

1.2.2 Пара сил
Парою сил називається система двох сил, які дорівнюють по модулю (значенню), протилежні по напрямку та з паралельними лініями дії (не лежачих на однієй прямій) (рис. 1.17).
Пара
сил робить на тіло обертаючу дію, що
характеризується обертаючим
моментом М.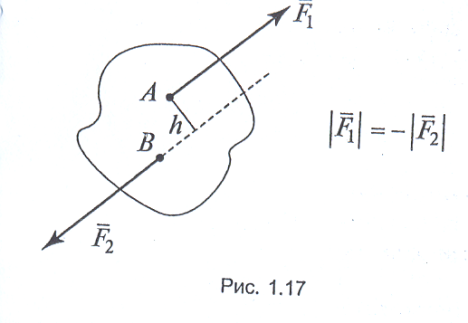
Обертаючий момент пари сил дорівнює добутку однієї із сил пари на плече:

де h – плече пари сил ( перпендикуляр, проведений між лінією дії сил)
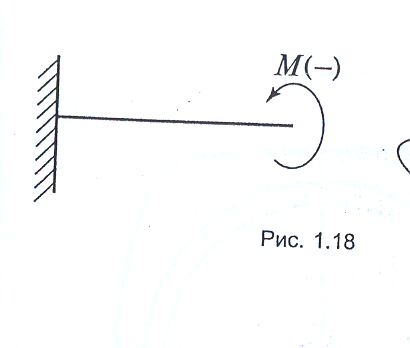
Пари сил на схемах зображуються дугоподібною стрілкою (рис. 1.18).
Пари
сил н
е м о ж н а
замінити однією рівнодійною силою.
Пари сил н
е м а є
проекцій на вісі координат(проекція
пари сил на ось - нуль). Якщо на тіло діє
декілька пар сил, то їх можна замінити
однією рівнодійною парою, момент якої
дорівнює алгебраїчній сумі моментів
доданків пар сил, що діють на тіло (рис.
1.19): 

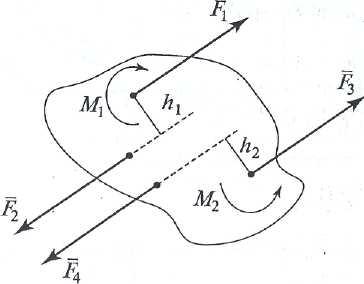

Рис. 1.19
Дві парі сил називаються еквівалентними, якщо вони виконують на тіло о д н а к о в у дію. У еквівалентних пар сил обертаючі моменти повинні бути однаковими як за величиною, так і за напрямком.
Умова рівноваги плоскої системи пар сил: алгебраїчна сума моментів доданків пар сил повинна дорівнювати нулю, тобто

1.2.3 Плоска система довільно розміщених сил
Якщо на тіло, закріплене в деякій точці А, діє сила F , то тіло повернеться щодо цієї точки. Обертальний рух тіла характеризується обертаючим моментом М.
Моментом
сили
 відносно точки А
називається величина, чисельно рівна
добутку сили на плече (рис. 1.16):
відносно точки А
називається величина, чисельно рівна
добутку сили на плече (рис. 1.16):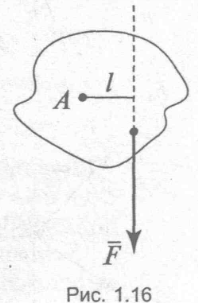
![]()
де / - плече (перпендикуляр, опущений із точки на лінію дії сили).
За одиницю обертаючого моменту приймається 1 Н·м: 1 кH·м = 103 Н·м.
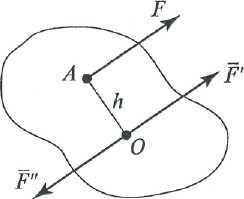
Приведення
сили до даної точки полягає в тому, що
розглянуту силу
 переносять паралельно самій собі в
довільно обрану точкуО.
Для того щоб механічний стан тіла не
змінився, силу
переносять паралельно самій собі в
довільно обрану точкуО.
Для того щоб механічний стан тіла не
змінився, силу урівноважують
силою
урівноважують
силою .
У результаті приведення сили
.
У результаті приведення сили до точкиО
вийшла система сил, що складається з
сили
до точкиО
вийшла система сил, що складається з
сили
 ,
рівній і паралельній даній силі
,
рівній і паралельній даній силі ,
і пари сил (
,
і пари сил ( и
и ),
момент якої дорівнює моменту даної сили
),
момент якої дорівнює моменту даної сили відносно точкиО:
відносно точкиО:
М
= Мо( ).
).
Рис. 1.20
Плоскою системою довільно розташованих сил називається система сил, лінії дії яких лежать в одній площині, але не перетинаються в одній точці (рис. 1.21).
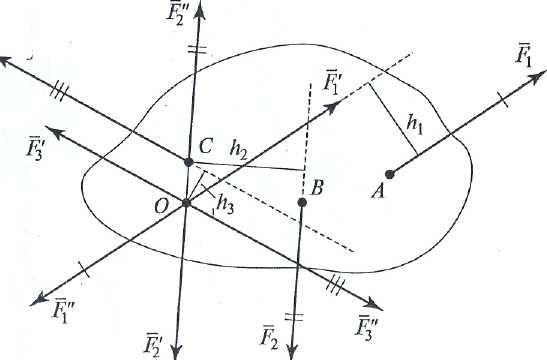
Рис. 1.21
Для того щоб привести дану систему довільно розташованих сил до довільно вибраної точці О (див. рис. 1.21), необхідно:
- перенести по черзі кожну силу в цю точку;
-
зрівноважити сили ( ,
, ,
, )
силами (
)
силами ( ,
, ,
, ).
).
У
результаті приведення сил ( ,
, ,
, )
до точки О одержали нову систему сил,
що складається із плоскої системи
збіжних сил (
)
до точки О одержали нову систему сил,
що складається із плоскої системи
збіжних сил ( ,
, ,
, ),
які дорівнюють й паралельні даним силам,
тобто
),
які дорівнюють й паралельні даним силам,
тобто =
=
 =
=
 =
=
Цю знову отриману систему збіжних сил (1.1) замінюємо рівнодійною силою, яка дорівнює геометричній сумі даних сил і називається головним вектором системи:

У результаті приведення одержали ще одну систему пар сил
 (1.2)
(1.2)
моменти яких дорівнюють моментам даних сил щодо точки О, тобто

Знову отриману систему пар сил (1.2) замінимо однією рівнодійною парою, момент якої дорівнює алгебраїчній сумі моментів доданків пар сил і називається головним моментом системи:

Таким чином, для того щоб тіло під дією плоскої системи довільно розташованих сил перебувало в рівновазі, необхідно, щоб головний вектор і головний момент системи мали дорівнювати нулю:
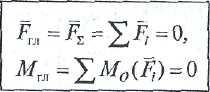
Виразивши головний вектор знову отриманої системи збіжних сил в аналітичній формі, отримуємо два рівняння рівноваги:
 ;
;

Головний момент системи замінимо алгебраїчною сумою моментів даних сил щодо точки приведення:

Таким чином, одержуємо умову рівноваги плоскої системи довільно розташованих сил: алгебраїчна сума проекцій усіх сил на вісі X та Y повинна дорівнювати нулю та алгебраїчна сума моментів усіх сил відносно точки приведення повинна дорівнювати нулю, тобто

- перша (основна) форма рівняння рівноваги
- друга форма
-третя форма