

Тема 3. Складний рух точки
У деяких випадках рухомі тіла, які приймаються за матеріальні точки, можуть чинити складний рух (наприклад, рух людиною у вагоні рухаючого потягу).
Складний рух точки – це рух точки відносно нерухомої системи координат.
Швидкість складного руху називається абсолютною швидкістю.
Складний рух точки складається з переносного поперечного руху, тобто рух рухомої системи координат відносно нерухомої (наприклад, рух потягу відносно Землі), та відносного руху, тобто рух точки відносно рухомої системи координат.
Таким чином швидкість абсолютного руху точки дорівнює геометричній сумі швидкостей переносного та відносного руху:
 (
теорема складання швидкостей)
(
теорема складання швидкостей)
Тема 4. Плоскопараллельний рух твердого тіла
Плоско паралельним рухом називається такий рух, при якому усі точки тіла переміщуються у плоскостях паралельно будь-якої однієї площини, називаної основною. Приклад такого руху: рух колеса автомобіля на прямій ділянці шляху, швидкість руху шатуна кривошипно-шатуного механізму.
Плоско паралельний рух вивчається двома методами:
Методом розкладу плоскопаралельного руху на поступальне
та обертове;
Методом миттєвих швидкостей.
В основі першого методу лежить теорема: будь-який плоско паралельний рух може бути отримано за допомогою одного поступового й одного обертового руху (рис 1.48).
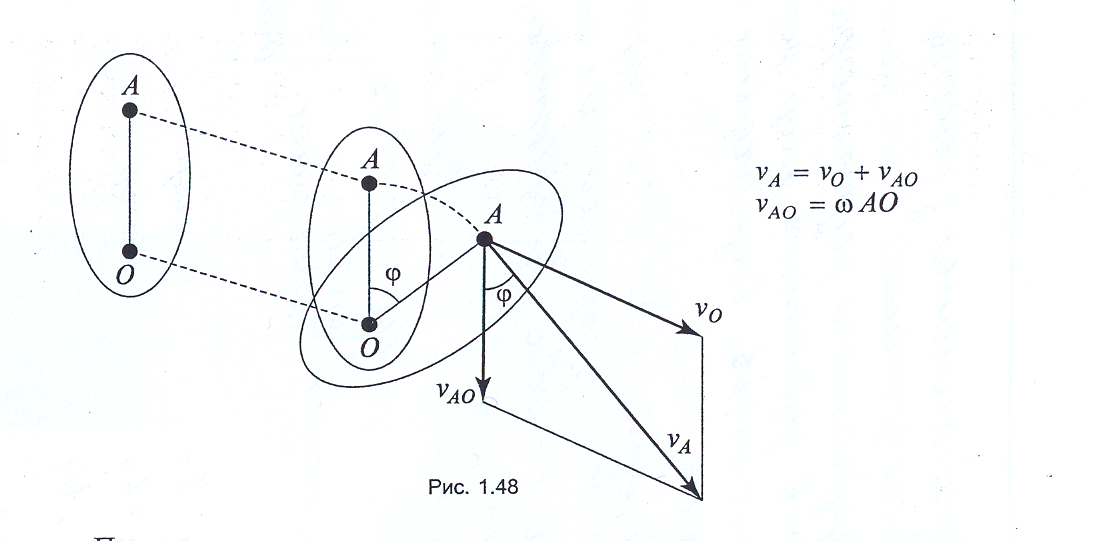
Плоскопаралельний рух тіла може здійснюватись шляхом одночасно виникаючих обертаючих та поступових рухів.
Поступальний рух тіла можна вважати переносним, а обертове – відносним. Тоді вектор абсолютної швидкості будь - якої точки А буде дорівнювати швидкості поступального руху будь - якої іншої точки О плюс швидкість обертаючого руху точки А відносно точки О. (див. 1.48).

Точка, навколо якої відбувається відносний обертальний рух, називається полюсом обертання.
Таким чином, швидкість будь-якої точки тіла при плоско паралельному русі у даний момент часу дорівнює сумі швидкості полюса обертання та обертальної швидкості донної точки відносного полюсу:

В основі другого метода лежить поняття миттєвого центру швидкостей ( МЦШ).
Миттєвий центр швидкостей – це точка плоскої фігури, швидкість якої у даний момент часу дорівнює нулю.
Завжди
можна на фігурі знайти таку точку.
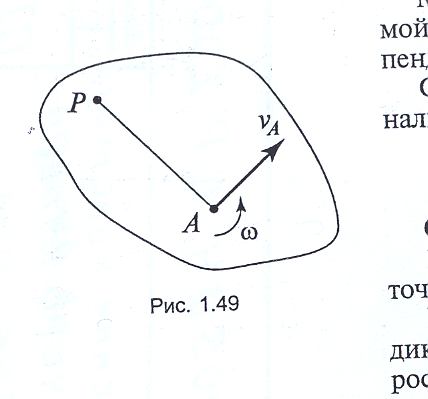
Наприклад, візьмемо швидкість будь-якої
точки А, яку приймаємо за полюс обертання.
Відкладемо відрізок АР. Перпендикулярний
 ,
де
,
де ,
тоді швидкість точки Р дорівнює
,
тоді швидкість точки Р дорівнює ,
де
,
де
(рис.1.49).
Таким чином
 .
.
Миттєвий
центр швидкостей завжди лежить на
прямій, проведеній з б якої точки
фігури перпендикулярно напрямку
швидкостей цієї точки. Швидкість
будь-якої точки фігури прямо пропорційна
її відстані до МЦШ:

Способи знаходження МЦШ:
Відома кутова швидкість та швидкість будь – якої точки.
В
цьому випадку МЦШ точки Р знаходиться
на перпендикулярі відновленому з точки
А до вектора швидкості на відстані
 (рис. 1.49):
(рис. 1.49):

Відомі напрямки швидкостей двох точок
 та
та .
.
В
цьому випадку МЦШ лежить на перетині
перпендикулярів, відновлених з точок
А та В до напрямків їх швидкостей (рис.
1.50).
3)
Відомо, що вектори швидкості двох точок
 та
та паралельні один одному, та направлені
у одну сторону перпендикулярно відрізку
АВ та нерівні за величиною.
паралельні один одному, та направлені
у одну сторону перпендикулярно відрізку
АВ та нерівні за величиною.
У
цьому випадку МЦШ знаходиться у точки
перетину прямої, з'єднуючої початок
векторів
 та
та ,
з прямої, з'єднуючої її кінці (рис. 1.51).
,
з прямої, з'єднуючої її кінці (рис. 1.51).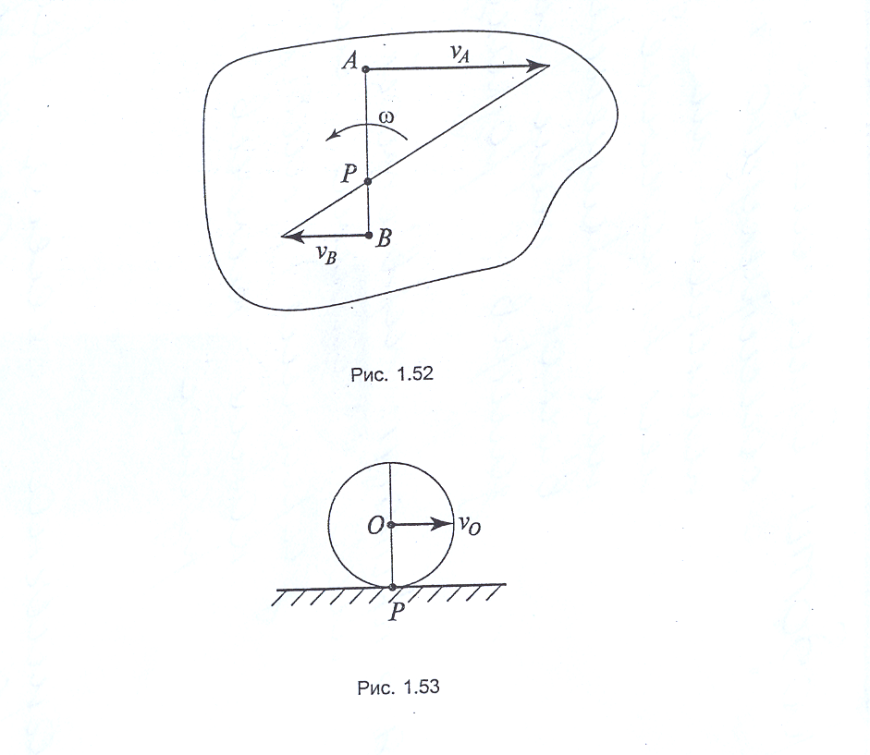
4)
Відомо, що вектор швидкості двох точок
 та
та паралельні один одному, але направлені
у протилежні сторони.
паралельні один одному, але направлені
у протилежні сторони.
У цьому випадку МЦШ знаходиться на перетині прямих, з'єднуючих початок та кінці векторів швидкостей ( рис. 1.52)
5) Відомо, що плоска фігура без ковзання котиться по нерухомій прямій.
У цьому випадку МЦШ знаходиться у точці доторкання фігури з прямою.. (рис. 1.53)