

MetodTM2
.pdf5.ДИНАМИКА МЕХАНИЧЕСКОЙ СИСТЕМЫ
5.1.Описание движений твёрдых тел на основе общих теорем динамики
системы Поступательное движение твердого тела описывается теоремой о дви-
жении центра масс механической системы. В проекциях на координатные оси дифференциальные уравнения поступательного движения твердого тела имеют
вид: m&x& |
= å F e |
, |
m&y& |
= å F e |
, |
m&z& = åF e |
, где m – масса тела; |
x |
C |
, y |
C |
,z |
C |
– |
|||
C |
kx |
|
C |
ky |
|
C |
|
|
kz |
|
|
|
|
|
|||
координаты центра масс тела; F e |
, F e |
, |
F e |
– проекции на оси координат внеш- |
|||||||||||||
|
|
|
|
|
kx |
ky |
|
kz |
|
|
|
|
|
|
|
|
|
них сил, действующих на твердое тело.
Вращательное движение твердого тела относительно неподвижной оси
z описывается теоремой об изменении кинетического момента.
Дифференциальное уравнения вращательного движения тела имеет вид:
|
dω |
e |
|
e |
|
|
J z |
|
=åM z (Fk ) или |
J z ϕ = å M z (Fk ), |
|
||
dt |
|
|||||
где ω – угловая скорость тела; |
& |
&& |
e |
) – |
||
|
||||||
ω = ϕ; ϕ |
– угол поворота тела; åM z (Fk |
|||||
моменты внешних сил относительно оси z; |
Jz – момент инерции тела относи- |
|||||
тельно оси z. |
|
|
|
|
||
Уравнение вращательного движения можно представить в алгебраической |
||||||
|
e |
|
|
& |
|
|
форме: J zε = åM z (Fk ), где ε – угловое ускорение тела; ε = ω. |
|
|||||
Плоскопараллельное движение твердого тела описывается на основа-
нии теорем о движении центра масс и изменении кинетического момента отно-
сительно оси, проходящей через центр масс перпендикулярно плоскости дви-
жения. В проекции на координатные оси уравнения плоскопараллельного дви-
жения тела имеют вид:
ma = åF e |
, ma |
Cy |
= åF e |
, |
J |
zC |
ε = å M |
zC |
(F e ), |
|
Cx |
kx |
|
ky |
|
|
|
k |
|||
где aCx , aCy – проекции ускорения центра масс тела на координатные оси; Fkxe ,
103
Fkye – проекции на оси координат внешних сил, действующих на тело; J zC –
момент инерции тела относительно оси z, проходящей через центр масс, пер-
пендикулярно плоскости движения; ε – угловое ускорение тела; M zC (Fke ) –
моменты внешних сил относительно оси, проходящей через центр масс.
Проводя динамический расчет механической системы, следует рассмат-
ривать движение тел системы в отдельности, предварительно освободив их от связей и заменив действие связей реакциями. Далее на основании общих теорем динамики системы следует составить уравнения движения каждого тела.
5.2. Задание Д4. Динамический расчет механической системы
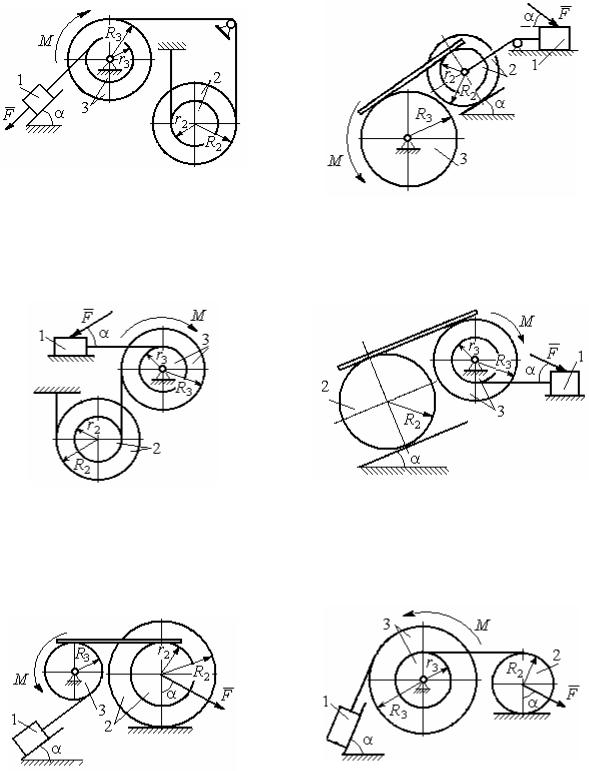
Механизм состоит из трёх тел – груза 1, катка 2 и блока 3, соединенных нерастяжимыми нитями или невесомыми стержнями.
Движение механизма происходит в вертикальной плоскости под действи-
ем сил тяжести P1 , P2 , P3 , силы F и пары сил с моментом М. Направление дей-
ствия силы F определяется углом α. Качение катка 2 происходит без скольже-
ния. Проскальзывание между дисками и соединяющими их невесомыми стерж-
нями или нитями отсутствует.
Сплошные диски считать однородными. Радиусы ступеней катка 2 и бло-
ка 3 на схемах обозначены R2 , r2 и R3 , r3.
Радиусы инерции неоднородных (ступенчатых) дисков относительно осей, проходящих через центры масс перпендикулярно плоскости движения равны iz2 , iz3 .
Найти ускорение груза 1 и динамические реакции, действующие на ось блока 3.
Варианты заданий представлены на рис. 5.1 – 5.2. Исходные данные при-
ведены в табл. 5.1.
104
Варианты № 1, 11, 21 |
Варианты № 2, 12, 22 |
|
|
|
|
|
|
Варианты № 3, 13, 23 |
Варианты № 4, 14, 24 |
|
|
|
|
|
|
Варианты № 5, 15, 25 |
Варианты № 6, 16, 26 |
|
|
|
|
Рис. 5.1. Задание Д4. Динамический расчёт механической системы. Номера вариантов задания 1 – 6, 11 – 16, 21 – 26
105
|
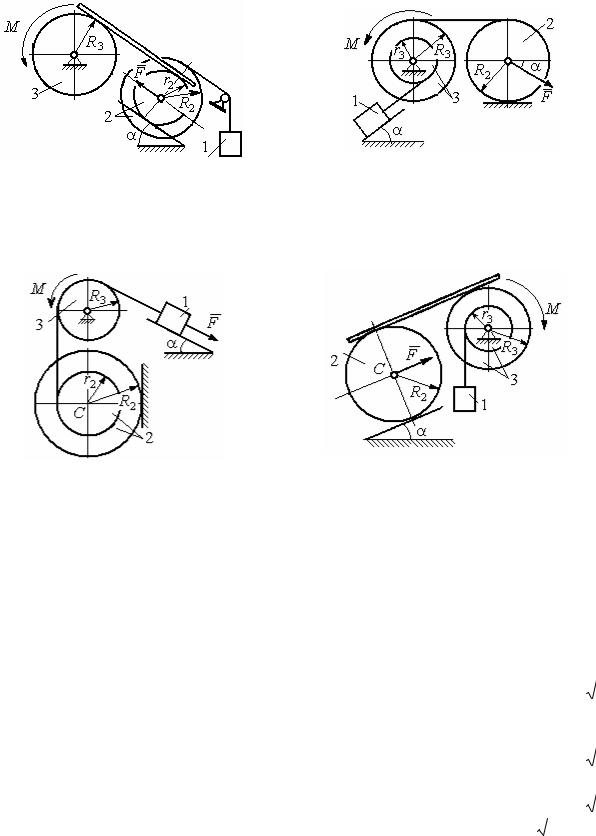
Окончание вариантов задания Д4 |
Варианты № 7, 17, 27 |
Варианты № 8, 18, 28 |
|
|
|
|
Варианты № 9, 19, 29 |
Варианты № 10, 20, 30 |
|
|
|
|
Рис. 5.2. Задание Д4. Динамический расчёт механической системы. Номера вариантов задания 7 – 10, 17 – 20, 27 – 30
Таблица 5.1
Исходные данные задания Д4. Динамический расчёт механической системы
Номер |
Р1, Н |
Р2, Н |
Р3, Н |
F, Н |
М, |
α , |
R2, м |
r2, м |
R3, м |
r3, м |
iz 2 , м |
iz3 , м |
||||
варианта |
Н·м |
град |
||||||||||||||
задания |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
Р |
Р |
2Р |
Р |
2Рr |
60 |
3r |
r |
2r |
r |
2r |
r |
|
|
||
2 |
||||||||||||||||
2 |
3Р |
Р |
3Р |
3Р |
Рr |
30 |
2r |
r |
2r |
– |
2r |
– |
||||
3 |
4Р |
3Р |
4Р |
2Р |
2Рr |
60 |
2r |
r |
2r |
r |
2r |
2r |
||||
4 |
2Р |
2Р |
4Р |
Р |
4Рr |
45 |
3r |
– |
3r |
r |
– |
r |
|
|
||
2 |
||||||||||||||||
5 |
Р |
3Р |
3Р |
2Р |
3Рr |
30 |
3r |
r |
r |
– |
2r |
– |
||||
6 |
Р |
2Р |
4Р |
4Р |
6Рr |
60 |
3r |
– |
3r |
r |
– |
r |
|
|
||
2 |
||||||||||||||||
7 |
Р |
2Р |
3Р |
2Р |
3Рr |
45 |
3r |
r |
r |
- |
r |
|
|
– |
||
3 |
||||||||||||||||
106

Окончание табл. 5.1
Номер |
Р1, Н |
Р2, Н |
Р3, Н |
F, Н |
М, |
α , |
R2, м |
r2, м |
R3, м |
r3, м |
iz 2 , м |
iz3 , м |
||||||||
варианта |
Н·м |
град |
||||||||||||||||||
задания |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
2Р |
3Р |
3Р |
Р |
3Рr |
30 |
2r |
– |
2r |
r |
– |
r |
|
|
|
|||||
3 |
||||||||||||||||||||
9 |
3Р |
Р |
3Р |
Р |
2Рr |
30 |
2r |
r |
2r |
– |
r |
|
|
|
|
– |
||||
2 |
|
|||||||||||||||||||
10 |
Р |
Р |
3Р |
Р |
2Рr |
60 |
3r |
– |
3r |
r |
– |
r |
|
|
|
|||||
3 |
||||||||||||||||||||
11 |
Р |
Р |
3Р |
2Р |
3Рr |
30 |
3r |
2r |
2r |
r |
r |
|
|
|
|
r |
|
|
|
|
2 |
|
2 |
||||||||||||||||||
12 |
2Р |
Р |
2Р |
4Р |
Рr |
60 |
3r |
r |
3r |
– |
r |
|
|
– |
||||||
3 |
||||||||||||||||||||
13 |
3Р |
Р |
3Р |
3Р |
2Рr |
30 |
3r |
2r |
2r |
r |
2r |
r |
|
|
|
|
||||
2 |
||||||||||||||||||||
14 |
2Р |
Р |
3Р |
2Р |
4Рr |
60 |
2r |
– |
3r |
2r |
– |
2r |
||||||||
15 |
Р |
2Р |
4Р |
Р |
4Рr |
45 |
3r |
2r |
2r |
– |
r |
|
|
– |
||||||
3 |
||||||||||||||||||||
16 |
Р |
3Р |
4Р |
2Р |
3Рr |
30 |
2r |
– |
2r |
r |
– |
r |
|
|
|
|
||||
2 |
||||||||||||||||||||
17 |
Р |
Р |
3Р |
2Р |
6Рr |
60 |
3r |
r |
3r |
- |
r |
|
|
|
|
|
|
|
||
3 |
|
|
|
|
|
|||||||||||||||
18 |
2Р |
2Р |
3Р |
Р |
3Рr |
60 |
2r |
– |
3r |
r |
– |
r |
|
|
|
|
||||
2 |
||||||||||||||||||||
19 |
2Р |
Р |
2Р |
3Р |
4Рr |
30 |
3r |
r |
3r |
– |
2r |
– |
||||||||
20 |
Р |
Р |
3Р |
Р |
2Рr |
45 |
2r |
– |
2r |
r |
– |
r |
|
|
||||||
3 |
||||||||||||||||||||
21 |
2Р |
Р |
4Р |
2Р |
4Рr |
60 |
2r |
r |
3r |
r |
r |
|
|
|
|
2r |
||||
2 |
||||||||||||||||||||
22 |
Р |
Р |
2Р |
5Р |
2Рr |
45 |
3r |
2r |
2r |
– |
2r |
– |
||||||||
23 |
2Р |
2Р |
3Р |
3Р |
2Рr |
60 |
3r |
r |
2r |
r |
2r |
r |
|
|
|
|
||||
2 |
||||||||||||||||||||
24 |
4Р |
Р |
3Р |
Р |
3Рr |
30 |
2r |
– |
3r |
r |
– |
r |
|
|
||||||
3 |
||||||||||||||||||||
25 |
Р |
3Р |
2Р |
Р |
2Рr |
60 |
3r |
r |
r |
– |
r |
|
|
– |
||||||
3 |
||||||||||||||||||||
26 |
Р |
3Р |
4Р |
3Р |
3Рr |
45 |
2r |
– |
3r |
2r |
– |
r |
|
|
||||||
3 |
||||||||||||||||||||
27 |
Р |
Р |
4Р |
2Р |
4Рr |
30 |
2r |
r |
2r |
- |
r |
|
|
|
|
|
|
|
||
3 |
|
|
|
|
|
|||||||||||||||
28 |
2Р |
3Р |
3Р |
Р |
6Рr |
30 |
2r |
– |
3r |
2r |
– |
r |
|
|
|
|
||||
2 |
||||||||||||||||||||
29 |
2Р |
Р |
2Р |
2Р |
2Рr |
45 |
2r |
r |
r |
– |
2r |
– |
||||||||
30 |
Р |
Р |
4Р |
Р |
4Рr |
60 |
3r |
– |
3r |
2r |
– |
2r |
||||||||
Пример выполнения задания Д4. Динамический расчёт механической системы
Механизм (рис. 5.3) состоит из груза 1, однородного диска – катка 2 и не-
однородного диска – блока 3, соединённых друг с другом нерастяжимыми ни-
тями. Система движется в вертикальной плоскости из состояния покоя.
Движение происходит под действием сил тяжести P1, P2 , P3 , равных по
модулю: Р1 = 2Р, |
Р2 = 2Р, |
Р3 = 3Р, силы F , |
приложенной в центре масс |
катка 2, равной по |
величине: |
F = 3Р, и пары |
сил с моментом М = Рr, |
|
|
107 |
|
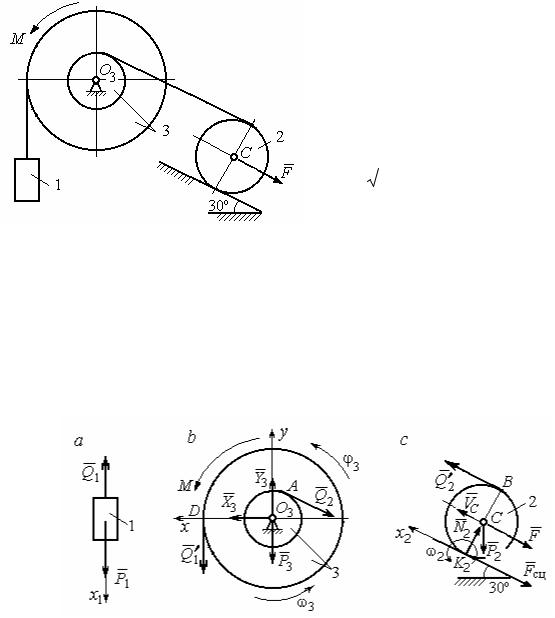
приложенных к блоку 3. Механизм является неизменяемой механической сис-
темой. Радиус катка 2 R2 = 2r . Каче- |
||
ние катка по наклонной плоскости |
||
происходит без проскальзывания. Ра- |
||
диусы ступенчатого блока 3: R3 = 3r , |
||
r3 = r . |
|
Радиус инерции блока 3 |
i3 = r |
|
. Найти ускорение груза 1 и |
3 |
||
динамические реакции, действующие |
||
Рис. 5.3. Схема механической системы |
на ось вращающегося блока 3, с по- |
|
|
мощью метода динамического расчета механической системы. |
|
Решение
Освобождаем систему от связей. На рис. 5.4 изображены внешние силы,
действующие на каждое тело, после освобождения его от связей.
Рис. 5.4. Расчетные схемы для описания движения тел, входящих в систему:
а– поступательное движение груза 1; b – вращательное движение блока 3;
с– плоское движение катка 2
Груз 1 совершает поступательное движение. К нему приложены сила тя-
жести P1 и реакция нити (натяжение) Q1 (рис. 5.4, а). Предположим, груз 1
движется вниз, и направим ось x1 в сторону движения груза.
Уравнение движения груза вдоль оси x1 в соответствии с теоремой о дви-
жении центра масс механической системы имеет вид:
108

m1a1 = å Fkx = P1 − Q1 = 2P − Q1 ,
где m1, a1 – соответственно, масса груза 1 и его ускорение, m1 = Pg1 = 2gP .
Блок 3 вращается вокруг неподвижной оси z , проходящей через его центр масс О3, перпендикулярно плоскости диска. Направление вращения блока, со-
ответствующее выбранному движению вниз груза 1, показано на рис. 5.4, b ду-
говой стрелкой ω3 .
На блок действуют сила тяжести P3 , силы реакции подшипника X 3 , Y3 ,
момент М и натяжения нитей Q1′ и Q2 (рис. 5.4, b). При составлении уравнения вращательного движения блока 3 моменты сил считаем положительными, если
они поворачивают блок в сторону его вращения.
Уравнение вращения блока 3 имеет вид:
J zO3 ε3 = åM zO3 (Fk )= Q1′R3 + M − Q2r3 = Q13r + Pr− Q2r ,
где J zO |
– момент инерции блока 3 относительно оси z; ε3 – угловое ускорение |
||||||||||||
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
9Pr 2 |
|
||
|
|
|
|
|
|
|
|
||||||
диска 3, |
J |
zO |
|
= m i2 |
= |
|
3 |
(r 3)2 = |
|
|
. |
||
|
|
|
|
|
|||||||||
|
|
3 |
3 3 |
|
g |
|
g |
|
|||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Каток 2 совершает плоскопараллельное движение. К нему приложены си- |
|||||||||||||
ла тяжести P2 , сила F , |
|
|
|
|
|
|
′ |
||||||
реакция нити Q2 и реакция наклонной плоскости, со- |
|||||||||||||
стоящая из нормальной реакции |
N2 и силы сцепления катка с поверхностью |
||||||||||||
Fсц . Согласно принципу равенства действия и противодействия модули сил Q2
и Q2′ равны. На рис. 5.4, с показаны направления действия сил, приложенных к диску 2. В соответствии с выбранным направлением движения груза 1, центр масс катка 2 движется вверх параллельно наклонной плоскости. Направление движения центра масс катка 2 показано направлением оси х2, направление вра-
щения катка 2 – угловой скоростью ω2 (см. рис 5.4, с).
109
Плоскопараллельное движение катка 2 описывается уравнением движе-
ния его центра масс и уравнением вращения вокруг оси, проходящей через центр масс, перпендикулярно плоскости диска. Составляя уравнение движения
центра масс катка 2 в проекции на ось х2 и считая в уравнении вращательного движения диска момент силы положительным, если создаваемый им поворот направлен в сторону вращения диска, получим:
|
′ |
|
|
|
o |
|
||
|
m2aC = Q2 − F − Fсц − P2cos60 |
=Q2 − 3P − Fсц − P , |
||||||
|
|
|||||||
|
|
|
′ |
+ Fсц R2 = Q2 2r + Fсц 2r , |
||||
|
JC ε2 = Q2 R2 |
|||||||
где m2 |
– масса катка 2, m2 = |
P2 |
= |
2P |
; aC – ускорение центра масс катка 2; e2 – |
|||
g |
g |
|||||||
|
|
|
|
|
|
|||
угловое ускорение катка 2; JC |
– момент инерции однородного катка 2 относи- |
|||||||
тельно оси, проходящей через центр масс, перпендикулярно плоскости диска,
|
m |
R2 |
|
PR2 |
|
4Pr 2 |
|
JC = |
|
2 2 |
= |
2 |
= |
|
. |
|
2 |
g |
g |
||||
|
|
|
|
|
К системе четырех уравнений, описывающих движения тел в системе, не-
обходимо добавить уравнения связей. Если предположить, что скорость центра масс катка 2 равна VC , то угловая скорость катка определится по формуле:
ω2 = |
VC |
= |
VC |
, где CK2 – расстояние от центра масс катка 2 до его мгновен- |
CK2 |
|
|||
|
|
R2 |
||
ного центра скоростей (см. рис. 5.4, с). Продифференцировав по времени по-
следнее равенство, получим уравнение связи между ускорением центра масс
|
|
|
V& |
|
|
|
a |
C |
|
|
|
a |
C |
|
|
|
|
|
|
катка 2 и его угловым ускорением ε2 = ω2 = |
C |
|
= |
|
|
= |
|
|
. |
|
|
|
|
||||||
& |
|
|
R2 |
|
R2 |
|
|
|
2r |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Скорость точки В катка 2 (см. рис. 5.4, с) можно выразить через скорость |
|||||||||||||||||||
его центра масс следующим образом: V |
B |
= w |
2 |
× BK |
2 |
= |
VC |
2R |
2 |
= |
2V . Точка В |
||||||||
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
R2 |
|
C |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
катка 2 и точка А блока 3 соединены нитью (см. рис. 5.3), поэтому их скорости
110

равны. Приравняв скорость точки А к скорости точки В, получим равенство: 2VC = VB = VA = ω3r3 = ω3r , откуда ω3 = 2VrC .
После дифференцирования последнего выражения найдём соотношение между ускорениями: ε3 = 2arC .
Скорость груза 1 связана со скоростью центра масс диска 2 следующим образом: V1 = VD = ω3R3 = 2VrC 3r = 6VC . Тогда a1 = 6aC . В результате получены четыре уравнения, описывающие движение груза 1, блока 3 и катка 2:
|
|
|
|
2P |
a = 2P − Q , |
|
9Pr |
2 |
ε |
|
|
= Q 3r + Pr− Q r , |
|
|||||||||||
|
|
|
|
|
g |
|
g |
|
|
|
|
|||||||||||||
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
3 |
|
1 |
|
|
|
2 |
|
||||
|
2P |
a |
C |
= Q − 3P − F − P , |
|
|
4Pr 2 |
ε |
2 |
= Q 2r + F 2r |
||||||||||||||
|
|
|
|
|
||||||||||||||||||||
|
g |
|
2 |
|
|
aC |
сц |
|
|
2aC |
|
|
g |
|
|
|
2 |
сц |
||||||
и три уравнения связей: ε |
2 |
= |
, ε |
3 |
= |
|
, a |
= 6a |
C |
. |
|
|||||||||||||
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
2r |
|
|
|
r |
|
|
1 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
После подстановки уравнений связи в уравнения движения тел, получим
систему четырёх уравнений с четырьмя неизвестными:
|
12P |
|
a |
C |
= 2P − Q , |
18P |
a |
C |
= 3Q + P − Q |
2 |
, |
|||
|
|
|
||||||||||||
|
|
g |
1 |
g |
|
|
1 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
2P |
a |
C |
=Q − 4P − F , |
P |
a |
C |
= Q + F . |
|
||||
|
|
|
|
|
||||||||||
|
|
g |
2 |
сц |
g |
|
2 сц |
|
|
|||||
Исключим из первых двух уравнений неизвестную величину Q1 , а из третьего и четвёртого уравнений – величину Fсц . С этой целью умножим первое
уравнение на 3 и сложим со вторым. Третье уравнение сложим с четвертым.
Получим систему двух уравнений |
54P |
a |
C |
= 7P − Q |
|
, |
3P |
a |
C |
= 2Q − 4P , откуда: |
|
|
|
||||||||
|
g |
|
2 |
|
g |
2 |
||||
aC = 11110 g , Q2 = 3779 P . Величину натяжения нити Q1 находим из первого урав-
нения исходной системы: Q1 = 3734 P .
111

Динамические реакции X 3 , Y3 , действующие на ось вращающегося бло-
ка 3 (рис. 5.4, b), определяются из уравнений, которые можно получить, приме-
нив теорему о движении центра масс.
Так как центр масс блока 3 неподвижен, его ускорение равно нулю и уравнения движения центра масс блока 3 в проекциях на оси x, y имеют вид:
m3aO3x = X 3 − Q2cos 30o = 0 , m3aO3 y = Y3 − Q1 − P3 − Q2cos60o = 0 .
Отсюда, с учетом значений Q1 = 3437 P и Q2 = 3779 P , динамические реакции
оси блока 3 равны: X3 = Q2cos30o = 1,85Р, Y3 = Q1 + P3 + Q2cos60o = 4,98Р.
Полная величина динамической реакции оси блока 3
R3 = 
 X 32 + Y32 = 5,31Р.
X 32 + Y32 = 5,31Р.
5.3. Теорема об изменении кинетической энергии системы.
|
|
Кинетическая энергия |
тела при |
поступательном |
движении: |
|||
T = |
1 |
mV 2 |
, где m – масса тела; V |
– скорость центра масс тела. Кинетическая |
||||
|
||||||||
|
2 |
C |
|
C |
|
|
|
|
|
|
|
|
|
|
|
||
энергия тела |
при вращательном движении |
вокруг неподвижной оси z: |
||||||
T = |
1 |
J zω2 |
, где |
J z – момент инерции тела относительно оси z; |
ω – угловая |
|||
2 |
||||||||
|
|
|
|
|
|
|
||
скорость тела. Для дисков с равномерно распределённой массой момент инер-
ции относительно оси z, проходящей через центр масс: J z = 12 mR2 , где R – ра-
диус диска. Для тел с неравномерно распределённой массой J z = miz2 , где iz –
радиус инерции. Кинетическая энергия тела при плоскопараллельном дви-
жении: T = |
1 |
mV 2 |
+ |
1 |
J |
|
ω2 |
, где m – масса тела; V , ω – скорость центра масс |
2 |
2 |
|
||||||
|
C |
|
|
zС |
|
C |
||
и угловая скорость тела; J zС |
– момент инерции тела относительно оси z, прохо- |
|||||||
дящей через центр масс перпендикулярно плоскости движения.
112