

Лекция 1
«Теория механизмов и машин» (тмм) - как наука.
Основные понятия.
Кинематические пары и их классификация.
ТММ как наука. Место ТММ в структуре дисциплин для подготовки инженеров-механиков. Структура ТММ. Задачи ТММ. ([1], §1; [2], Глава 1)
Основные понятия: машина, механизм, звено, кинематическая пара, кинематическая цепь. ([1], §2; [2], §2.1; [3], §1)
Классификация кинематических пар по количеству условий связи. Низшие и высшие кинематические пары. ([1], §3-5; [2], §2.2; [3], §1)
ТММ как наука. Место ТММ в структуре дисциплин для подготовки инженеров-механиков. Структура ТММ. Задачи ТММ.
ТММ – наука, изучающая общие закономерности строения и механического движения механизмов и машин, а также возникающие при этом взаимодействия между их элементами.
ТММ – общеинженерная наука, которая, наряду с теоретической механикой, сопротивлением материалов, деталями машин и др., является теоретической базой для дисциплин, занимающихся расчетом и проектированием механизмов и машин специального назначения (конвейеры, станки, подъемно-транспортные механизмы, металлургические машины и оборудование: рольганги, прокатные клети, ножницы и др.).
Структурно ТММ состоит из 2-х более узких дисциплин: «теория механизмов» и «теория машин».
В рамках теории механизмов изучают основные принципы строения механизмов, закономерности кинематики и динамики их движения, факторы, влияющие на работу механизмов (трение, колебания звеньев, неуравновешенность звеньев и др.).
В рамках теории машин изучают те же закономерности строения и движения, но применительно к машине как совокупности работающих совместно механизмов. Здесь же рассматривают основы автоматического управления и регулирования машин-автоматов, вопросы виброактивности и виброзащиты машин, основы проектирования роботов и манипуляторов. Круг этих вопросов может расширяться с развитием техники и технологий.
Естественно, что основные принципы решения задач механики механизмов и механики машин могут быть общими. В этой связи, многие вопросы теории механизмов и теории машин целесообразно излагать параллельно, объединив их одним названием - «теория механизмов и машин».
По постановке задач и способам их решения 1 ТММ имеет сходство с теоретической механикой.
Действительно, методы решения задач ТММ (аналитические, графоаналитические и графические) часто заимствованы или базируются на методах теоретической механики. Эти методы вначале разрабатывались для абстрактных моделей теоретической механики, и, только потом, нашли применение в расчетной практике ТММ. В определенном смысле, ТММ можно рассматривать как практический курс теоретической механики, созданный для изучения специальных объектов - механизмов и машин. В то же время, по охвату рассматриваемых проблем, ТММ является более широкой и многогранной наукой, область знаний которой распространяется далеко за пределы вопросов кинематики и динамики машин. Современное состояние ТММ таково, что на ее основе уже созданы и развиваются дочерние направления, получившие статус самостоятельных наук.
Все задачи ТММ можно разделить на 2 основные группы (Рис.1.1):
Задачи анализа механизмов и машин (структурный, кинематический и динамический).
Задачи синтеза механизмов и машин (структурный, кинематический и динамический).
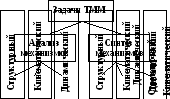
Рис.1.1
Смысл приведенных типов и видов задач поясним на примере задач анализа и синтеза условного механизма.
Анализ– это процесс исследования определенных характеристик готового механизма. В процессе анализа определяют:
степень подвижности, структуру и класс механизма (структурный анализ);
кинематические характеристики механизма: положения звеньев, траектории движения точек, их скорости и ускорения, угловые скорости и угловые ускорения звеньев (кинематический анализ);
динамические характеристики механизма: скорости и ускорения (динамический анализ), силы и моменты сил (силовой анализ).
Синтез– это процесс создания механизма, удовлетворяющего заранее заданным требованиям (структурным, кинематическим и динамическим). В процессе синтеза определяют:
структуру механизма (структурный синтез) для удовлетворения заданным критериям (габаритные размеры, мощность привода, КПД и т.д.);
расположение опорных точек и поверхностей (неподвижные шарниры, направляющие), требуемые формы и размеры звеньев, профиль сопрягаемых поверхностей, числа зубьев зубчатых передач (кинематический синтез);
инерционные характеристики звеньев механизма: массы звеньев, их моменты инерции (динамический синтез).
Примечание.Для лучшего понимания смысла задач анализа и синтеза уместно привести аналогию из «Сопротивления материалов». Так, условия прочности, применяемые для всех видов деформаций, могут быть использованы для проверочного расчета конструкции (аналог задачи анализа в ТММ) и проектировочного расчета (аналог задачи синтеза).
Основные понятия: машина, механизм, звено, кинематическая пара, кинематическая цепь.
Структура основных понятий ТММ приведена на схеме (Рис. 1.2).
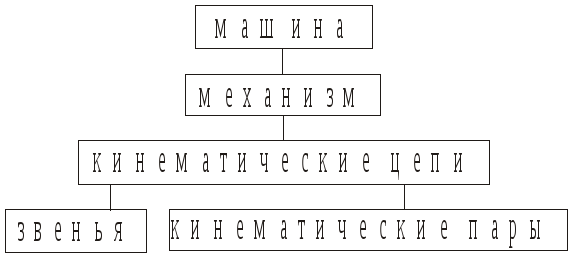
Рис. 1.2
Слова механизмимашиначасто употребляют как синонимы, обозначая ими технические устройства, отдельные части которых выполняют механические движения. Действительно, механические движения частей являются характерной особенностью этих устройств. И все же, между понятиями «машина» и «механизм» имеется разница.
Машина– это созданное человеком устройство, выполняющее механические движения для преобразования энергии, материалов1и информации с целью замены или облегчения физического и умственного труда человека [3]. Таким образом, главной отличительной особенностью машины является то, что полезный для человека результат всегда достигается за счет механического движения отдельных ее частей. Из определения также вытекает возможная классификация машин по назначению, т.е. условное разделение их на энергетические, технологические, транспортные и информационные.
Энергетические машиныпредназначены для преобразования любого вида энергии в механическую работу (или наоборот, если машина работает в генераторном режиме). Этомашины-двигатели, к числу которых можно отнести электродвигатели, двигатели внутреннего сгорания, паровые машины, электрогенераторы и т.д.
Все остальные машины не преобразовывают, а потребляют подводимую к ним энергию, расходуя ее на выполнение технологических, транспортных задач или обработку информации. Все эти машины можно назвать рабочими машинами. Ктехнологическим машинамотносят прокатные станы, металлообрабатывающие, ткацкие станки и т.п. Подтранспортными машинамипонимают краны, транспортеры, колесные и другие транспортные средства. Термининформационные машиныприменяется для обозначения механических устройств приема и преобразования информации (например, устройства автоматического счета, взвешивания, контроля параметров). Сюда же можно отнести ушедшие в прошлое счетные и вычислительные устройства, работающие на механическом принципе (арифмометры, интеграторы и т. д.). Электронные устройства для математических вычислений и обработки информации (компьютеры и т.п.), у которых выполнение основных операций не связано с механическим движением их частей, строго говоря, машинами не являются.
Развитое машинное устройство, состоящее из машины-двигателя и рабочей машины (в составе одного или нескольких механизмов, например: передаточных, исполнительных, вспомогательных и др.), называют машинным агрегатом.
Примером машинного агрегата может служить схема, предлагаемая студентам для курсового проектирования по ТММ (Рис.1.3).
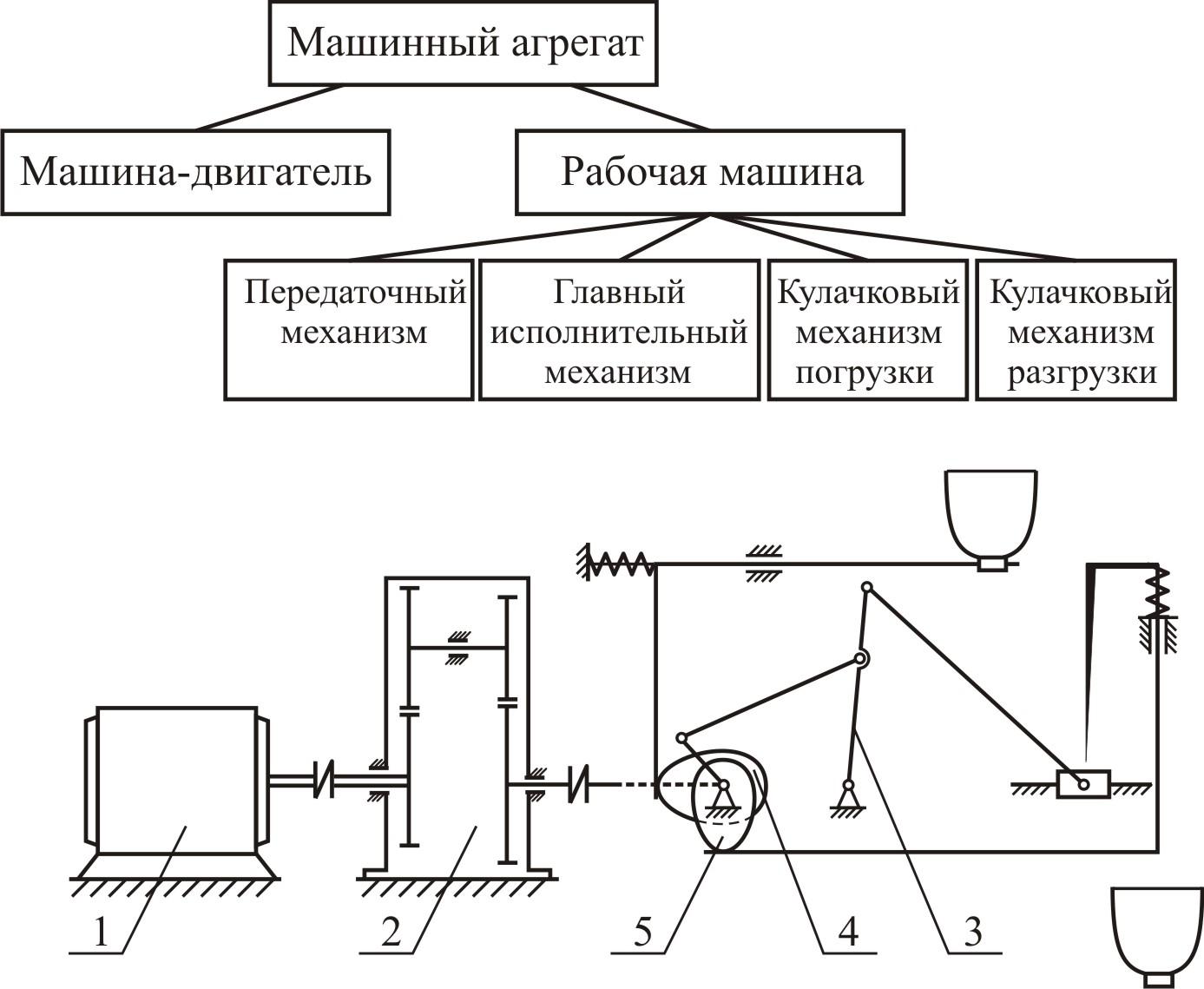
Рис. 1.3.
1 – машина-двигатель; [2, 3, 4, 5] – рабочая машина
( 2 – передаточный механизм; 3 – главный исполнительный механизм;
4 – кулачковый механизм погрузки; 5 – кулачковый механизм разгрузки)
Механизм- это система тел, предназначенная для преобразования движения одного или нескольких твердых тел1в требуемое движение других твердых тел [3, 4]. Таким образом, основным признаком механизма является факт преобразования механического движения одного тела (входного) в механическое движение другого тела (выходного). Данное преобразование, как правило, предполагает существование кинематической связи между этими движениями.
Приведем примеры некоторых механизмов:
- редуктор (передаточный механизм)– обеспечивает преобразование вращательного движения входного тела (вала 1) во вращательное движение выходного тела (вала 2) с изменением угловой скорости;
- кривошипно-ползунный механизм(Рис.1.3) – обеспечивает преобразование вращательного движения входного тела 1 (кривошипа) в поступательное движение выходного тела 3 (ползуна).
Теперь, после выяснения сути понятий «машина» и «механизм», можно окончательно ответить на вопрос – могут ли эти понятия быть тождественными?
В частном случае, если отдельно взятый механизм рассматривать как устройство, достаточное для преобразования материала (например, ручной пресс для брикетирования металлической стружки), то этот механизм, одновременно, может быть назван машиной.
В то же самое время, «машина» - это более широкое понятие. В состав машины могут входить один или несколько различных механизмов, а также другие устройства, не имеющие к механизмам никакого отношения (электрические системы пуска, регулирования и т.д.). Наконец, машина может вовсе не содержать механизмов, если, например, исполнительный орган машины соединен с электродвигателем непосредственно, без промежуточных звеньев (т.е напрямую).
Звено. Из данного выше определения механизма следует, что любой механизм – это система взаимодействующих между собой тел (твердых, жидких, газообразных). Твердое тело, входящее в состав механизма называют звеном механизма или просто звеном [3, 4]. Жидкости и газы, входящие в состав гидравлических и пневматических механизмов звеньями этих механизмов не являются. Звенья механизма могут состоять из деталей. Следует различать понятия «звено» и «деталь», несмотря на то, что этими словами часто называют одну и ту же составную часть механизма. В этой связи понятию «звено» уместно дать другое определение.
Звено – одна или группа деталей, жестко соединенных между собой и выполняющих совместное движение как одно целое (т.е. относительное движение деталей отсутствует).
П римером
звена может служить шатун двигателя
внутреннего сгорания (Рис.1.4), состоящий
из жестко соединенных между собой
деталей: корпуса, шатунной крышки,
шатунных подшипников (втулок 1 и 2) и
крепежных деталей.
римером
звена может служить шатун двигателя
внутреннего сгорания (Рис.1.4), состоящий
из жестко соединенных между собой
деталей: корпуса, шатунной крышки,
шатунных подшипников (втулок 1 и 2) и
крепежных деталей.
Рис.1.4
З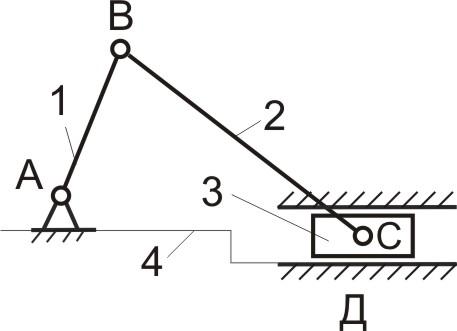 венья,
входящие в состав механизма, подразделяются
на подвижные и неподвижные 1.
Неподвижное звено в ТММ называют
«стойкой». На рис.1.5 представлен
четырехзвенный механизм, в котором: 1,
2, 3 – подвижные звенья; 4 – неподвижное
звено (стойка).2
венья,
входящие в состав механизма, подразделяются
на подвижные и неподвижные 1.
Неподвижное звено в ТММ называют
«стойкой». На рис.1.5 представлен
четырехзвенный механизм, в котором: 1,
2, 3 – подвижные звенья; 4 – неподвижное
звено (стойка).2
Рис.1.5
Входное, выходное и промежуточные звенья. Среди подвижных звеньев механизма можно выделить входное звено, выходное звено и промежуточные звенья. Входное звено – это звено, которому сообщается движение, преобразуемое механизмом в требуемые движения других звеньев [3, 4]. Выходное звено – это звено, совершающее движение, для выполнения которого предназначен механизм [3, 4]. Звенья, находящиеся структурно между входным и выходным звеном называют промежуточными. В большинстве случаев механизм имеет одно входное и одно выходное звено. В то же время, встречаются механизмы с одним входным и несколькими выходными звеньями (например, дифференциальный механизм привода колес автомобиля) либо наоборот. В общем случае число входных звеньев, как и число выходных звеньев, может быть различным.3
Кинематические пары. Звенья в механизме соединяются между собой подвижно. Подвижное соединение двух соприкасающихся звеньев называется кинематической парой [1, 2]. Похожее определение приводится в [3, 4]: «Кинематическая пара – соединение двух соприкасающихся звеньев, допускающее их относительное движение». Допускается также применение сокращенного термина «пара» [4].
В приведенном на рис.1.5 механизме кинематические пары обозначены буквами А, В, С, Д. Каждая из пар является подвижным соединением двух звеньев: А → (4,1); В → (1,2); С → (2,3); Д → (3,4).
В общем случае звено может образовывать несколько подвижных соединений с другими звеньями.
Внимание !!!Соединение в одном шарнире более чем 2-х звеньев не является одной кинематической парой.
На рис.1.6,а изображен шарнирный шестизвенник, в котором выделен шарнир, обеспечивающий подвижное соединение звеньев 2, 3 и 4. При структурном анализе механизма считают, что в этом шарнире сосредоточено 2 подвижных соединения, а, значит, 2 кинематические пары. К этому выводу можно прийти логически, если мысленно заменить указанный шарнир двумя шарнирами, принадлежащими звену 3 и расположенными в непосредственной близости от заменяемого (Рис.1.6, б). Суть первого шарнира – кинематическая пара для звеньев 2 и 3, суть второго шарнира – кинематическая пара для звеньев 3 и 4.
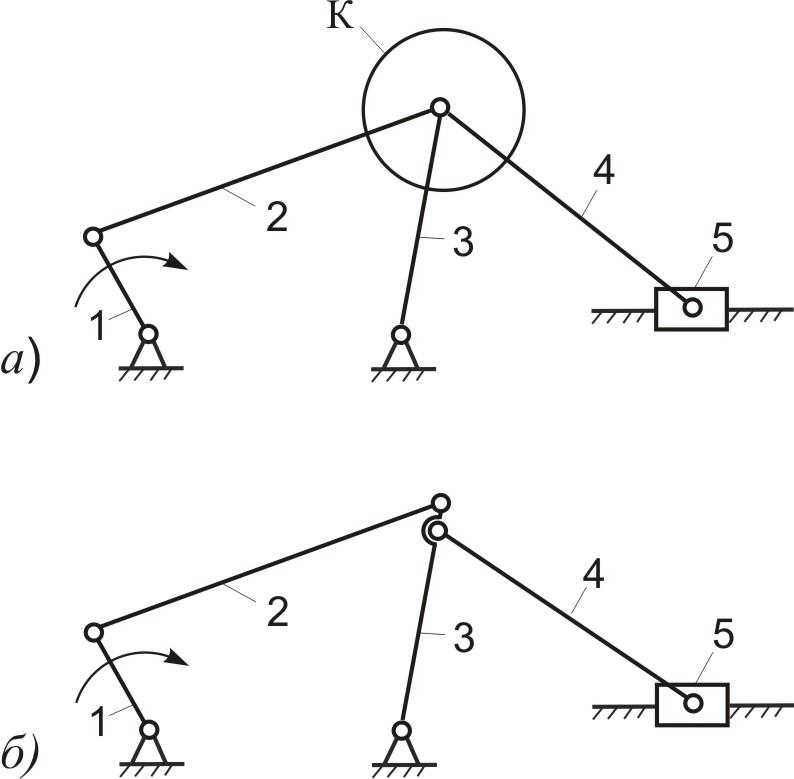
Рис.1.6
В общем случае число вращательных кинематических пар при соединении nзвеньев в одном шарнире можно определить по формуле:
Р5 = n - 1
где n– количество звеньев, входящих в шарнир.
Кинематическая цепь – система звеньев, образующих между собой кинематические пары [3]. Кинематические цепи (Рис.1.7) подразделяются на плоские и пространственные, простые и сложные, замкнутые и незамкнутые.
Плоская кинематическая цепь – все звенья двигаются в плоскости, параллельной некоторой одной плоскости.
Пространственная кинематическая цепь – звенья двигаются в различных плоскостях.
Простая кинематическая цепь – каждое звено образует с другими звеньями не более 2-х кинематических пар (в литературе можно встретить другую терминологию – каждое звено «входит» не более чем в 2 пары [1, 2, 3] ).
Сложная кинематическая цепь – хотя бы одно звено образует с другими звеньями более 2-х кинематических пар (входит более чем в 2 кинематические пары).
Замкнутая кинематическая цепь - звенья образуют один или несколько замкнутых контуров.
Незамкнутая кинематическая цепь - звенья не образуют замкнутых контуров.

Рис.1.7
Классификация кинематических пар по количеству условий связи. Низшие и высшие кинематические пары.
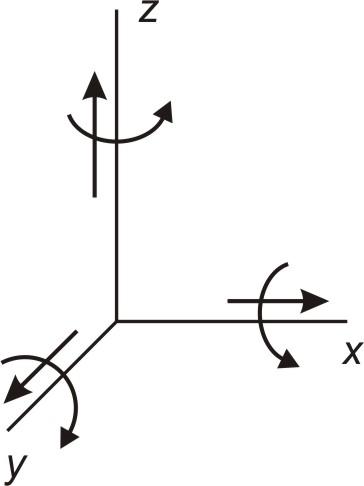
Абсолютно свободное тело в трехмерном пространстве имеет 6 степеней свободы (степеней подвижности). Это означает, что ему может быть сообщено любое из 6-ти независимых перемещений (три линейных и три угловых). Для изображенной на рис.1.8 системы координат возможные независимые перемещения показаны стрелками.
Рис.1.8
В механизме звенья входят с другими звеньями в кинематические пары. Условие постоянства контакта звеньев в паре делает эти звенья не свободными. При этом, каждая кинематическая пара, в зависимости от своих свойств, накладывает ограничения на те или иные возможные перемещения входящего в кинематическую пару звена (т.е. делает их невозможными). Кинематическая пара не может ограничить все 6 перемещений, т.к. в этом случае соединение звеньев становится неподвижным. Кинематическая пара не может ограничить 0 (ноль) перемещений, т.к. тогда звенья теряют связь между собой и становятся абсолютно свободными телами. Таким образом, количество наложенных парой ограничений может колебаться в пределах от 1 до 5. Эти ограничения в механике называют «условиями связи». Все многообразие видов кинематических пар можно классифицировать по количеству условий связи и отдельным комбинациям их. Эта классификация приведена ниже (Таблица 1.1).
Количество условий связи, в свою очередь, определяет класс и степень подвижности кинематической пары.
Класс кинематической пары (ККП) показывает количество ограничений, которые накладываются парой на взаимное перемещение двух звеньев. В структурных формулах класс пары обозначают нижним индексом. Например, запись р5 обозначает число кинематических пар 5-го класса.
Степень подвижности кинематической пары (СПКП), наоборот, показывает количество разрешенных парой относительных движений двух звеньев.
Из сказанного выше очевидна связь:
(СПКП) = 6 – (ККП) (1.1)
Учитывая (1.1) кинематические пары:
- 5-го класса еще называют 1-но ходовыми (1-но подвижными);
- 4-го класса - // - 2-х ходовыми (2-х подвижными);
- 3-го класса - // - 3-х ходовыми и т.д.
Любая кинематическая пара образуется подвижным контактом точек, принадлежащих двум звеньям. Совокупность поверхностей, линий и отдельных точек звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару, называется элементом кинематической пары.
Используя это понятие, можно классифицировать кинематические пары на низшие и высшие.
Низшие кинематические пары образованы элементами пар, контактирующими по поверхности.
Высшие кинематические пары образованы элементами пар, контактирующими по линии или в точке.1
После определения всех необходимых понятий приведем классификацию кинематических пар по классам и отдельным видам с указанием принадлежности пары к низшим или высшим.
Таблица 1.1
Классификация кинематических пар
|
Класс кинематической пары |
Число степеней свободы |
Название пары |
Рисунок |
Условн. обозначение |
|
1 |
2 |
3 |
4 |
5 |
|
1 |
6 – 1 = 5
5-ти подвижная |
шар–плоскость,
высшая |
|
|
|
2 |
6 – 2 = 4
4-х подвижная |
цилиндр-плоскость,
высшая |
|
|
|
3 |
6 - 3 = 3
3-х подвижная |
сферический шарнир,
низшая |
|
|
|
3 |
6 - 3 = 3
3-х подвижная |
плоская,
низшая
|
|
|
|
4 |
6 - 4 = 2
2-х подвижная |
пространств. цилиндрич. шарнир,
низшая |
|
|
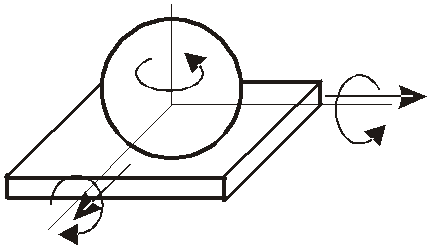

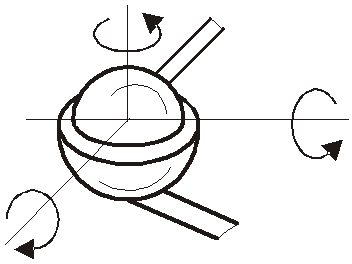
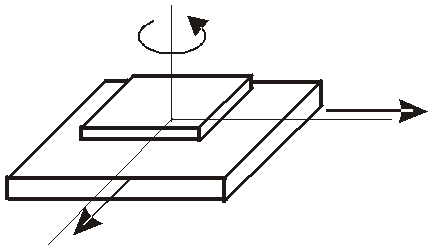
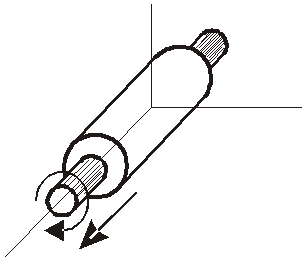
Таблица 1.1 (продолжение)
|
1 |
2 |
3 |
4 |
5 |
|
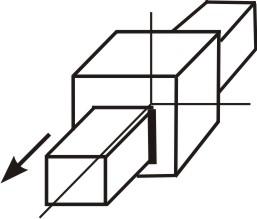
5 |
6 - 5 = 1
1-но подвижная |
поступательная,
низшая |
|
|
|
5 |
6 - 5 = 1
1-но подвижная |
вращательная или плоский цилиндрический шарнир,
низшая |
|
|
|
5 |
6 - 5 = 1
1-но подвижная |
винтовая |
|
|
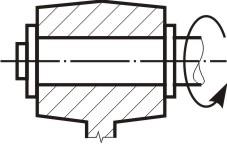
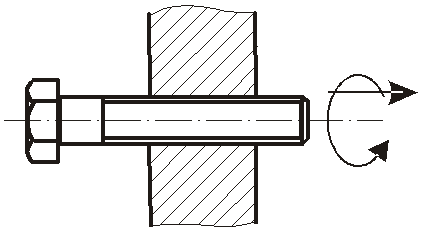
При сопоставлении степени подвижности винтовой кинематической пары (1-но подвижная) с числом разрешаемых парой движений (на рисунке показано два – линейное перемещение винта в направлении оси и поворот винта вокруг оси) может показаться, что допущена ошибка. Действительно, при 2-х относительных движениях звеньев степень подвижности пары должна равняться 2-м???
На самом деле, никакой ошибки и противоречия здесь нет. Дело в том, что между указанными 2-мя перемещениями существует однозначная кинематическая связь. В силу этой кинематической связи, задав угол поворота винта, получают строго определенное перемещение по оси, и наоборот. Следовательно, независимое перемещение только одно, а степень подвижности винтовой кинематической пары, определяемая числом независимых относительных перемещений, равна 1.
Вопросы для самоконтроля
Объясните смысл понятий «машина», «механизм», «кинематическая цепь», «звено», «кинематическая пара».
В чем суть деления кинематических пар на классы? Сколько этих классов?
Как связаны класс кинематической пары и ее степень подвижности?
Приведите примеры одноходовых кинематических пар.
Лекция 2