

MetodTM2
.pdf
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
& |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Скорость центра катка 3 V |
= ω |
3 |
r = |
x1 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Подставляя исходные данные задачи с учётом найденных кинематических |
||||||||||||||||||||||||||||||||||||||||||||||||||
соотношений, получим кинетическую энергию тел системы |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
1 |
|
|
P æ x& |
ö2 |
|
|
P |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2P |
|
|
2 |
æ x& |
ö2 |
8P |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
T = |
|
m V 2 = |
|
|
|
|
ç |
1 |
÷ |
= |
|
|
|
x&2 , T = |
|
|
|
J |
2z |
w2 |
= |
|
× |
|
|
|
(r 2) |
ç |
|
1 |
÷ = |
|
x&2 , |
|||||||||||||||||
|
|
|
|
|
|
|
8g |
|
2 |
|
2 |
|
g |
|
|
|
||||||||||||||||||||||||||||||||||
1 |
2 1 1 |
2g è 2 ø |
|
|
1 |
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
è R ø |
9g 1 |
|||||||||||||||||||||||
|
|
|
|
1 |
m V 2 + |
1 |
|
|
|
w2 |
|
|
1 P x&2 |
|
|
|
1 Pr 2 æ x& |
ö2 |
|
|
3P |
x&2 . |
|
|
||||||||||||||||||||||||||
|
|
T = |
|
|
|
|
J |
zC |
= |
|
|
|
|
|
|
|
|
|
1 |
+ |
|
|
|
|
|
|
ç |
1 |
|
÷ = |
|
|
|
|
|
|
||||||||||||||
|
|
3 |
|
2 |
|
3 C |
|
2 |
|
3 |
|
|
2 g 4 |
|
|
|
2 2g è 2r ø |
16g |
|
1 |
|
|
||||||||||||||||||||||||||||
Складывая полученные выражения, найдем полную кинетическую энер- |
||||||||||||||||||||||||||||||||||||||||||||||||||
гию системы: T = T + T |
+ T |
= |
173P |
x&2 |
= |
|
|
1,2P |
x&2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
1 |
|
2 |
|
|
|
3 |
|
144g |
1 |
|
|
|
|
|
|
|
g |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Величина силы упругости пружины пропорциональна её растяжению. Для
механической системы, показанной на рис 6.12, найдём связь растяжения пру-
жины с движением бруса 1. Допустим, брус 1 переместился из начального по-
ложения |
на произвольное расстояние |
x1, |
Блок |
2 повернулся на угол ϕ2 , |
|||||||||||||
j2 |
= |
x1 |
. Растяжение пружины (обозначим её ℓ) |
при повороте блока 2 равно |
|||||||||||||
|
|||||||||||||||||
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
длине дуги окружности радиуса r : l = j2r = |
x1r |
. Величина силы упругости |
|||||||||||||||
R |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
пружины |
при |
|
движении |
бруса |
1 |
|
вычисляется |
по |
формуле: |
||||||||
F |
|
= cl = c |
x1r |
|
= P |
x1 |
. Направление силы упругости при движении бруса 1 в |
||||||||||
|
|
|
|||||||||||||||
упр |
|
|
|
R |
|
R |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
положительном направлении отсчета координаты |
x1 показано на рис. 6.12. |
||||||||||||||||
|
|
Дадим системе возможное перемещение, при котором брус 1, передвига- |
|||||||||||||||
ясь на расстояние δx1> 0 вдоль оси x, |
вызывает перемещение δsC центра кат- |
||||||||||||||||
ка 3 и поворот на угол δϕ2 блока 2. При этом пружина растягивается на рас-
стояние δl . Работу совершают силы тяжести бруса 1 и катка 3, пара сил с мо-
ментом М, сила F и сила упругости пружины (см. рис. 6.12).
143

Для вычисления обобщённой силы, соответствующей обобщённой коор-
динате x1 найдём сумму элементарных работ сил на данном перемещении сис-
темы |
dA = -P dx cos60o + Mdj |
2 |
- P ds |
C |
cos60o + Fds |
C |
cos30o - F dl, где |
δs |
C |
, |
|||||||||
|
|
|
1 |
1 |
|
|
|
|
|
3 |
|
|
упр |
|
|
||||
δϕ2 , |
δl – элементарные перемещения центра масс катка 3, блока 2 и элемен- |
||||||||||||||||||
тарное удлинение пружины, |
вызванные движением бруса 1 на расстояние δx1 . |
||||||||||||||||||
При этом: dj |
|
= |
1 |
dx , ds |
C |
= |
1 |
dx , dl = |
r |
dx . |
|
|
|
|
|
||||
|
R |
2 |
R |
|
|
|
|
|
|||||||||||
|
|
2 |
|
1 |
|
|
|
1 |
|
1 |
|
|
|
|
|
||||
При заданных значениях сил и момента и с учётом найденных кинемати-
ческих соотношений выражение суммы элементарных работ сил имеет вид: |
|
|||||||||||||||||||
|
1 |
|
Pr |
|
1 |
|
|
|
|
|
Px |
|
r |
|
æ |
|
0,44 |
|
ö |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
||||||||
dA = - |
|
P dx + |
|
dx - P |
|
dx |
+ Pdx |
|
|
- |
1 |
× |
|
dx |
= Pç0,79 |
- |
|
x |
÷dx |
|
2 |
R |
4 |
|
|
R |
R |
r |
|||||||||||||
|
1 |
1 |
1 |
1 2 |
|
|
1 |
è |
|
1 |
ø |
1 |
||||||||
Сумма элементарных работ сил при вариации обобщенной координаты
δx1 может быть представлена в виде: δA = Qxδx1, где Qx – обобщенная сила,
соответствующая обобщённой координате x1. Сравнивая два последних равен-
|
|
|
|
|
|
æ |
0,44 |
|
|
ö |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ства, найдём обобщенную силу: Q |
x |
= Pç0,79 - |
|
|
x |
÷ . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
è |
|
|
1 |
ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Составим уравнения Лагранжа. Вычислим частные производные от кине- |
|||||||||||||||||||||||||
тической энергии по обобщенной скорости x& |
и координате x : |
|
∂T |
= 2,4 × |
P |
x& |
, |
||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
¶x& |
|
|
g 1 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
∂T |
|
|
|
|
|
|
|
|
|
|
d |
æ |
¶T |
ö |
|
|
|
P |
|
|
|
|
|
|||
|
= 0 . Определим полную производную по времени: |
|
ç |
÷ |
= 2,4 × |
&x& . |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
¶x& |
g |
|
|
|
|
|||||||||||||||||
|
¶x |
|
|
|
|
|
|
|
|
|
dt ç |
÷ |
|
|
|
1 |
|
|
|
|
|||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
è |
1 |
ø |
|
|
|
|
|
|
|
|
|
|||
|
|
Результаты расчетов подставим в уравнения Лагранжа II |
|
рода |
и получим |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
æ |
|
|
0,44 |
|
|
ö |
||||
дифференциальное уравнение колебаний бруса 1: |
2,4 × |
|
|
|
|
&x& = Pç0,79 |
- |
|
|
x |
÷ , |
||||||||||||||||
|
g |
r |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
è |
|
|
|
1 |
ø |
||||||
2 |
, |
&& |
+ 9x1 = 3,23. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
или, при r = 0.2 м, g = 9,81 м/с |
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Решение линейного неоднородного дифференциального уравнения с по-
стоянными коэффициентами представляется в виде суммы общего решения од-
нородного уравнения и частного решения неоднородного: x1 = xодн + xчастн . 144

Общее решение однородного уравнения xодн = C1sinkt + C2coskt , где С1,
С2 – произвольные постоянные; k – круговая частота собственных колебаний бруса 1, k = 
 9 = 3 рад/с. Частное решение неоднородного уравнения ищется по виду правой части уравнения в виде константы ϕчастн = b . Подставив его в уравнение колебаний, получим: 9b = 3,23, откуда b = 0,36. Таким образом, об-
9 = 3 рад/с. Частное решение неоднородного уравнения ищется по виду правой части уравнения в виде константы ϕчастн = b . Подставив его в уравнение колебаний, получим: 9b = 3,23, откуда b = 0,36. Таким образом, об-
щее решение неоднородного уравнения x1(t) = C1sin3t + C2cos3t + 0,36.
Произвольные постоянные С1, С2 находятся из начальных условий. По предположению начальное положение бруса 1 x1(0) = 0 . Скорость бруса в на-
чальный момент времени определяется начальной угловой скоростью блока 2: x&1(0) = ω2 (0)R = ω20R = 0,5(1,5·0,2) = 0,15 м/с. Подставляя значение начальной координаты в общее решение неоднородного уравнения при t = 0, получим
C2 = −0,36 . Вычисляем скорость бруса 1: x&1(t) = 3C1cos3t − 3C2sin3t и, подстав-
ляя начальное значение, получим x1(0) |
= 0,15 = 3C1. Отсюда C1 = 0,05. Оконча- |
||
|
|
& |
|
тельно, уравнение движения бруса 1: |
x1(t) = 0,05sin3t − 0,36cos3t + 0,36 м. Ам- |
||
плитуда колебаний бруса A = |
|
|
|
C 2 |
+ C 2 |
= 0,363 м. |
|
1 |
2 |
|
|
Уравнение колебательного движения блока 2 найдём из ранее полученно-
го соотношения: ϕ2 = xR1 = 3,33x1. Тогда, уравнение колебаний блока 2
ϕ2 (t) = 0,17sin3t − 1,2cos3t + 1,2 рад.
6.5. Задание Д8. Исследование механической системы с двумя степенями свободы
Механическая система состоящая, из четырёх тел, из состояния покоя движется в вертикальной плоскости под действием сил тяжести P1, P2 , P3 , P4 ,
силы F и пары сил с моментом М. Качение тел во всех случаях происходит без проскальзывания, скольжение грузов по поверхностям – без трения. Радиусы дисков одинаковы и равны R. Найти уравнения движения системы в обобщён145
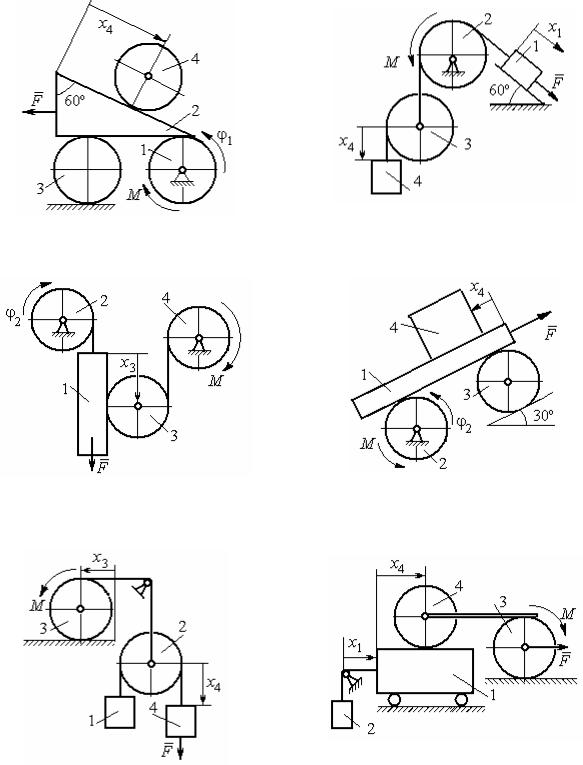
ных координатах. Варианты заданий и рекомендуемые обобщённые координа-
ты даны на рис. 6.13 – 6.14. Варианты исходных данных – в табл. 6.3.
Варианты № 1, 11, 21 |
Варианты № 2, 12, 22 |
|
|
|
|
Варианты № 3, 13, 23 |
Варианты № 4, 14, 24 |
|
|
|
|
Варианты № 5, 15, 25 |
Варианты № 6, 16, 26 |
|
|
Рис. 6.13. Задание Д8. Исследование движения механической системы с двумя степенями свободы. Номера вариантов задания 1 – 6, 11 – 16, 21 – 26
146
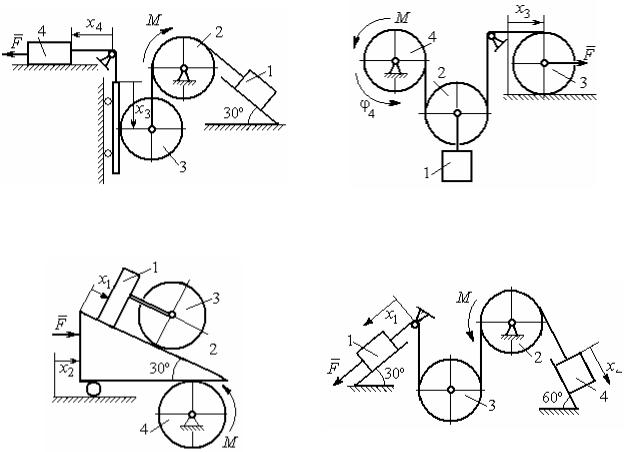
|
Окончание вариантов задания Д8 |
Варианты № 7, 17, 27 |
Варианты № 8, 18, 28 |
|
|
Варианты № 9, 19, 29 |
Варианты № 10, 20, 30 |
|
|
Рис. 6.14. Задание Д8. Исследование движения механической системы с двумя степенями свободы. Номера вариантов задания 7 – 10, 17 – 20, 27 – 30
Таблица 6.3
Исходные данные задания Д8. Исследование движения механической системы с двумя степенями свободы
Номер |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
варианта |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
задания |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р1, Н |
Р |
2Р |
Р |
1,5Р |
Р |
3Р |
Р |
1,2Р |
3Р |
Р |
2Р |
Р |
Р |
2Р |
Р |
Р2, Н |
3Р |
3Р |
4Р |
3Р |
2Р |
Р |
2Р |
3Р |
Р |
2Р |
3Р |
2Р |
3Р |
4Р |
3Р |
Р3, Н |
2Р |
2Р |
3Р |
2Р |
2Р |
2Р |
3Р |
Р |
2Р |
3Р |
2Р |
2Р |
2Р |
Р |
2Р |
Р4, Н |
2Р |
Р |
Р |
2Р |
3Р |
3Р |
Р |
Р |
2Р |
Р |
Р |
Р |
2Р |
2Р |
2Р |
R, м |
2r |
1,5r |
2,5r |
1,2r |
2r |
r |
1,5r |
r |
2r |
r |
1,5r |
1,2r |
2r |
2r |
2r |
F, Н |
Р |
2Р |
Р |
3Р |
Р |
Р |
2Р |
4Р |
Р |
2Р |
Р |
2Р |
1,5Р |
4Р |
2Р |
М, Н·м |
2Рr |
3Рr |
4Рr |
3Рr |
3Рr |
4Рr |
2Рr |
2Рr |
3Рr |
2Рr |
3Рr |
4Рr |
3Рr |
3Рr |
2Рr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
147
Окончание таблицы 6.3
Номер |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
варианта |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
30 |
задания |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р1, Н |
4Р |
1,5Р |
Р |
2Р |
Р |
Р |
1,5Р |
1,5Р |
2Р |
Р |
Р |
2Р |
1,2Р |
3Р |
1,2Р |
Р2, Н |
2Р |
2Р |
2Р |
4Р |
3Р |
4Р |
3Р |
4Р |
3Р |
2Р |
2Р |
1,2Р |
2Р |
3Р |
2Р |
Р3, Н |
2Р |
2Р |
3Р |
2Р |
2Р |
3Р |
2Р |
2Р |
Р |
2Р |
3Р |
2Р |
Р |
Р |
3Р |
Р4, Н |
1,5Р |
2Р |
3Р |
Р |
2Р |
2Р |
2Р |
Р |
2Р |
3Р |
Р |
Р |
2Р |
Р |
2Р |
R, м |
1,5r |
r |
1,5r |
2r |
r |
1,2r |
2r |
1,5r |
2r |
r |
1,5r |
2r |
r |
1,2r |
2r |
F, Н |
2Р |
2Р |
Р |
3Р |
4Р |
2Р |
3Р |
2Р |
3Р |
Р |
3Р |
1,5Р |
4Р |
2Р |
3Р |
М, Н·м |
3Рr |
2Рr |
4Рr |
Рr |
4Рr |
4Рr |
2Рr |
Рr |
4Рr |
2Рr |
4Рr |
2Рr |
2Рr |
3Рr |
2Рr |
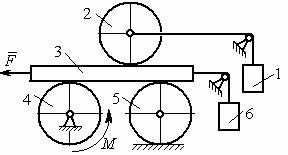
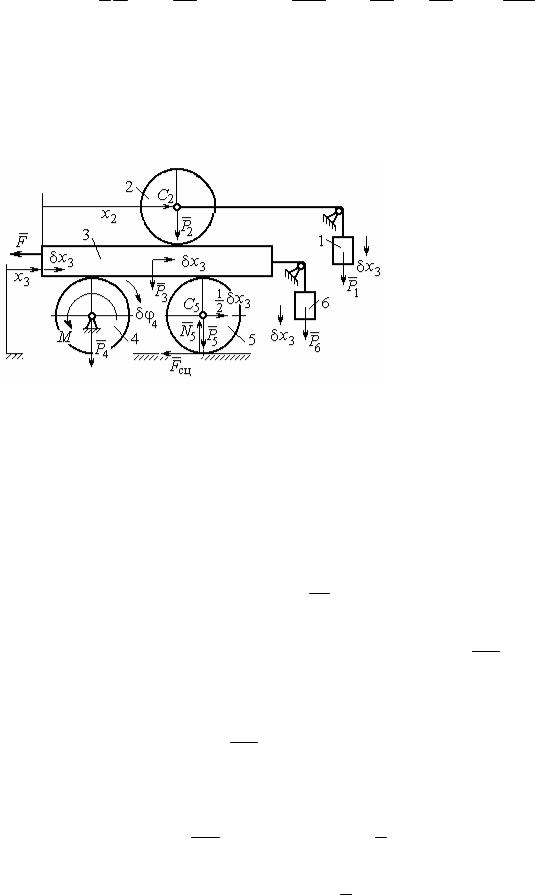
Пример выполнения задания Д8. Исследование движения механической системы с двумя степенями свободы
Платформа 3 лежит горизонтально на катке 5 и блоке 4 одинакового ра-
диуса R (рис. 6.15). На платформу действует горизонтальная сила F . К блоку 4,
вращающемуся вокруг неподвижной оси, приложена пара сил с моментом
М. Каток 5 катится по горизонтальной поверхности. К краю платформы од-
ним концом прикреплена горизонталь-
ная нить, а к другому концу, перебро-
Рис. 6.15. Механическая система с двумя степенями свободы шенному через невесомый блок, при-
креплён груз 6, движущийся вертикально. На платформе 3 установлен каток 2
радиуса R. К центру катка прикреплена нить, расположенная параллельно плат-
форме и натянутая грузом 1, движущимся вертикально (см. рис. 6.15). Движе-
ние системы началось из состояния покоя. Качение тел без проскальзывания.
Определить уравнения движения системы в обобщённых координатах, если
R = 2r, веса тел Р1 = Р6 = Р, Р3 = 3Р, Р4 = Р5 = Р2 = 2Р, F = Р, М = 3Рr.
Решение
Рассматриваемая механическая система, включающая катки 2, 5, плат-
форму 3, блок 4 и грузы 1, 6 имеет две степени свободы, так как перемещение
148
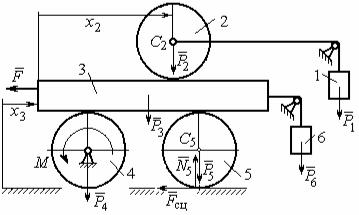
катка 2 относительно платформы 3 не зависит от перемещения самой платфор-
мы. За обобщенные координаты выберем перемещение x2 центра масс катка 2
относительно края платформы и перемещение x3 платформы 3 относительно произвольной неподвижной вертикальной плоскости (рис. 6.16). Обобщенные скорости – скорость x&2 центра масс катка 2 относительно края платформы и скорость платформы x&3 относительно неподвижной вертикали. Уравнения Ла-
гранжа II рода, описывающие движение системы,
d æ |
¶T |
ö |
|
¶T |
|
d |
æ |
¶T |
ö |
|
¶T |
|
|
|
ç |
|
÷ |
- |
|
= Qx2 , |
|
ç |
|
÷ |
- |
|
= Qx3 , |
|
|
|
|
|
|
||||||||
ç |
¶x&2 |
÷ |
¶x2 |
|
ç |
¶x&3 |
÷ |
¶x3 |
|||||
dt è |
ø |
|
|
dt è |
ø |
|
|
||||||
где Т – кинетическая энергия системы; Qx2 , Qx3 – обобщенные силы, соответ-
ствующие указанным обоб- |
|
|
|
|
||
щенным координатам. |
|
|
|
|
||
Вычислим |
кинетиче- |
|
|
|
|
|
скую энергию |
системы как |
|
|
|
|
|
сумму кинетических энергий |
|
|
|
|
||
призмы и катков. |
|
|
|
|
||
Платформа 3 совершает |
Рис. 6.16. Действующие силы |
|||||
поступательное |
движение. |
|||||
и обобщённые координаты механической системы |
||||||
Кинетическая энергия платформы равна T = |
P3 |
V 2 , |
где V – скорость плат- |
|||
2g |
||||||
|
|
3 |
3 |
3 |
||
формы, причём, в соответствии с выбором обобщённых координат и скоростей, |
||||||||||||||
V3 = x3 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
& |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Блок 4 |
вращается вокруг неподвижной оси. Энергия вращательного дви- |
|||||||||||||
жения блока |
T |
= |
1 |
J |
|
w2 , где J |
|
, ω |
|
– осевой момент инерции блока 4 и его |
||||
|
|
|
|
|||||||||||
|
4 |
2 |
|
4 |
4 |
4 |
|
4 |
|
|
|
|
|
|
угловая скорость. Угловая скорость блока 4 w4 = |
V3 |
= |
x&3 |
. |
||||||||||
R4 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2r |
||
149
Каток 5 совершает плоскопараллельное движение, его кинетическая энер-
гия вычисляется по формуле: T = |
1 |
|
P5 |
V 2 |
+ |
1 |
J |
5 |
ω2 |
, где |
J |
5 |
– момент инерции |
|
|
|
|||||||||||
5 |
2 |
|
g |
C5 |
|
2 |
|
5 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
катка относительно оси вращения, проходящей через его центр масс, ω5 , VC5 –
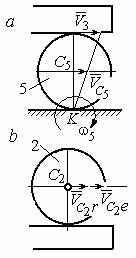
угловая скорость и скорость центра масс катка 5. Для определения скорости центра масс катка 5 заметим, что точка касания катка с платформой имеет ско-
рость, равную скорости платформы, а точка К касания катка с неподвижной го-
ризонтальной поверхностью является его мгно-
|
венным центром скоростей. Следовательно, ско- |
||||||||||||
|
рость центра катка |
равна |
половине скорости |
||||||||||
|
платформы: VC5 |
= |
1 |
V3 = |
1 |
|
& |
, а угловая скорость |
|||||
|
|
|
|
|
|||||||||
|
2 |
2 |
|
x3 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
катка 5 ω = |
V3 |
= |
x&3 |
|
(рис. 6.17, а). |
|||||||
|
|
|
|||||||||||
|
|
5 |
2R5 |
|
|
4r |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||||
|
|
При расчёте кинетической энергии катка 2 |
|||||||||||
Рис. 6.17. Скорости центров |
необходимо учитывать, что каток совершает |
||||||||||||
сложное движение |
– |
качение по поверхности |
|||||||||||
катков 2 и 5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
платформы и перемещение вместе с платформой. |
|
|
|
|
|
|
|
|
|
||||
Абсолютная скорость VC2 |
центра масс катка 2 представляется в виде век- |
||||||||||||
торной суммы VC2 = VC2 r + VC2e |
(рис. 6.17, b), |
где VC2e |
– вектор переносной |
||||||||||
скорости катка, равный по модулю скорости платформы, VC2e =V3 = x&3 ; VC2 r –
вектор относительной скорости центра масс катка, равный по величине скоро-
сти центра масс катка 2 относительно края платформы, VC2r = x&2 . Модуль абсо-
лютной скорости центра масс катка 2 равен сумме VC2 =VC2 r + VC2e = x&2 + x&3
(рис. 6.17, b).
Угловая скорость переносного движения катка 2 равна нулю, поскольку переносное движение катка – это поступательное движение платформы. В ре-
150

зультате, угловая скорость катка 2 |
равна его угловой скорости в относительном |
|||||||||||||||||||||||||
движении: |
w2 |
= |
VC2r |
|
= |
x&2 |
|
. |
Кинетическая энергия катка 2 рассчитывается по |
|||||||||||||||||
|
|
2r |
||||||||||||||||||||||||
|
|
|
|
|
R2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
формуле: T |
= |
1 |
|
P2 |
V 2 |
|
+ |
1 |
|
J |
2 |
w2 , где J |
2 |
– осевой момент инерции катка 2, ω |
2 |
– |
||||||||||
|
|
|
|
|||||||||||||||||||||||
2 |
2 g |
C2 |
2 |
|
|
|
2 |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
угловая скорость катка, VC2 |
– |
абсолютная скорость центра масс катка 2. |
|
|
||||||||||||||||||||||
Движение грузов 1 и 6 поступательное, их кинетические энергии вычис- |
||||||||||||||||||||||||||
ляются по формулам: T = |
|
P1 |
|
V 2 , |
T = |
P6 |
V 2 |
. При этом, скорость груза 1 равна |
||||||||||||||||||
|
2g |
2g |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
6 |
|
6 |
= x2 |
+ x3 , а скорость груза 6 равна |
|||||||
абсолютной скорости центра катка 2: V1 =VC2 |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
& |
& |
|
|
скорости платформы: V6 = V3 = x&3.
Выразим кинетическую энергию системы через обобщённые скорости.
Кинетическая энергия системы равна:
T= T1 + T2 + T3 + T4 + T5 + T6 =
=2Pg1 V12 + 12 Pg2 VC22 + 12 J2w22 + 2Pg3 V32 + 12 J4w24 + 12 Pg5 VC25 + 12 J5w52 + 2Pg6 V62 ,
где значения скоростей V1 |
= x2 |
+ x3 , |
|
VC2 = x2 |
+ x3 , w2 = |
x& |
2 |
, |
V3 = x3 , w4 = |
x&3 |
, |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
& |
& |
|
|
|
& |
|
& |
|
|
2r |
|
& |
2r |
|
|
|
|
1 |
|
|
|
|
|
|
|
x3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
VC5 = |
|
x3, |
|
w5 = |
& |
, |
V6 |
= x3 |
. Значения |
осевых |
моментов |
инерции катков |
|||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||
|
|
2 |
& |
|
|
|
|
|
|
4r |
|
|
|
& |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
P R |
2 |
|
|
4Pr 2 |
|
|
|
P R2 |
|
4Pr 2 |
|
|
P R2 |
|
4Pr 2 |
|
|
|
|
|
|
|
||||||
J2 = |
|
2 |
|
2 |
|
= |
|
|
, J4 = |
4 |
4 |
= |
|
|
, |
J5 = |
5 |
5 |
= |
|
. Подставляя значения |
||||||||
|
2g |
|
|
g |
2g |
g |
2g |
g |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
скоростей, моментов инерции и данные задачи, получим выражение кинетиче-
ской энергии системы в виде
|
P |
|
|
|
|
|
|
2 |
|
|
1 |
|
|
|
2P |
|
|
|
|
|
|
|
2 |
|
|
1 |
|
|
4 Pr |
2 æ x& |
2 |
|
ö2 |
|
|
|
3P |
|
|
|
||||||||||||||||
T = |
|
|
|
(x& |
|
+ x& |
|
) |
|
+ |
|
|
× |
|
|
|
|
(x& |
|
|
+ x& |
) |
+ |
|
|
× |
|
|
|
|
|
ç |
|
|
|
÷ |
+ |
|
|
|
|
x& |
2 |
+ |
||||||||||||
2g |
|
|
|
2 |
|
|
g |
|
|
|
2 |
g |
|
|
|
|
|
|
|
|
|
2g |
|
|
||||||||||||||||||||||||||||||||
|
|
2 |
|
3 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
è 2r ø |
|
|
|
|
3 |
|
|||||||||||||||||||||
|
1 |
|
|
4 Pr |
2 |
|
& |
|
ö |
2 |
|
|
|
1 |
|
|
|
|
|
& |
|
ö |
2 |
|
1 |
|
|
4 Pr |
2 |
|
|
|
& |
|
ö |
2 |
|
|
P |
|
|
|
|
|
||||||||||||
+ |
× |
|
|
æ x |
3 |
|
+ |
|
× |
2P æ x |
3 |
|
+ |
× |
|
|
|
æ x |
3 |
+ |
|
|
x& |
2 |
= |
|
||||||||||||||||||||||||||||||
|
|
|
|
|
ç |
|
|
÷ |
|
|
|
|
|
|
|
ç |
|
|
÷ |
|
|
|
|
|
|
|
|
ç |
|
|
|
|
÷ |
|
|
|
|
|
||||||||||||||||||
2 |
|
g |
|
|
|
|
|
|
2 |
|
g |
|
2 |
|
2 |
|
|
g |
|
|
|
4r |
|
|
2g |
|
|
|||||||||||||||||||||||||||||
|
|
|
|
è |
2r ø |
|
|
|
|
|
|
è |
ø |
|
|
|
|
|
|
è |
|
ø |
|
|
|
3 |
|
|
||||||||||||||||||||||||||||
151
= 12 Pg x&22 + 32Pg (x&2 + x&3 )2 + 238gP x&32 = 2gP x&22 + 3gP x&2 x&3+ 358gP x&32 .
Дадим системе возможное перемещение по координате x3, оставляя коор-
динату x2 без изменения:δx3 > 0, δx2 = 0 (рис. 6.18). При таком перемещении ка-
ток 2 стоит на платформе и движется поступательно вместе с ней. В этом случае
работа сил тяжести P2 , P5 ,
P3 катков 2, 5 и платформы 3
равна нулю, так как переме-
щения точек приложения
этих сил перпендикулярны векторам сил (см. рис. 6.18).
Работа силы тяжести P4 рав-
Рис. 6.18. Возможное перемещение системы |
на нулю, так как точка при- |
|
при вариации обобщённых координат δх3>0, δх2=0 |
||
ложения силы лежит на не- |
||
|
||
подвижной оси вращения блока 4. |
|
|
Работу будут производить сила F , пара сил с моментом М и силы тяже- |
||
сти грузов P1 и P6 . Суммарная работа сил δA = −Fδx3 − Mδϕ4 + P1δx3 + P6δx3 .
Представим соотношение ω4 = 2x&3r между угловой скоростью блока 4 и
скоростью платформы в дифференциальном виде dϕ4 = dx2r3 . Поскольку диф-
ференциалы координат также являются возможными перемещениями, получим нужное соотношение δϕ4 = δ2xr3 . Теперь элементарную работу сил на возмож-
ном перемещении δx3 с учётом значений сил и момента можно представить в виде: δA = −Pδx3 − 3Pr δ2xr3 + Pδx3 + Pδx3 = − 12 Pδx3 , откуда обобщённая сила,
соответствующая координате x3 , Qx3 = – 12 P .
152