилась от места старта |
относительно начальной |
|
|
|
|
|
Варианты № 3, 13, 23 |
Варианты № 4, 14, 24 |
Встреча в точке С в момент, когда ско- |
|
|
|
рость точки 1 уменьшилась в 2 раза |
Встреча в точке С в момент времени |
||
относительно начальной |
|||
t1 |
= 0,5 c |
||
|
|||
Рис. 4.1. Задание Д1. Интегрирование уравнений движения точки. Номера вариантов задания 1 – 4, 11 – 14, 21 – 24
74
|
Окончание вариантов задания Д1 |
|
|
|
|
Варианты № 5, 15, 25 |
Варианты № 6, 16, 26 |
|
|
|
|
Встреча в точке С в момент, когда ско- |
Встреча в точке С, когда точка 1 макси- |
|
рость точки 1 увеличилась в 1,5 раза |
мально удалилась от места старта |
|
относительно начальной |
|
|
|
|
|
Варианты № 7, 17, 27 |
Варианты № 8, 18, 28 |
|
|
|
|
Встреча в точке С в момент времени |
Встреча в точке С в момент |
|
t1 = 0,4 c |
||
максимального подъёма точки 1 |
||
|
||
|
|
|
Варианты № 9, 19, 29 |
Варианты № 10, 20, 30 |
|
|
|
|
Встреча в точке С в момент времени |
Встреча в точке С в момент, когда точка |
|
1 достигла максимальной высоты подъё- |
||
t1 = 0,6 c |
||
ма |
||
|
Рис. 4.2. Задание Д1. Интегрирование уравнений движения точки. Номера вариантов задания 5 – 10, 15 – 20, 25 – 30
75
Таблица 4.1
Исходные данные задания Д1. Интегрирование уравнений движения точки
Номер |
m1, кг |
F1S , H |
V01, м/с |
β , град |
m2, кг |
F2 , H |
а, м |
h, м |
|
варианта |
|||||||||
задания |
|
|
|
|
|
|
|
|
|
1 |
1 |
3 |
3 |
30 |
2 |
7 i |
2 |
4 |
|
2 |
3 |
6 |
2 |
0 |
2 |
4 i +12 j |
1,5 |
1 |
|
3 |
2 |
5 |
4 |
35 |
1,5 |
10 i +4 j |
2 |
2,5 |
|
4 |
1 |
10 |
2 |
60 |
2 |
4 i |
+8 j |
2,2 |
2 |
5 |
1 |
3 |
3 |
30 |
2 |
5 i |
3 |
4,5 |
|
6 |
0,8 |
6 |
6 |
50 |
3 |
3 i +12 j |
1,5 |
4 |
|
7 |
2 |
5 |
4,5 |
40 |
1 |
10 i +2 j |
3 |
2,5 |
|
8 |
1 |
2 |
3,5 |
90 |
2 |
6 i |
+8 j |
1,2 |
2 |
9 |
2 |
4 |
4 |
0 |
1 |
3 i |
+2 j |
2 |
2,5 |
10 |
1 |
3 |
3 |
55 |
1,5 |
4 i |
1 |
1,5 |
|
11 |
0,5 |
2 |
3 |
60 |
2 |
3 i |
+8 j |
1,5 |
2,5 |
12 |
0,2 |
3 |
4 |
0 |
1 |
5 i |
–2 j |
1 |
2,5 |
13 |
1 |
2 |
6 |
50 |
1,5 |
6 i |
– 4 j |
0,8 |
2 |
14 |
0,5 |
6 |
4 |
35 |
1 |
3 i |
–2 j |
2,5 |
2 |
15 |
0,2 |
3 |
3 |
50 |
2 |
2 i |
–2 j |
3 |
4 |
16 |
2 |
4 |
6 |
40 |
2 |
3 i +12 j |
1 |
1,5 |
|
17 |
1 |
6 |
5 |
60 |
1,5 |
5 i |
+4 j |
3 |
2,5 |
18 |
1 |
2 |
2 |
90 |
2 |
4 i +4 j |
2 |
2 |
|
19 |
1 |
3 |
2 |
2 |
2 |
2 i +10 j |
1 |
1,5 |
|
20 |
5 |
4 |
2 |
30 |
1 |
3 i |
–2 j |
1,5 |
1,5 |
21 |
0,2 |
4 |
4 |
45 |
1 |
6 i |
–2 j |
1 |
3 |
22 |
0,4 |
3 |
2 |
0 |
2 |
4 i |
+6 j |
1,5 |
2,5 |
23 |
1 |
3 |
8 |
60 |
2 |
4 i |
+2 j |
1,2 |
1,5 |
24 |
0,5 |
8 |
3 |
30 |
2 |
6 i |
+7 j |
2 |
1,5 |
25 |
2 |
4 |
4 |
60 |
1 |
2 i |
–2 j |
3,5 |
4 |
26 |
1 |
3 |
5 |
50 |
2 |
4 i |
+6 j |
0,5 |
1,5 |
27 |
1,5 |
3 |
6 |
30 |
2 |
4 i |
+4 j |
2 |
2,5 |
28 |
2 |
5 |
3 |
90 |
2 |
6 i |
+7 j |
2 |
1,5 |
29 |
2 |
4 |
4 |
0 |
1 |
5 i |
–2 j |
1,5 |
2 |
30 |
1 |
3 |
2,5 |
70 |
2 |
4 i |
+6 j |
1 |
1 |
76

Пример выполнения задания Д1. Интегрирование дифференциальных уравнений движения точки
На рис. 4.3 представлена схема движения материальных точек в верти-
кальной плоскости xOy. Точка 1 массой m1 = 2 кг, получив в начальном поло-
жении А скорость V01 = 4 м/с, движется вдоль гладкой оси АS с углом наклона β
= 30o. Во время движения на точку 1 действуют
сила тяжести P1 и постоянная сила F1, проек- |
|
ция которой на ось АS равна F1S = 4,5 H. На- |
|
правление вектора проекции силы F1S на ось |
|
АS показано на рис. 4.3. |
|
Одновременно с началом движения точ- |
Рис. 4.3. Схема совместного |
ки 1 из положения В на оси y высотой h = 1 м |
движения точек |
|
начинает движение точка 2 массой m2 = 1,2 кг. На точку 2 действуют сила тя-
жести P2 |
и сила F2 |
, направление которой определяется разложением по еди- |
|
ничным |
векторам |
i , |
j осей x, y декартовой системы координат: |
F2 = 2,4i + 4,5 j , Н. |
Определить величину и направление (угол α ) начальной |
||
скорости |
V02 точки 2, |
чтобы в момент времени t1, когда скорость точки 1 |
|
уменьшилась в 2 раза по сравнению с начальным значением, обе они встрети-
лись на оси AS в точке С. |
|
|
|
|
||||
|
|
|
|
Решение |
|
|
|
|
|
Рассмотрим движение точки 1. В текущий момент времени на точку 1 |
|||||||
действует сила тяжести P1, нормальная реакция N1 наклонной оси АS |
и сила |
|||||||
F1, величина проекции которой на ось АS равна |
F1S (рис. 4.4). Дифференци- |
|||||||
альное |
уравнение |
движения |
точки |
1 |
&& |
или |
||
m1S = F1S − P1sinβ, |
||||||||
m |
dV1S |
= 4,5 − m gsinβ . С учетом исходных данных, полагая ускорение свобод- |
||||||
dt |
||||||||
1 |
1 |
|
|
|
|
|
||
ного падения g = 9,81 м/с2, дифференциальное уравнение движения точки 1 77

приводится к виду: |
dV1S |
= −2,66. Разделим переменные, представив диффе- |
||||||||||
|
||||||||||||
|
dt |
|
|
|
|
|
|
|
|
|
|
|
ренциальное уравнение в виде |
dV1S = −2,66dt . Проинтегрировав его, получим |
|||||||||||
|
|
|
зависимость скорости точки 1 от времени: |
|||||||||
|
|
|
V1S = −2,66t + C1 . Для того чтобы опреде- |
|||||||||
|
|
|
лить закон движения точки 1, представим |
|||||||||
|
|
|
скорость точки как производную от коорди- |
|||||||||
|
|
|
наты V |
= |
dS |
|
. Получим дифференциальное |
|||||
|
|
|
|
|
||||||||
|
|
|
1S |
|
dt |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
Рис. 4.4. Силы, действующие на |
|
|
dS |
|
= −2,66t + C1 , проинтегриро- |
|||||||
точки 1 и 2, во время их |
уравнение |
|
|
|||||||||
|
dt |
|
||||||||||
движения |
|
|
|
|
|
|
|
|
|
|
||
вав которое, найдём уравнение движения точки 1: S = -1,33t2 + C t + C |
2 |
. Кон- |
||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
||
станты интегрирования С1, С2 |
находятся из начальных условий: при |
t = 0, S = |
||||||||||
0, S& =V1S =V01= 4 м/с. Подставляя первое из условий в уравнение движения точки 1, получим С2 = 0. Для того, чтобы найти константу С1, подставим на-
чальное значение скорости в уравнение S& = -2,66t + C1 , выражающее зависи-
мость скорости точки 1 от времени. Получим С1 = 4. Таким образом, движение точки 1 вдоль оси AS описывается уравнением: S = -1,33t2 + 4t .
По условию задачи встреча двух точек происходит в момент времени t1,
когда скорость первой точки уменьшилась в 2 раза по сравнению с начальной:
V1S (t1) = V201 = 2 м/с. Подставляя это условие в уравнение, выражающее зависи-
мость скорости точки 1 от времени, получим: 2 = −2,66t1 + 4, откуда найдём момент времени встречи t1 = 0,75 с. Расстояние АС, пройденное точкой 1 до встречи, определяется как путь, пройденный этой точкой за время t1= 0,75 с,
АС = S(t ) = -1,33× 0,752 |
+ 4 × 0,75= 2,25 м. Координаты точки встречи x |
C |
, y |
C |
|
1 |
|
|
|
||
определяются из равенств: xC = S(t1)cos30o = 1,95 м, |
yC = S(t1)sin30o = 1,12 м. |
|
|||
78

Рассмотрим движение точки 2. В текущий момент времени на нее дейст-
вует сила тяжести P2 и сила F2 = 2,4i + 4,5 j , проекции которой на оси коорди-
нат F2x = 2,4 Н, F2y = 4,5 Н. Дифференциальные уравнения движения точки 2 в
проекциях на оси координат x, y имеют вид:
m2&x& = F2x = 2,4, m2 &y& = −P2 + F2 y = − m2 g + 4,5 ,
или после подстановки исходных данных: &x&= 2, &y& = −6,06.
Представим в первом уравнении проекцию ускорения точки 2 на ось х как производную от соответствующей проекции скорости &x& = dVdt2x . После разделе-
ния переменных получим дифференциальное уравнение dV2x = 2dt . Проинтег-
рируем его и найдем зависимость горизонтальной составляющей скорости точ-
ки 2 от времени: V2x = 2t + C3 . Заменим в этом уравнении проекцию скорости
точки на ось x на производную от координаты V |
= |
dx |
. После |
интегрирования |
|||
|
|||||||
|
|
|
2x |
|
dt |
|
|
|
|
|
|
|
|
||
получим |
уравнение, описывающее движение |
точки 2 |
вдоль оси x, |
||||
x = t2 + C t + C |
4 |
. Для того чтобы найти постоянные С3 и С4, воспользуемся гра- |
|||||
3 |
|
|
|
|
|
|
|
ничными условиями движения точки 2 – известной начальной координатой движения точки и вычисленной координатой точки встречи, то есть при t = 0, x
= 0, а при t1 = 0,75 с x(t1) = xC = 1,95 м. Подставляя граничные условия в уравне-
ние движения точки 2, получим С4 = 0, С3 = 1,85. Таким образом, уравнение движения точки 2 вдоль оси x: x = t2 + 1,85t .
Закон движения точки 2 вдоль оси y находим путем интегрирования вто-
рого дифференциального уравнения. Его представим в виде: dVdt2 y = −6,06 . По-
сле разделения переменных и первого интегрирования получим зависимость проекции скорости точки 2 на ось y от времени: V2 y = −6,06t + C5 . Заменив про-
екцию скорости точки 2 на ось y производной от координаты V2 y = dydt ,
79

вторично проинтегрируем. В результате движение точки 2 вдоль оси y описыва-
ется уравнением: y = −3,03t2 + C5t + C6 . Для определения констант C5 и C6 ис-
пользуем граничные условия: при t = 0, y(0) = h = 1 м, а при t1 = 0,75 с y(t1) = yC = 1,12 м. Получаем C6 = 1. С5 = 2,43. Таким образом, точка 2 движется вдоль оси y по закону: y = −3,03t2 + 2,43t +1.
Проекции скорости точки 2 на оси координат как функции времени име-
ют вид: V2x (t) = x = 2t + 1,85, |
V2 y (t) = y = −6,06t + 2,43. Значения проекций при |
||||||||
|
& |
|
|
|
|
|
& |
||
t = 0: V02x = V2x (0) = 1,85 |
м/с, V02y = V2y (0) = 2,43 м/с. Величина начальной |
||||||||
|
|
|
|
|
|
|
|
|
|
скорости: V |
= V |
2 + V |
2 |
= 3,05 м/с. |
|||||
02 |
|
|
02x |
|
|
02 y |
|
||
Угол наклона вектора скорости в начальный момент определяется из ра- |
|||||||||
венства: tgα = |
V02 y |
= |
|
2,43 |
= 1,31. Откуда α = 52,64o . |
||||
|
1,85 |
||||||||
|
|
V |
|
|
|
||||
|
|
02x |
|
|
|
|
|
||
4.3. Колебания материальной точки
Силы, возникающие при отклонении материальной точки от положения равновесия и направленные так, чтобы вернуть точку в это положение, называ-
ются восстанавливающими. Восстанавливающие силы, линейно зависящие от расстояния от точки до положения её равновесия, называются линейными вос-
станавливающими силами. Так, сила упругости пружины F = c l , где с – ко-
эффициент жесткости (или просто жёсткость) пружины; l – удлинение пру-
жины, является линейной восстанавливающей силой.
Дифференциальное уравнение движения материальной точки массой m
вдоль оси Оx под действием линейной восстанавливающей силы, представляет собой уравнение гармонических колебаний и имеет вид:
m&x&+ cx = 0 , или &x&+ ω2 x = 0,
где x – отклонение точки от положения равновесия, куда поместили начало
80

координат; |
ω – угловая частота колебаний, ω2 = |
c |
. Единица измерения угло- |
|||||
|
||||||||
|
|
|
|
|
m |
|||
вой частоты – рад/с. |
||||||||
|
Решение |
дифференциального уравнения свободных колебаний представ- |
||||||
ляется суммой |
x = C1cosωt + C2sinωt , где постоянные интегрирования С1 и С2 |
|||||||
находятся |
из |
начальных условий. Амплитуда свободных колебаний |
||||||
A = |
|
. Промежуток времени, в течение которого точка совершает одно |
||||||
C 2 + C 2 |
||||||||
1 |
2 |
|
|
|
|
|
|
|
полное колебание, называется периодом колебаний: T = |
2π |
. Величина, обрат- |
||||||
|
||||||||
|
|
|
|
|
|
|
ω |
|
ная периоду, ν = T1 определяет число полных колебаний точки за 1 с и называ-
ется частотой колебаний. Частота колебаний измеряется в герцах (Гц). Часто-
та, равная 1 Гц, соответствует одному полному колебанию в секунду. Угловая частота связана с частотой колебаний соотношением ω = 2πν .
Если на материальную точку кроме восстанавливающей силы действует
сила сопротивления движению, пропорциональная скорости точки, R = −μV ,
где μ – коэффициент сопротивления, то дифференциальное уравнение движе-
ния точки с сопротивлением относительно положения равновесия имеет вид
m&x&+ μx& + cx = 0, или &x&+ 2nx& + ω2 x = 0 , где n – коэффициент затухания, n = |
μ |
; |
|
2m |
|||
|
|
ω – угловая частота собственных колебаний точки без учёта сопротивле- |
||||||||||
ния, ω2 = |
c |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
m |
|
|
|
|
|
|
|
|
|
При |
n < |
ω движение точки представляет затухающие колебания. Общее |
||||||||
решение |
дифференциального |
уравнения колебаний с |
сопротивлением |
|||||||
x = e−nt (C cosω t + C |
2 |
sinω t) |
= |
Ae−ntsin(ω t + α) , где С1 и С2 – постоянные ин- |
||||||
|
1 |
|
1 |
1 |
|
1 |
|
|
|
|
|
|
|
|
|
ω = |
|
; |
|||
тегрирования; |
ω – |
|
угловая |
частота затухающих колебаний, |
ω2 − n2 |
|||||
|
|
|
1 |
|
|
|
|
1 |
|
|
81
A1 = Ae−nt – амплитуда затухающих колебаний, A = 
 C12 + C22 ; α – начальная
C12 + C22 ; α – начальная
фаза колебаний, tgα = C1 .
C2
При n > ω движение точки апериодическое, затухающее. Общее решение дифференциального уравнения движения точки с таким сопротивлением имеет
вид x = e−nt (C eω2t + C |
2 |
e−ω2t ) , где |
ω |
2 |
= |
n2 − ω2 |
. |
||
1 |
|
|
|
|
|
|
|
||
При |
n = ω движение |
точки |
происходит согласно уравнению |
||||||
x = e−nt (C t + C |
2 |
) . |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
Если кроме восстанавливающей силы на материальную точку действует
переменная возмущающая сила, колебания точки называются вынужденными.
При действии гармонической возмущающей силы F = Hsinpt , где Н, р –
амплитуда и угловая частота колебаний возмущающей силы, дифференциаль-
ное уравнение вынужденных колебаний материальной точки относительно по-
ложения равновесия |
и |
при |
отсутствии |
сил сопротивления имеет вид |
||||
&& |
&& |
|
2 |
x |
= hsinpt , где |
ω – угловая частота собственных |
||
mx + cx = Hsinpt , или |
x + ω |
|
||||||
гармонических колебаний, |
|
ω2 = |
c |
; h – относительная амплитуда возмущаю- |
||||
|
|
|||||||
|
|
|
|
|
|
m |
|
|
щей силы, h = Hm .
Общее решение неоднородного дифференциального уравнения вынуж-
денных колебаний представляется как сумма общего решения однородного уравнения и частного решения неоднородного. При отсутствии резонанса, когда частота собственных колебаний не совпадает с частотой возмущающей силы,
h
решение имеет вид: x = C1cosωt + C2sinωt + ω2 − p2 sinpt , а в случае резонанса,
когда р = ω , – вид: x = C1cosωt + C2sinωt − 2htp cospt . Значения произвольных постоянных С1 и С2 определяются из общего решения неоднородного уравне82