

Лекція № 11. Спеціальні двигуни постійного струму. Вентильні двигуни
11.1. Спеціальні двигуни постійного струму
У двигунах постійного струму, що застосовуються в ПР, використані практично всі типи конструкцій магнітних систем: радіальні, скобоподібні, кільцеві, зовнішні з якорем класичної конструкції, набраного з шихтованої електротехнічної сталі, внутрішні, розташовані всередині пустого якоря.
Поряд з класичною конструкцією якоря добре вивченою в курсі “Електричні машини”, широко застосовується гладкий і малоінерційний якорі. Гладкий якір з відкритим пазом і мінімальним числом витків у секції має зменшену індуктивність секції і обмотки якоря в цілому. У зв’язку з цим при гладкому якорі поліпшуються умови комутації машин і, отже, перевантажувальна здатність. Мала інерційність якоря досягається його порожнім або дисковим виконанням.
Двигуни з порожнім ротором (ДПУ135) – мають конструкцію, що спрощено зображена на рис.1.
Р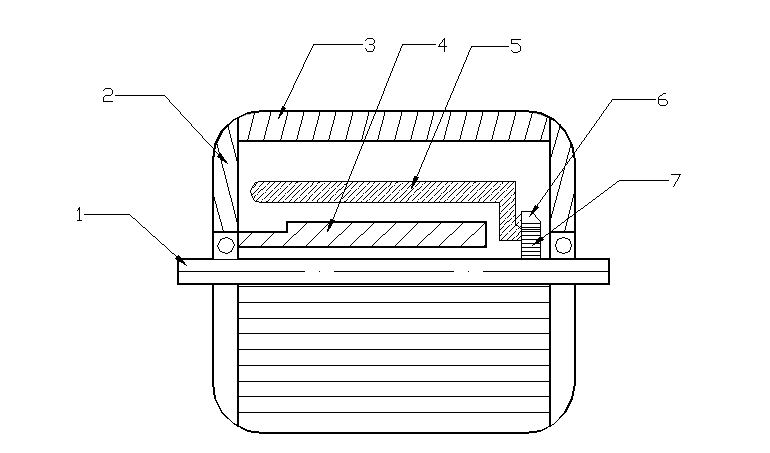 ис.11.1.
Конструкція двигуна постійного струму
з порожнім ротором.
ис.11.1.
Конструкція двигуна постійного струму
з порожнім ротором.
На підшипниковому щиті 2 укріплено постійний магніт 4. Магнітний потік замикається по корпусу 3 і пронизує витки обмотки якоря, яка виконана двошаровою і утворює порожній ротор 5 при заливці її спеціальним компаундом і наступної формовки. Ротор насаджений на вал 1. Кінці обмоток виведені на колектор 7, до якого притиснуті щітки 6.
Двигуни мають хорошу комутацію завдяки малій індуктивності секцій, електромагнітну і електромеханічну постійну часу у 2–2,5 рази менше і більш високий ККД, ніж звичайні двигуни тієї ж потужності.
Дискові двигуни мають штампований дисковий якір із ізоляційного матеріалу, по обидві боки якого методом печатного монтажу нанесені тонкі провідники, як показано на рис.2. Радіальні ділянки 1 витків утворюють активні провідники, зігнуті ділянки 2 – лобову частину обмотки. Перехід з одного боку на інший здійснюється через металізовані отвори або клепки 3.

Рис.11.2. Якір з печатною обмоткою (восьмиполюсна хвильова обмотка).
Провідники печатного монтажу виконані без ізоляції і, отже, допускають суттєво більші щільності струмів (30–40 А/мм2 і до 100–150 А/мм2 в імпульсі), ніж обмотки звичайного якоря, що знаходиться в пазах, завдяки кращим умовам охолодження. Звичайно у таких машин щітки ковзають безпосередньо по провідникам обмотки, тобто колектора не треба. Момент інерції печатного якоря у 2–4 рази менше, ніж у двигуна тієї ж потужності з якорем звичайного виконання. На рис.3. зображена конструкція дискового двигуна ДПУ, де позначені: 1 – вал, 2 – щітки, 3 – щіткотримач, 4 – полюс, 5 – магнітопровід, 6 – корпус, 7 – роз’єм, 8 – якір, 9 – щит підшипниковий, 10 – тахогенератор.

Рис.11.3. Конструкція двигуна ДПУ (дискового).
Постійні магніти 4 закріплені в кільцевому магнітопроводі 5, що виготовлений з магнітом’якого матеріалу. Магнітна система вбудована в корпус 6 і підшипниковий щит 9. У корпусі встановлено щітковий вузол 2 і 3. Щітки 2 безпосередньо ковзають по провідникам обмотки печатного якоря 8.
Двигун з печатною обмоткою на дисковому якорі у порівнянні з двигунами звичайної конструкції має наступні переваги:
незначну електромагнітну постійну часу,
безіскрову комутацію,
понижений момент інерції,
покращені динамічні якості,
лінійність механічних характеристик в тому числі при великих навантаженнях,
невелику вартість,
низький рівень шумів і вібрацій.
Недоліки:
мала жорсткість механічної характеристики (за рахунок великої щільності струму обмотки якоря),
підвищені втрати в міді і на вихрові струми у печатній обмотці, що знижують ККД,
підвищений розмір немагнітного зазору, що також приводить до зниження ККД,
мала довговічність за рахунок зносу печатного монтажу під щіткою.
Електромагнітна постійна часу у розглянутого нами типу двигунів суттєво менше електромеханічної, і передавальна функція двигуна може бути записана спрощено:
![]() ,
,
де ω – кутова швидкість (1/с), Uя – напруга якоря, с –постійна машини (Вс), Тм – електромеханічна постійна (с).