

Кинематический анализ плоских рычажных механизмов (аналитический метод)
Определение положений механизма. ([1], §23, 24, 25; [2], §3.3)
Определение скоростей точек и угловых скоростей звеньев механизма. ([1], §23, 24, 25; [2], §3.3)
Определение ускорений точек и угловых ускорений звеньев механизма. ([1], §23, 24, 25; [2], §3.3)
Кинематический анализ сложных механизмов. ([1], §26; [2], §3.3)
Кинематический анализ механизмов аналитическим методом выполняется с помощью ПК или другой вычислительной техники. Для этого составляется соответствующая программа вычислений, в которую входят формулы для определения положений звеньев и их кинематических характеристик. Если механизм имеет степень подвижности, равную 1, то все кинематические параметры должны определяться исходя из одной величины – обобщенной координаты (для механизмов с ведущим кривошипом, исходя из положения кривошипа).
В основу аналитического решения задачи положен метод замкнутых векторных контуров, предложенный В.А.Зиновьевым.1
Покажем получение основных формул кинематического анализа на примере шарнирного четырехзвенника (Рис.5.1).
Определение положений механизма.
Д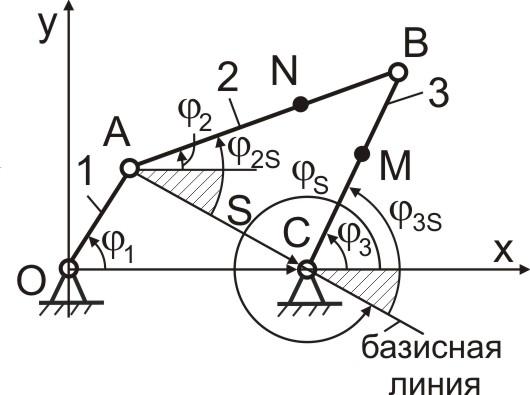 ано:
ано:
ОА, АВ, ВС, ОС(Рис.5.1);
1 – положение начального звена 1;
1 – угловая скорость звена 1;
1–угловое ускорение звена 1.
Определить:
2(1), 3(1)- ?
Рис. 5.1.
Решение
Выберем систему координат хоус началом в точкеО(Рис.5.1).
Рассмотрим векторный контур ОАС, в котором
![]() (5.1)
(5.1)
Принимая
![]() ,
попытаемся определить зависимости
,
попытаемся определить зависимости![]() и
и
![]() .
.
Для этого спроецируем (5.1) на оси хиу:
пр.х
![]() (5.2)
(5.2)
пр.y
![]() (5.3)
(5.3)
При этом
![]() и
и![]() - неизвестные параметры.
- неизвестные параметры.
Выполним преобразования, разделив (5.3) на (5.2):
(5.3) : (5.2) ![]() ,
(5.4)
,
(5.4)
т.е. получили зависимость
![]() .
.
Продолжим преобразования с выражениями (5.3) и (5.2):
![]()
![]() (5.5)
(5.5)
т.е. получили зависимость
![]() .
.
Рассмотрим векторный контур
 и определим
и определим и
и .
.
![]() ,
(5.6)
,
(5.6)![]() , (5.7)
, (5.7)
В (5.6) и (5.7) известно все, кроме 2Sи3S, которые легко определить.
![]() , (5.8)
, (5.8)
т.е. получена зависимость
![]() .
.
![]() ,
(5.9)
,
(5.9)
т.е. получена зависимость
![]() .
.
Определим
 и
и
 .
.
![]() ;
(5.10)
;
(5.10)
![]() ;
(5.11)
;
(5.11)
Отсюда :
![]() ,
т.е.
имеем
,
т.е.
имеем ![]() ;
(5.12)
;
(5.12)
![]() ,
т.е.
,
т.е.
![]() (5.13)
(5.13)
Таким
образом, в результате выполнения пп.
1÷3 определено![]() и
и![]() ,
т.е. положение звеньев, как функция,
положения ведущего звена.
,
т.е. положение звеньев, как функция,
положения ведущего звена.
При необходимости можно определить положение точек, принадлежащих звеньям 2 или 3 (например, координаты
 и
,
и
, -
см. рис.5.1). Покажем эту возможность.
-
см. рис.5.1). Покажем эту возможность.
Найдем проекции положения точек МиNна осихиу:
![]() (5.14)
(5.14)
![]() (5.15)
(5.15)
![]() (5.16)
(5.16)
![]() (5.17)
(5.17)
Поскольку
![]() ,
то полученные выше формулы позволяют
найти
,
то полученные выше формулы позволяют
найти![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() .
.
Задача
определения положений звеньев и точек
звеньев в функции от угла поворота
![]() выполнена.
выполнена.
Определение скоростей точек и угловых скоростей звеньев механизма.
Скорости точек и угловые скорости звеньев можно найти через соответствующие аналоги скоростей:
![]() ,
(5.18)
,
(5.18)
где
![]() - аналог угловой скорости звена 2;
(5.19)
- аналог угловой скорости звена 2;
(5.19)
![]() ,
(5.20)
,
(5.20)
где
![]() - аналог угловой скорости звена 3;
(5.21)
- аналог угловой скорости звена 3;
(5.21)
При этом
![]() и
и![]() не
зависят от1.
не
зависят от1.
Таким
образом, чтобы найти
![]() и
и![]() ,
достаточно найти аналоги
,
достаточно найти аналоги![]() и
и![]() .
.
Определим аналоги угловых скоростей, используя метод замкнутых векторных контуров:
Контур ОАВС(Рис.5.1)
![]() (5.22)
(5.22)
Спроецируем (5.22) на оси хиу:
пр. х![]() (5.23)
(5.23)
пр. у![]() (5.24)
(5.24)
Возьмем
производную по
![]() ,
учитывая, что
,
учитывая, что![]() и
и![]()
![]() (5.25)
(5.25)
![]() (5.26)
(5.26)
Если выполнить (5.25)cos3+ (5.26)sin3 , получим:
![]() (5.27)
(5.27)
Отсюда:
![]() , т.е.
, т.е.
![]() (5.28)
(5.28)
Если выполнить (5.25)cos2+ (5.26)sin2 , аналогично получим:
![]() (5.29)
(5.29)
Откуда:
![]() , т.е.
, т.е.![]() (5.30)
(5.30)
Если известны аналоги (5.28) и (5.30), легко определить 2и3 из (5.18) и (5.20).
Определим скорости точек
Начнем с простого – точка Ви точкаМ.
![]() ; (5.31)
; (5.31)
![]() ; (5.32)
; (5.32)
![]() (5.33)
(5.33)
Скорость точки Nвычислим по проекциям:
![]()
![]()
![]() ;
(5.34)
;
(5.34)
![]()
![]()
![]()
![]()
![]() (5.35)
(5.35)
![]() (5.36)
(5.36)
По аналогии с введенными ранее понятиями аналогов угловых скоростей можно ввести понятия аналогов скоростей точекА, В, М, N.
![]() ;
(5.37)
;
(5.37)
![]() ;
(5.38)
;
(5.38)
![]() ;
(5.39)
;
(5.39)
![]() (5.40)
(5.40)
Определение ускорений точек и угловых ускорений звеньев механизма.
Для определения ускорений используют аналоги ускорений:
![]() ;
;
![]() ,
(5.41)
,
(5.41)
где
![]() - аналог углового ускорения звена 2.
(5.42)
- аналог углового ускорения звена 2.
(5.42)
Аналогично:
![]() ,
(5.43)
,
(5.43)
где
![]() - аналог углового ускорения звена 3.
- аналог углового ускорения звена 3.
Таким
образом, для определения2
и3необходимо
найти аналоги![]()
Определим аналоги угловых ускорений (Рис. 5.1).
Продифференцируем
уравнения (5.25) и (5.26) по 1,
учитывая, что2(1),3(1),![]() .
.
![]()
=![]() ;
(5.44)
;
(5.44)
![]()
![]() ;
(5.45)
;
(5.45)
Если выполнить ![]() ,
получим:
,
получим:
![]()
![]() ;
(5.46)
;
(5.46)
![]() (5.47)
(5.47)
Если выполнить ![]() ,
получим:
,
получим:
![]()
![]() (5.48)
(5.48)
![]() (5.49)
(5.49)
Зная аналоги скоростей и аналоги ускорений, по формулам (5.41) и (5.43) находят 2 и3.
Ускорения точек, принадлежащих звеньям 1 и 3 (в нашем случае точки А, В, М) находят по формуле:
![]() , (5.50)
, (5.50)
где
![]() - ускорение
- ускорение![]() -
той точки;
-
той точки;
![]() - расстояние
- расстояние![]() -
той точки от оси вращения;
-
той точки от оси вращения;
![]() и
и![]() - угловое ускорение и угловая скорость
- угловое ускорение и угловая скорость![]() -го
звена, которому принадлежит
-го
звена, которому принадлежит![]() -я
точка.
-я
точка.
В качестве примера,
определим ускорение точки В:
![]()
Ускорение
точки N, принадлежащей
звену 2, находят по проекциям, дифференцируя
еще раз выражения![]() и
и![]() .
.
Кинематический анализ сложного механизма.
Д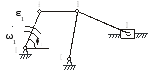 ано:
ОА – ведущее звено;
ано:
ОА – ведущее звено;
ОА, АВ, ВС, ОС, BD(Рис.5.2);
1 – положение ведущего звена;
1 – угловая скорость ведущего
звена;
1–угловое ускорение ведущего
звена.
Определить: i , Vk , i , ak , i .
Рис. 5.2.
Кинематический анализ сложного механизма выполняется в последовательности, соответствующей написанию формулы строения механизма. В данном случае из формулы строения I(0,1) II(2,3) II(4,5) следует, что вначале необходимо определить кинематические характеристики ведущего звена 1. Затем рассматривают векторный контур ОАВС, определяя кинематические характеристики звеньев и точек двухповодковой группы II(2,3). После этого из векторного контура СВD определяют кинематические параметры следующей двухповодковой группы II(4,5).
В заключении следует подчеркнуть, что решение задачи кинематического анализа на ПК, хоть и обладает потенциально более высокими возможностями и точностью, все же само по себе не гарантирует правильного решения. В этой связи составленная компьютерная программа перед ее серьезным использованием должна быть опробована и отлажена на ряде тестовых задач, ответы на которые уже имеются.
Вопросы для самоконтроля
В чем Вы видите преимущества аналитического метода кинематического расчета механизма в сравнении с графическим?
Объясните смысл понятий «аналог угловой скорости», «аналог углового ускорения».
Объясните смысл метода «замкнутых векторных контуров» при аналитическом решении задачи кинематического анализа.
В какой последовательности выполняется кинематический анализ сложного рычажного механизма?
Лекция 6