

Устойчивость
Конечно из того,
что (21) при
![]() стремится к (18) еще не следует, что их
решения будут сближаться. Как известно,
для сходимости, по крайней мере, в
линейном случае (
стремится к (18) еще не следует, что их
решения будут сближаться. Как известно,
для сходимости, по крайней мере, в
линейном случае (![]() ),
необходима еще устойчивость разностной
схемы. А поскольку в линейном случае
система (18) переходит в совокупность
простейших уравнений типа (1) (только
),
необходима еще устойчивость разностной
схемы. А поскольку в линейном случае
система (18) переходит в совокупность
простейших уравнений типа (1) (только![]() может быть и комплексным, т. е.
может быть и комплексным, т. е.![]() ),
при анализе устойчивости можно
ограничиться изучением (1). Чтобы избежать
громоздких выкладок и иметь возможность
графического представления некоторых
результатов, ограничимся также случаемK= 2 в (21).
),
при анализе устойчивости можно
ограничиться изучением (1). Чтобы избежать
громоздких выкладок и иметь возможность
графического представления некоторых
результатов, ограничимся также случаемK= 2 в (21).
Итак,
в случае модельного уравнения
![]() для обеспечения второго порядка
аппроксимации из (23) – (25) имеем:
для обеспечения второго порядка
аппроксимации из (23) – (25) имеем:
![]() (28)
(28)
Отсюда
![]() , (29)
, (29)
т. е. четыре
коэффициента
![]() произвольны,
а остальные четыре коэффициента
определяются соотношениями (28), (29).
произвольны,
а остальные четыре коэффициента
определяются соотношениями (28), (29).
Из (26) с учетом (23), (29) имеем для схем 3-го порядка
3(b11 + b22) – 1 – 6(b11b22 – b12b21) = 0, (30)
3[(b11 + b11) + (b21 + b21)] – 6(b22 + b21)(b11 + b12) – 2 = 0.
Для полуявных схем (b12= 0) (30) определяет однопараметрическое семейство схем 3-го порядка с коэффициентами
b22 = (1 – 3b11)/[(1 – 2b11)], b11 ![]() 1/2, (31)
1/2, (31)
b21 = 1/[3(1 – 2b11)],
а на 4-й порядок уже не хватает свободных коэффициентов.
Полагая
![]() ,
,![]() (σ — число Куранта), получим:
(σ — число Куранта), получим:
vn+1 = q vn, (32)
 .
.
Действительно, для модельного уравнения в (21) rk = vk,
v1 = vn + (b11v1 + b12v2 +…+ b1KvK),
v2 = vn + (b21v1 + b22v2 +…+ b2KvK),
..........................................
vK = vn + (bK1v1 + bK2v2 +…+ bKKvK).
Обозначая
v = {v1, …, vK},
vn = {vn, …, vn},
B =  ,
имеем (E – B)v = vn,
откуда v = (E – B)–1vn = Dvn,
D = {dkj}
(т. е.
vk = kvn =
,
имеем (E – B)v = vn,
откуда v = (E – B)–1vn = Dvn,
D = {dkj}
(т. е.
vk = kvn =![]() ).
Подставляя это в (21), и получим
(32).
).
Подставляя это в (21), и получим
(32).
Геометрическая прогрессия (32) будет совпадать с точным решениемvn+1=vne, еслиq() = e. Этот способ выбора коэффициентов в (21) называютметодом экспоненциальной подгонки, его обобщение на случай линейной системы (7) ограничен лишь возможностями отыскания спектра матрицыA, а в случае нелинейной системы (18) может быть использована линеаризация (18) на малом отрезке [tn, tn+1].
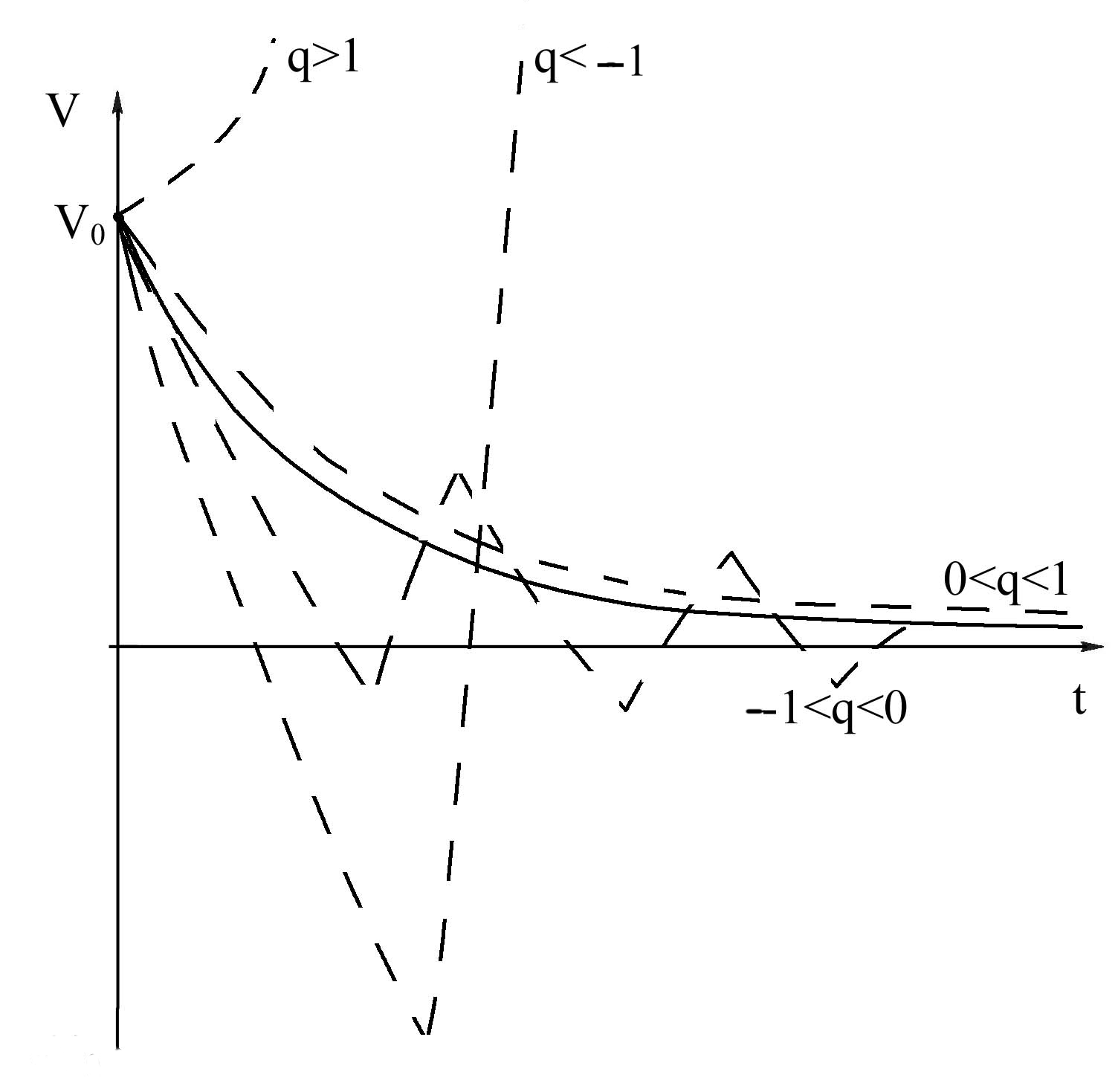
Так как мы рассматриваем здесь только случай Re < 0 (затухающие или устойчивые по Ляпунову решения), то при |q()| > 1 приближенное решение (32) не будет иметь ничего общего с точным решением. При действительных значенияхчисленное решение ведет себя, как показано штриховыми линиями на рис. 1.9 (точное решение — сплошная кривая).
Рис. 1.9
Вид численного решения при различных
q
|q()| ≤ 1. (33)
Для действительных это эквивалентно–1 < q() < 1.
Определение 1.2. Схема называется абсолютно устойчивой, если (33) выполняется при всех значениях
Определение 1.3. Схема называется монотонной, если для действительных выполняется 0 < q() < 1.
Если в комплексной плоскости (Re , Im ) нарисовать кривую |q()| = 1, то она будет ограничивать область устойчивости. Примеры областей устойчивости для явного и неявного методов Эйлера показаны (заштрихованы) на рис. 1.10а и рис. 1.10б соответственно.
|
| |
|
а |
б |
|
Рис. 1.10. Области устойчивости схем Эйлера | |
|
|
|
|
а |
б |
|
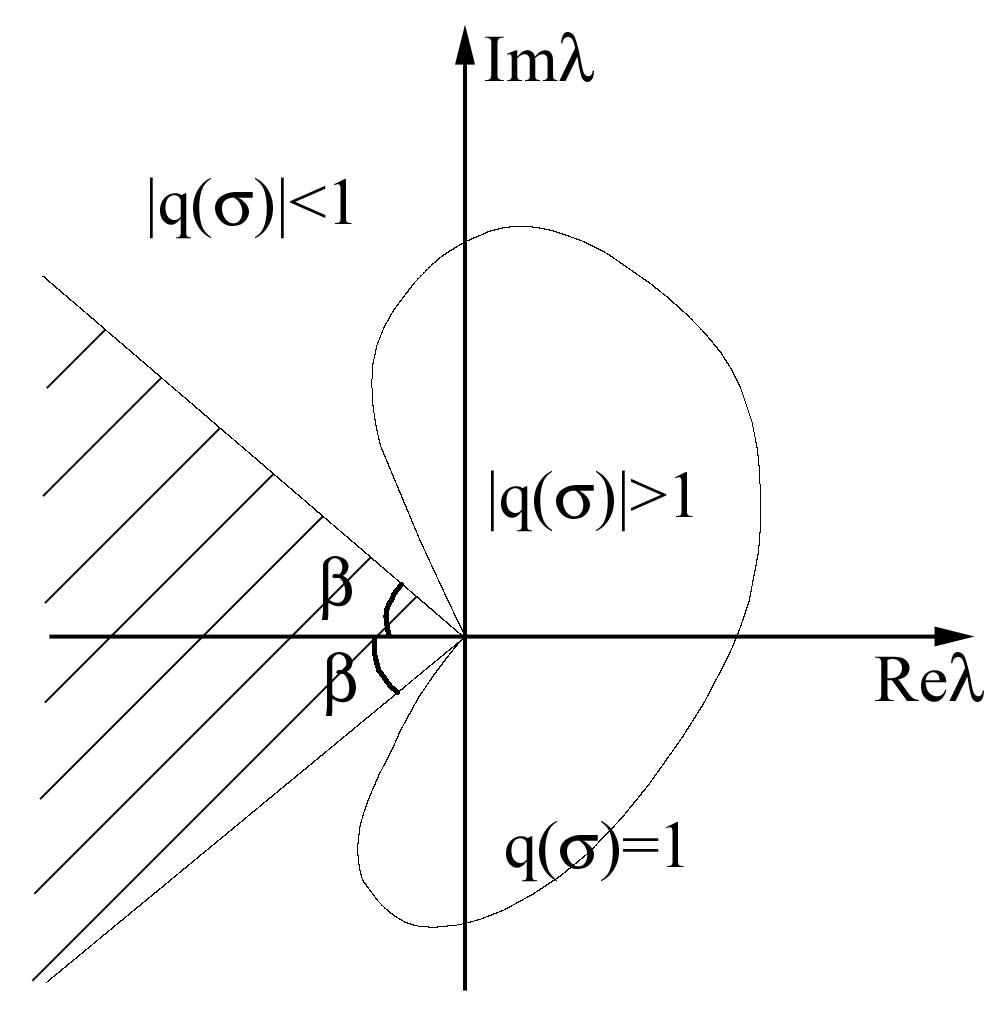
Рис. 1.11. Области устойчивости жёстко-устойчивых схем | |

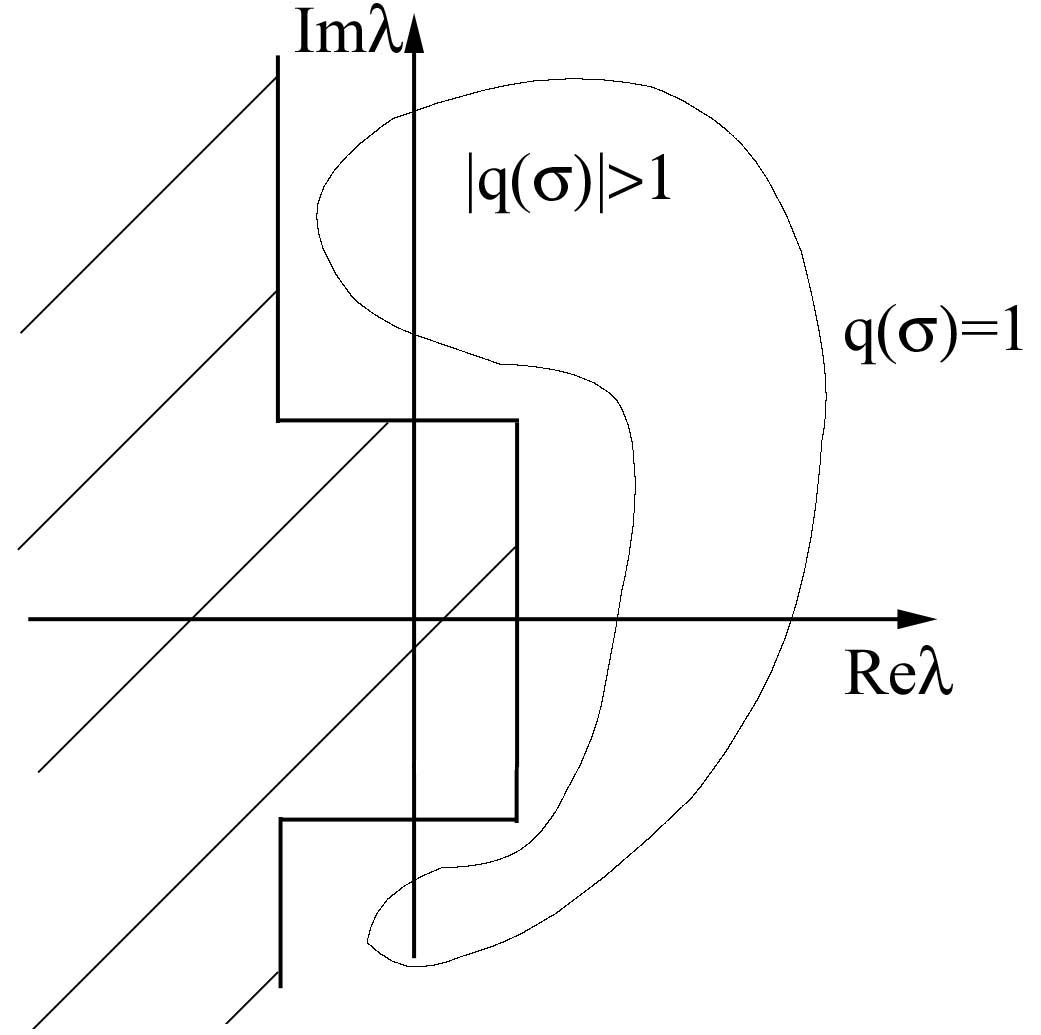
Для абсолютно устойчивых схем область устойчивости — вся комплексная плоскость . Таких схем на практике не существует, но для жестких уравнений этого и не нужно, достаточно, чтобы схема былаA-устойчивой (Далквист, 1963 г.), как, например, неявная схема Эйлера, рис. 1.10б.
Определение 1.4. Схема называется A-устойчивой, если кривая |q()| = 1 лежит в правой полуплоскости σ.
Это требование довольно тяжелое, поэтому его еще более ослабляют, требуя, чтобы кривая |q()| = 1 лежалавне заштрихованных на рис. 1.11а, б областей (Гир, 1969г.). Это есть разные определенияжестко-устойчивыхсхем. Действительно, для жесткой системы ОДУ (рис. 1.4г), если все Re j < 0, то при измененииот 0 довсе точкиjjна плоскости {Re, Im} будут двигаться по радиальным направлениям внутри некоторого угла 2β (рис. 1.11б), оставаясь внутри области устойчивости.
Величина Re q() определяет скорость затухания решения. При Re << –1 точное решение затухает очень быстро, значит и численный метод при ||(точнее, при Re–) должен обладать этим свойством.
Определение 1.5. Схема называется L-устойчивой (Ламберт, 1973 г.), если
|q()| 0 при || (34)
(илиRe q() 0приRe –).
Обобщение всех этих определений на случай линейной системы (7) очевидно, надо, чтобы соответствующие условия выполнялись для всех j= j(j— собственные значения матрицыA). Для общей нелинейной системы (18) все это должно выполнятся локально, при всехtn(принцип линеаризации и замораживания коэффициентов).