

Тема 7. Властивості реальних газів, рідин, твердих тіл.
Рівняння Ван-дер-Ваальса та його аналіз. Експериментальні ізотерми реального газу. Критичний стан. Критичні параметри. Фізичні основи та сучасні способи зрідження газів і одержання низьких температур. Насичена та не насичена водяна пара. Вологість повітря. Будова, властивості і класифікація рідин. Сучасні уявлення про структуру рідин. Ближній порядок. Поверхневий натяг. Явища змочування та незмочування. Капілярні явища. Рідкі кристали. Будов твердих тіл. Кристалічні та аморфні тіла. Теплове розширення твердих тіл. Теплоємність твердих тіл.
Тема 8. Фазові переходи.
Фаза, агрегатні стани, фазові переходи. Фазові переходи першого та другого роду. Випаровування і конденсація. Кипіння. Плавлення і кристалізація. Сублімація. Потрійна точка. Фазова діаграма. Рівняння теплового балансу.
Тема 1
Кінематика матеріальної точки при прямолінійному
та криволінійному рухах
Теоретичні відомості
1. Основні поняття кінематики. Кінематика поступального руху матеріальної точки.
Кінематика – це розділ механіки, у якому вивчаються засоби опису рухів незалежно від причин, що обумовлюють ці рухи.
М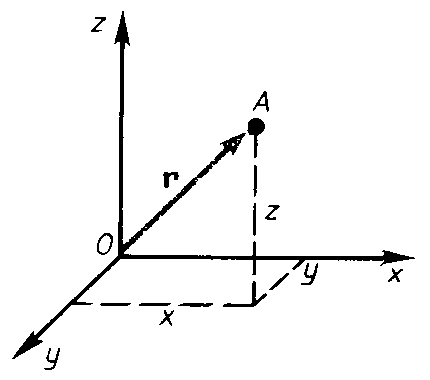 еханічним
рухом
називається зміна з часом положення
тіла в просторі відносно інших тіл.
еханічним
рухом
називається зміна з часом положення
тіла в просторі відносно інших тіл.
Для опису положення тіла необхідно вибрати систему відліку, що містить у собі тіло відліку, систему координат і прилад для відліку часу.
Н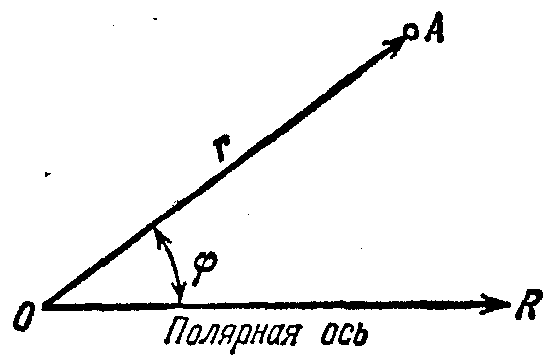 айбільш
розповсюджені декартова і полярна
системи координат. У декартовій системі
положення точки визначається числами,
відзначеними на координатних вісях. У
полярній системі координат положення
точки визначаться єдиним вектором і
кутом, що він створює з координатними
вісями.
айбільш
розповсюджені декартова і полярна
системи координат. У декартовій системі
положення точки визначається числами,
відзначеними на координатних вісях. У
полярній системі координат положення
точки визначаться єдиним вектором і
кутом, що він створює з координатними
вісями.
Механічний рух буває поступальним, обертальним і коливальним. Поступальним називається рух, при якому всі точки тіла рухаються однаково. При обертальному русі точки тіла роблять поворот навколо вісі обертання. При коливальному русі положення точки періодично повторюється.
Матеріальною точкою називається тіло, розмірами і формами якого в даних умовах можна знехтувати.
Лінія, уздовж якого рухається тіло, називається траєкторією.
Шлях – довжина траєкторії.
Переміщення – вектор, що з'єднує початкове положення тіла з його наступним положенням.
Існує три способи опису руху точки у просторі: векторний, координатний і природничий.
В
 екторний
спосіб.
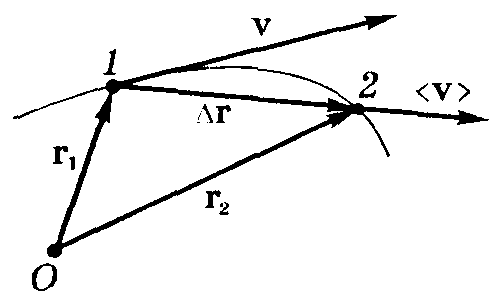
Положення точки задають радіусом-вектором,
значення якого при русі точки змінюється
як за модулем, так і за напрямком. Нехай
точка перемістилася з положення 1 у
положення 2.
екторний
спосіб.
Положення точки задають радіусом-вектором,
значення якого при русі точки змінюється
як за модулем, так і за напрямком. Нехай
точка перемістилася з положення 1 у
положення 2.
 – радіус-вектор, що визначає початкове
положення точки,
– радіус-вектор, що визначає початкове
положення точки,
 -
кінцеве. Переміщення:
-
кінцеве. Переміщення:
 .
.
Середньою швидкістю називається фізична величина, яка дорівнює відношенню збільшення радіуса-вектора до проміжку часу, протягом якого це збільшення здійснилося.
![]() ,
,
![]() .
.
Миттєва швидкість – це границя, до якої наближається середня швидкість, якщо проміжок часу наближається до нуля.
![]() .
.
Миттєва швидкість визначається як похідна від радіуса-вектора за часом і спрямована по дотичній до траєкторії в даній точці.
Середнім прискоренням називається векторна фізична величина, яка дорівнює відношенню зміни вектора швидкості до проміжку часу, протягом якого ця зміна відбувається.
![]() ,
,
![]() .
.
Миттєве
прискорення
– перша похідна швидкості за часом:
![]()
Основна
задача механіки
(ОЗМ) – визначення положення точки у
будь-який момент часу. Для розв’язання
ОЗМ необхідно знайти рівняння залежності
радіуса-вектора від часу. Нехай
![]() .
Рух тіла, при якому його швидкість не
змінюється, називають рівноприскореним.
.
Рух тіла, при якому його швидкість не
змінюється, називають рівноприскореним.
Так
як
![]() ,
то
,
то
![]() ,
і
,
і
![]() ,
,![]() ,
,![]() ,
,
![]() ,
,
![]() .
.
Рівняння
руху тіла при
![]() :
:
![]() .
.
З отриманого рівняння випливає, що для розв’язання ОЗМ необхідно визначити початкові умови і знати залежність прискорення точки від часу.
Координатний спосіб. З точкою відліку жорстко зв'язують систему координат. Проекції радіус-вектора на обрані вісі мають вигляд:
![]() ,
,
![]() ,
,![]() .
.
За законом руху знаходяться залежності швидкості і прискорення від часу, а так само модуль швидкості і прискорення:
![]() ,
,
![]() ,
,![]() ,
,![]() .
.
![]() ,
,
![]() ,
,![]() ,
,
![]() .
.
Напрямок
вектора визначається зі співвідношенням:
![]() або
або
![]() .
.
Зворотна задача розв’язується так само, як і при векторному способі.
П
 риродничий
спосіб.
При цьому способі траєкторія точки
відома завчасно. Положення точки А
визначають дуговою координатою
риродничий
спосіб.
При цьому способі траєкторія точки
відома завчасно. Положення точки А
визначають дуговою координатою
 – відстанню уздовж траєкторії від
обраного початку відліку до даної
точки. Виберемо одиничний вектор
– відстанню уздовж траєкторії від
обраного початку відліку до даної
точки. Виберемо одиничний вектор
 у точці А, який спрямований по дотичній
до траєкторії в даній точці в сторону
зростання дугової координати.
у точці А, який спрямований по дотичній
до траєкторії в даній точці в сторону
зростання дугової координати.
Швидкість
точки А можна представити:
![]() ,
де
,
де
![]() – проекція вектора швидкості на напрямок
– проекція вектора швидкості на напрямок
![]() .
.
![]() ,
,
![]()
Прискорення точки А.
![]() ,
,
![]() ,
,![]() .
.
П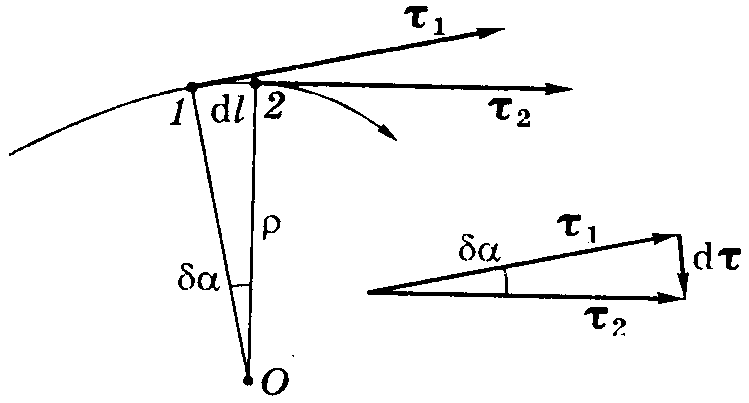 еретворимо
другий доданок останнього виразу:
еретворимо
другий доданок останнього виразу:
![]() .
.
Після підстановки одержуємо:
![]() .
.
Розглянемо
поворот точки на відстань
![]() :
:
![]() ,
,
![]() .
.
Підставивши останній вираз у форму прискорення, одержуємо:
![]() .
.
Перший доданок являє собою тангенціальне прискорення, обумовлене зміною швидкості за модулем:
![]()
Д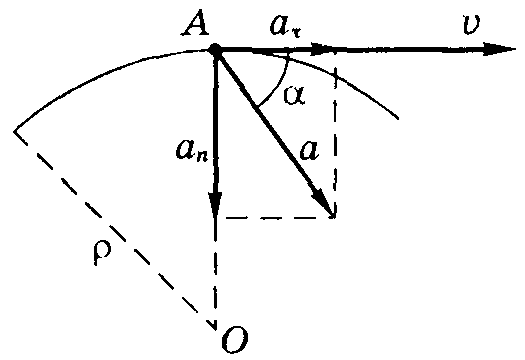 ругий
доданок являє собою нормальне прискорення,
обумовлене зміною швидкості за напрямком:
ругий
доданок являє собою нормальне прискорення,
обумовлене зміною швидкості за напрямком:
![]() .
.
Повне прискорення у будь-якій точці визначається як векторна сума тангенціального і нормального прискорень:
![]() .
.
Модуль повного прискорення дорівнює:
![]() .
.