

16 Равновесие при наличии сил трения. Коэфициент трения. Конус трения.
Равновесие при наличии трения скольжения
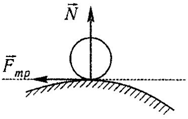
При скольжении тела по шероховатой поверхности возникает сила реакции, которая имеет две составляющие – нормальную и силу трения скольжения (рисунок 2.1). Сила трения скольжения, приложенная к одному из трущихся тел, направлена противоположно его скорости относительно второго тела.
Максимальное значение силы трения скольжения не зависит от площади контакта, а определяется величиной нормальной реакции, материалом и состоянием контактирующих поверхностей;
Fтрmax = fN,
где f – коэффициент трения скольжения, который является безразмерной величиной и зависит от материала и физического состояния трущихся поверхностей, а также от скорости движения тела и удельного давления.
наибольший угол между полной реакцией, построенной на наибольшей силе трения при данной нормальной реакции и направлением нормальной реакции, называется углом трения φ:
tgφ = Fтрmax/N = fN/N = f.

Конус трения – поверхность, образованная линией действия максимальной реакции опорной поверхности при движении тела в различных направлениях (рисунок 2.2).
При равновесии тела на шероховатой поверхности под действием силы P (рисунок 2.3) можно составить два уравнения равновесия:
ΣFkx = 0; Psinα - Fтр = 0;
ΣFky = 0; - Pcosα + N = 0.
Следовательно,

17 Аксиомы статики
1. Аксиома инерции
Под действием уравновешенной системы сил материальная точка (тело) находится в состоянии покоя или движется равномерно и прямолинейно.
2. Аксиома равновесия двух сил
Абсолютно твердое тело находится в равновесии под действием двух сил тогда и только тогда, когда эти силы равны по модулю, действуют по одной прямой и направлены в противоположные стороны.
3. Аксиома присоединения и исключения уравновешивающихся сил
Не нарушая состояния абсолютно твердого тела, к нему можно прикладывать или отбрасывать от него уравновешенную систему сил.
4. Аксиома параллелограмма сил
Две силы, приложенные к телу в одной точке, имеют равнодействующую, проходящую через эту точку и равную их геометрической сумме.
5. Аксиома равенства действия и противодействия
Силы взаимодействия двух тел равны по модулю и направлены по одной прямой в противоположные стороны.
6. Аксиома о сохранении равновесия сил, приложенных к деформируемому телу
Равновесие деформируемого тела не нарушится, если это тело отвердеет.
18 частные случаи приведения произвольной пространственной системы сил
В результате приведения пространственной системы сил к произвольному центру О возможны следующие случаи, зависящие от векторов R и LO:
если R = 0, LO = 0, то заданная система является равновесной;
если хотя бы одна из величин R или LO не равна нулю, то система сил не находится в равновесии. При этом:
Eсли R = 0 и LO
 0,
то система сил приводится к одной паре
сил с моментомLO.
В этом случае величина моментаLO не
зависит от выбора центра О.
0,
то система сил приводится к одной паре
сил с моментомLO.
В этом случае величина моментаLO не
зависит от выбора центра О.Eсли R
 0, LO =
0, то система сил приводится к
равнодействующей силе R* = R,
линия действия которой проходит через
центр О.
0, LO =
0, то система сил приводится к
равнодействующей силе R* = R,
линия действия которой проходит через
центр О.Eсли R
 0, LO
0, LO  0
и эти векторы взаимно перпендикулярны,
то система сил также приводится к
равнодействующей силеR* = R,
но линия ее действия не проходит через
центр О.
ПримерМатематически
условие перпендикулярности
векторовR и LO выражается
равенством нулю их скалярного
произведения:
0
и эти векторы взаимно перпендикулярны,
то система сил также приводится к
равнодействующей силеR* = R,
но линия ее действия не проходит через
центр О.
ПримерМатематически
условие перпендикулярности
векторовR и LO выражается
равенством нулю их скалярного
произведения:
R · LO = Rx · LOx + Ry · LOy + Rz · LOz = 0.
В частности, этот
случай будет всегда иметь место для
любой системы параллельных сил и любой
плоской системы сил, если главные
векторы этих систем не равны нулю.
Eсли R
 0, LO
0, LO 0
и эти векторы параллельны, то система
сил приводится к совокупности силы R и
паре сил (P,P')
c векторным моментом LO (силы P, P'
лежат в плоскости, перпендикулярной
силе R,
см.рис.).
Такая совокупность силы
и пары сил называется динамическим
винтом, а
прямая, вдоль которой направлены
векторы R и LO,
называется осью
винта.
В
этом случае дальнейшее упрощение
системы сил невозможно, то есть ее
нельзя привести к одной (равнодействующей)
силе или к одной паре сил.
Математически
условие параллельности
векторов R и LO выражается
равенством нулю их векторного
произведения:
0
и эти векторы параллельны, то система
сил приводится к совокупности силы R и
паре сил (P,P')
c векторным моментом LO (силы P, P'
лежат в плоскости, перпендикулярной
силе R,
см.рис.).
Такая совокупность силы
и пары сил называется динамическим
винтом, а
прямая, вдоль которой направлены
векторы R и LO,
называется осью
винта.
В
этом случае дальнейшее упрощение
системы сил невозможно, то есть ее
нельзя привести к одной (равнодействующей)
силе или к одной паре сил.
Математически
условие параллельности
векторов R и LO выражается
равенством нулю их векторного
произведения:
R ![]() LO =
0,
LO =
0,
или, другими словами, пропорциональностью их проекций:
Rx = k · LOx; Ry = k · LOy; Rz = k · LOz.
Eсли R
 0,LO
0,LO  0
и эти векторы не параллельны друг
другу, то система сил также приводится
к динамическому винту , но ось винта
не будет проходить через точку О.
0
и эти векторы не параллельны друг
другу, то система сил также приводится
к динамическому винту , но ось винта
не будет проходить через точку О.