

Научное помсобие 1All Tom 1 UA
.pdfФізичні основи механіки
в) Закон в’язкого тертя.
На тіло, що рухається у в’язкому (рідкому або газоподібному) середовищі, діє сила, яка гальмує його рух. Ця сила називається силою в’язкого тертя
|
F = −rv , |
(6.10) |
|
де v – швидкість руху тіла; |
|
||
r – коефіцієнт опору. |
|
||
|
Коефіцієнт r залежить від форми і розмірів тіла, харак- |
||
F |
теру його поверхні, а також від властивостей середовища. |
||
Знак «–» указує на те, що сила тертя спрямована протилежно |
|||
A |
|||
|
швидкості. Наприклад, якщо кулька діаметром d падає в рі- |
||
|
дині із сталою швидкістю v, то силу опору виражають за фо- |
||
mg |
рмулою Стокса* |
|
|
Рисунок 6.3 |
Fc = 3πdηv , |
(6.11) |
|
|
|
||
де η – в’язкість рідини.
г). Закон Архимеда*.
На тіло, що занурене в рідину або газ, діє виштовхуюча сила, яка дорівнює вазі витисненої тілом рідини або газу (рис. 6.3)
FA = ρж gV , |
(6.12) |
де ρж – густина рідини або газу;
V – об’єм зануреної частини тіла.
6.3 Складання сил
Як правило, на тіло діє не одна сила, а декілька. Рівнодійною декількох сил називається сила, дія якої еквівалентна одночасній дії цих сил. Рівнодійна дорівнює векторній сумі діючих сил. Складаються сили за правилом паралелограма (рис. 6.4).
F
1
F
F
2
Рисунок 6.4
F = F1 + F2 ,
Fr – рівнодійна (результуюча) сил Fr1 і Fr2 . З теореми
косинусів випливає, що модуль рівнодійної двох сил розраховується за формулою:
F = Fr =  F12 + F22 + 2F1F2 cosα .
F12 + F22 + 2F1F2 cosα .
________________________________________________________________________________
*Стокс Джорж Габріел (1819–1903 р.), англійський учений ірландського походження. *Архимед з Сиракуз (ок. 287–212 до н.е.), старогрецький математик, механік і астроном.
29
Фізичні основи механіки
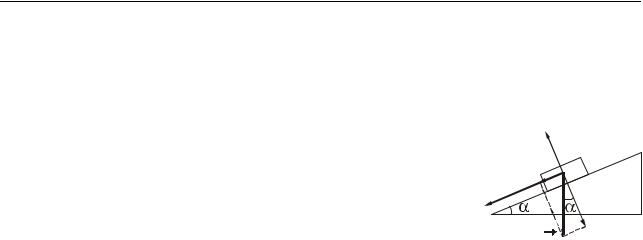
6.4 Розкладання сил
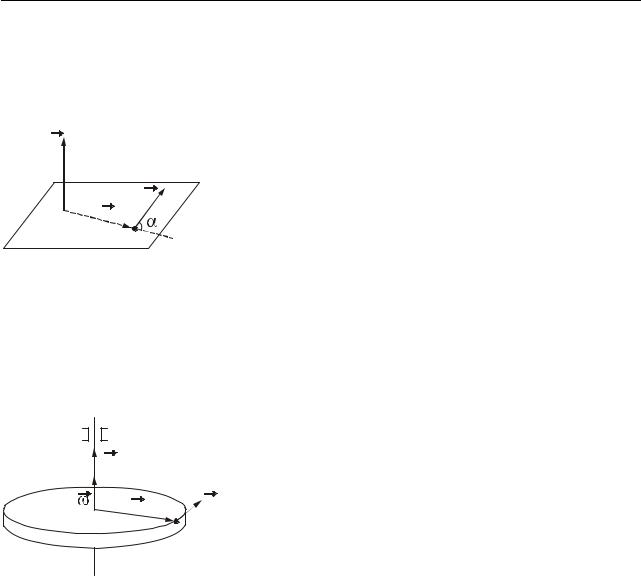
Для спрощення аналізу фізичних процесів і математичних викладень нерідко доводиться вдаватися до розкладання сил на складові за яким-небудь напрямом. Розкладання вектора на складові полягає в заміні вектора двома або
декількома векторами, сума яких дорівнює даному векто- |
y |
ру. Векторну величину можна повністю характеризувати |
0 |
проекціями даного вектора на осі прямокутної системи |
|
координат. |
x |
Звичайно при знаходженні проекцій вектора споча- |
mg |
тку знаходять його складові по осях. Для цього з початку |
|
і кінця вектора опускають перпендикуляри на відповідні |
Рисунок 6.5 |
координатні осі (рис 6.5). Якщо складова співпадає з додатним напрямом осі, то проекцію беруть із знаком «плюс», якщо ні, то із зна-
ком «мінус». На рис. 6.5 проекція сили тяжіння mg на вісь x дорівнює + mg sin α, а проекція на вісь у дорівнює − mg cos α :
Fx = (mg )x = +mg sin α , Fy = (mg )y = −mg cos α .
6.5 Основні закони динаміки матеріальної точки (закони Ньютона)
Динаміка базується на законах Ньютона, які математично не виводяться, а являються узагальненням досліду.
6.5.1 Перший закон Ньютона
Перший закон Ньютона встановлює факт існування інерціальних систем відліку і описує характер руху вільної матеріальної точки в інерціальній системі відліку.
Всяке тіло зберігає стан спокою або рівномірного прямолінійного руху до тих пір, поки дії з боку інших тіл не змінять цього стану.
Систему відліку, в якій виконується перший закон Ньютона, називають інерціальною. Тому, перший закон Ньютона можна сформулювати і таким чином.
Існують такі системи відліку, відносно яких тіло знаходиться в стані спокою або рухається прямолінійно і рівномірно, якщо на це тіло не діють інші тіла або дії цих тіл компенсуються.
Будь-яка інша система відліку, яка рухається відносно інерціальної із сталою швидкістю також є інерціальною.
30

Фізичні основи механіки
6.5.2 Другий закон Ньютона
Швидкість зміни імпульсу тіла дорівнює результуючій всіх сил, що діють на тіло:
|
|
|
r |
|
dp |
|
|
|
|
|
|
|
|
F = |
|
|
. |
|
|
|
(6.13) |
|
|
|
|
dt |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
Проведемо аналіз рівняння (6.13). Імпульс тіла дорівнює p = mv . Зробимо |
||||||||||
заміну в (6.13) і продиференціюємо добуток: |
|
|
|
|
||||||
|
|
r |
d(mv) |
|
|
dm r |
|
dv |
|
|
|
|
F = |
|
|
= |
dt v |
+ m |
|
. |
(6.14) |
|
|
dt |
|
dt |
||||||
1. Якщо |
dm |
≠ 0 , те це рівняння описує рух тіла із змінною масою. Рів- |
||||||||
|
dt |
|
|
|
|
|
|
|
|
|
няння (6.14) можна застосовувати не тільки в тих випадках, коли маса змінюється за часом (наприклад, при польоті ракети), але і при зміні маси із зміною швидкості. Це буває при великих швидкостях руху, наприклад, які наближаються до швидкості світла у вакуумі.
2. Якщо маса тіла залишається сталою m = const , тобто |
dm |
= 0 , то рів- |
|||
няння (6.14) матиме наступний вигляд: |
|
dt |
|
||
|
|
|
|||
r |
|
dv |
r |
|
|
F |
= m |
|
= ma , |
|
|
dt |
|
|
|||
|
F = mar. |
|
(6.15) |
||
Результуюча всіх сил, що діють на тіло, дорівнює добутку маси тіла на його прискоренняr .
3. Якщо F = const , то, помноживши обидві частини рівняння (6.13) на dt, отримаємо:
Fdt = dpr.
Проінтегруємо отримане рівняння
Fr |
t |
p |
|
∫2 dt = ∫2dpr, |
|
||
або |
t1 |
p1 |
|
F |
t = pr . |
|
|
|
(6.16) |
||
Величина, яка дорівнює добутку сили на час дії цієї сили Fr |
t , називаєть- |
||
ся імпульсом сили. Таким чином:
Імпульс сили дорівнює зміні імпульсу тіла.
На підставі другого закону Ньютона можна зробити висновок, що зміни швидкостей матеріальних точок або тіл відбуваються не миттєво, а протягом кінцевих проміжків часу.
31
Фізичні основи механіки
6.5.3 Третій закон Ньютона
Сили, з якими взаємодіють два тіла, рівні за величиною і протилежні за напрямом.
F12 = −F21 . |
(6.17) |
Таким чином, сили завжди виникають попарно. Сили, що фігурують у третьому законі Ньютона, прикладені до різних тіл, тому вони не врівноважують одна одну.
Закони Ньютона виконуються тільки в інерціальних системах відліку.
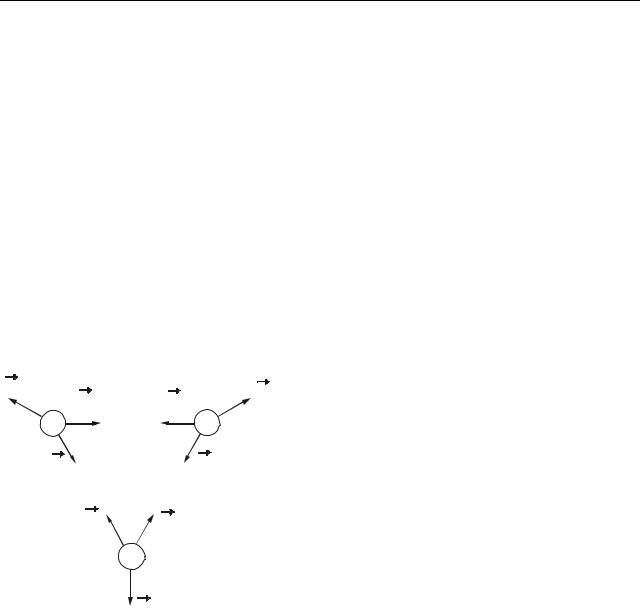
6.6 Динаміка системи матеріальних точок. Закон збереження імпульсу
Сукупність матеріальних точок (тіл), виділених для розгляду, називається механічною системою. Тіла системи можуть взаємодіяти як між собою, так і з тілами, що не входять в цю систему. Тому сили, які діють на тіла системи, ділять на зовнішні і внутрішні. Внутрішні си-
F |
|
|
|
|
|
|
|
|
|
|
F |
ли обумовлені взаємодією тіл, що входять в |
||||||||||||||
1 |
|
f1-2 |
|
f2-1 |
|
|
|
|
||||||||||||||||||
|
1 |
|
2 |
2 |
|
|
систему. Зовнішні сили обумовлені взаємо- |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
дією з тілами, що не входять в систему. |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
f1-3 |
|
|
|
|
f2-3 |
|
|
|
|
|
|
|
|
|
Система називається замкненою, якщо |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
на неї не діють зовнішні сили. |
|
||||||||||||||
|
|
|
f3-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Розглянемо систему тіл (рис. 6.6), які |
|||||||||
|
|
|
|
f3-2 |
|
|
|
|
|
|
|
взаємодіють як між собою, так і з зовнішні- |
||||||||||||||
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
ми тілами. |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Введемо позначення: |
|
|
||||||||
|
|
|
|
F |
|
|
|
|
|
|
|
|
fi−k |
– внутрішня сила, що діє на i-е тіло з |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
боку k-го тіла; |
|
|
|
|
|
|||||||||
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
Рисунок 6.6 |
|
|
|
|
|
|
|
Fi – рівнодійна зовнішніх сил, що діють на |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i-е тіло. |
|
|
|
|
|
|
|
|
||||
|
Для кожного тіла запишемо другий закон Ньютона. |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
dp |
r |
|
r |
|
r |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
= f |
+ f |
+ F |
, |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
dt |
|
1−2 |
|
|
1−3 |
|
1 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
dp |
r |
|
r |
|
r |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
= f |
2−1 |
+ f |
2−3 |
+ F |
|
, |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
2 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
dp |
r |
|
r |
|
r |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
3 |
|
= f |
+ f |
+ F |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
dt |
|
3−1 |
|
|
3−2 |
|
3 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Складемо рівняння почленно: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
d |
(pr |
+ pr |
+ pr |
) |
= (fr |
+ fr |
)+ (fr |
|
+ fr |
|
)+ (fr |
+ fr |
)+ Fr |
+ Fr |
+ Fr . |
|||||||||
|
|
|
|
|
||||||||||||||||||||||
|
|
dt |
1 |
2 |
3 |
|
1−2 |
|
|
|
2−1 |
|
1−3 |
|
3−1 |
|
|
2−3 |
3−2 |
1 |
2 |
3 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
32
Фізичні основи механіки
За третім законом Ньютона |
|
f1−2 = − f2−1 , |
fi−k = − fk−i , |
тому кожна з дужок дорівнює нулю. |
|
Сума зовнішніх сил, які діють на тіла системи, називається головним ве-
ктором зовнішніх сил.
F1 + F2 + F3 = F ,
де Fr – головний вектор зовнішніх сил.
Сума імпульсів тіл, що входять до системи: p1 + p2 + p3 = p ,
де pr – імпульс системи тіл.
Таким чином, для системи тіл отримаємо рівняння:
dp |
r |
|
|
|
= F . |
(6.18) |
|
dt |
|||
|
|
Швидкість зміни сумарного імпульсу системи тіл дорівнює головному вектору зовнішніх сил.
Припустимоr тепер, що головний вектор зовнішніх сил дорівнює нулю, тобто F = 0 . Така система є замкненою. У цьому випадку
ddtp = 0.
Якщо похідна деякої величини дорівнює нулю, то ця величина є сталою. Тому з останнього рівняння випливає, що p = const , або
p1 + p2 + p3 = const , |
(6.19) |
m1v1 + m2v2 + m3v3 = const . |
(6.20) |
Формули (6.19) і (6.20) виражають закон збереження імпульсу:
Імпульс замкненої системи матеріальних точок (тіл) залишається не змінним.
Розглянемо окремі випадки виконання закону збереження імпульсу. |
||
1. Нехай Fri ≠ 0, |
тобто на систему діють зовнішні сили, але їх векторна |
|
сума дорівнює нулю: |
N |
dp = 0. Це означає, що ім- |
∑Fri = 0. У цьому випадку |
||
|
i =1 |
dt |
пульс системи тіл зберігається.
33

Фізичні основи механіки
r |
|
N |
r |
|
2. Нехай Fi |
≠ 0, |
∑Fi |
≠ 0 , але дорівнює нулю сума проекцій цих сил на |
|
|
|
i=1 |
|
|
N
який-небудь напрям, наприклад, на напрям осі x: ∑Fix = 0 . З рівняння (6.18)
|
|
|
i =1 |
|
|
dpx |
|
N |
|
випливає, що для цієї проекції |
= 0 , а тому |
∑pix = const . Таким чином, по- |
||
dt |
||||
|
|
i =1 |
вний імпульс системи не зберігається, але зберігається проекція імпульсу на напрям осі x.
|
r |
|
N r |
|
3. Нехай |
Fi |
≠ 0 , |
∑Fi |
≠ 0 , але час дії сил dt дуже малий, тобто dt→0. При |
i=1
цьому dpr також прагне нуля: dp → 0 . У цьому випадку p = const − імпульс си-
стеми залишається незмінним.
Прикладом є взаємодія тіл при ударі, вибуху.
§7 Динаміка обертального руху
Під час вивчення законів руху матеріальної точки був введений ряд динамічних характеристик: маса, імпульс, сила. Якщо тверде тіло рухається поступально, то всі його точки рухаються по однакових траєкторіях, тобто з однаковою швидкістю.
Якщо тверде тіло обертається, то всі його точки рухаються по концентричних колах, центри яких лежать на одній прямій. Усі ці точки рухаються з різними лінійними швидкостями, а однаковою у них буде кутова швидкість ω. Тому необхідно ввести ряд нових фізичних величин – момент інерції, момент імпульсу, момент сили, які характеризують обертальний рух.
7.1Основні характеристики динаміки обертального руху
7.1.1Момент інерції
Розглянемо матеріальну точку масою mi , яка знаходиться на відстані ri
від нерухомої осі (рис. 7.1). Моментом інерції (J) матеріальної точки відносно осі називається скалярна фізична величина, яка дорівнює добутку маси mi на квадрат відстані ri до цієї осі:
ri
mi
Рисунок 7.1
J |
i |
= m r 2 . |
(7.1) |
|
i i |
|
Момент інерції системи матеріальних точок буде дорівнюватися сумі моментів інерції окремих точок.
N |
|
J = ∑mi ri2 . |
(7.2) |
i =1
34
Фізичні основи механіки
Момент інерції твердого тіла находять інтегруванням: |
|
J = ∫r 2dm . |
(7.3) |
m
Момент інерції тіла є мірою інертності тіла в обертальному русі навкруги нерухомої осі, подібно тому, як маса тіла є мірою його інертності при поступальному русі. Таким чином можна дати наступне визначення цей величини.
Момент інерції – це міра інертних властивостей твердого тіла при обертальному русі, яка залежить від розподілу маси відносно осі обертання. Іншими словами, момент інерції залежить від маси, форми, розмірів тіла і положення осі обертання.
Обчислення інтеграла (7.3) є достатньо складною задачею, тому наведемо формули для розрахунку моменту інерції деяких тіл правильної геометричної форми відносно осі, що проходить через центр мас (див. табл. 7.1)
Момент інерції тіла відносно довільної осі розраховується за допомогою
теореми Штейнера*.
Момент інерції тіла відносно довільної осі дорівнює сумі моменту інерції відносно осі, яка проходить через центр мас паралельно даної, і добутку маси тіла на квадрат відстані між осями.
J = Jc + md 2 . |
(7.4) |
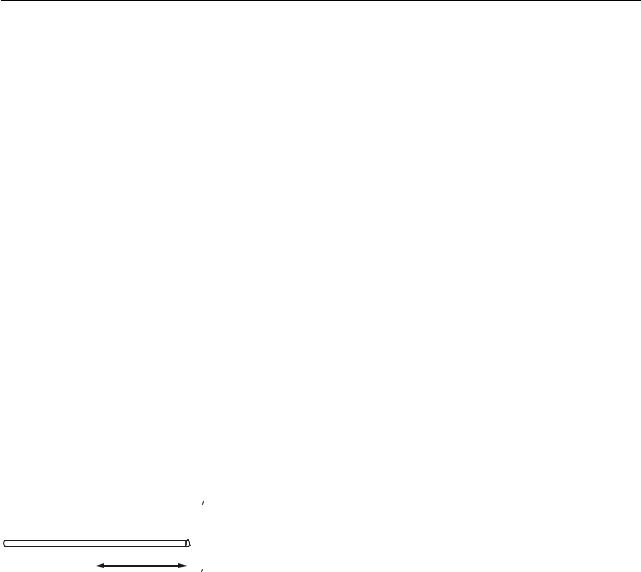
Приклад: Знайдемо момент інерції стрижня відносно осі, яка проходить через
O |
|
|
|
O кінець стрижня перпендикулярно до нього (рис. 7.2). |
|||||||||
|
|
||||||||||||
|
|
d=1/2 |
|
Jo'o' = Jc + md 2 , |
|
d = |
l |
, |
|||||
|
|
|
|||||||||||
|
|
|
|
||||||||||
|
|
|
|||||||||||
O |
|
|
O |
|
|
2 |
|
||||||
|
|
|
|
l 2 |
|
ml2 |
|
|
|
||||
Рисунок 7.2 |
|
Jo'o' = |
1 |
ml2 |
+ m |
= |
. |
(7.5) |
|||||
|
|
|
|
||||||||||
12 |
|
4 |
3 |
|
|
|
|||||||
Слід зазначити, що будь-яке тіло, незалежно від того, обертається воно або перебуває в спокої, має момент інерції відносно будь-якої осі, подібно тому, як тіло має масу незалежно від того, рухається воно або знаходиться у спокої. Аналогічно масі момент інерції є величиною адитивною.
7.1.2 Момент імпульсу
а) Момент імпульсу матеріальноїr точки відносно точки обертання О. Моментом імпульсу ( L ) матеріальної точки відносно точки О називаєть-
сяr векторна фізична величина, яка дорівнює векторному добутку радіус-вектора r , проведеного з точки О в місце знаходження матеріальної точки, на вектор її імпульсу pr :
L = rr× pr. |
(7.6) |
________________________________________________________________________________
*Штейнер Якоб (1796–1863), німецький математик.
35

Фізичні основи механіки
Таблиця 7.1. Формули для розрахунку моменту інерції тіл правильної геометричної форми відносно осі, яка проходить через центр мас.
|
Тело |
|
Формула |
||
1. |
R |
|
|
|
|
|
|
|
2 mR2 |
|
|
|
Куля |
J= |
|
||
|
|
|
|
5 |
|
2. |
R2 |
|
|
|
|
|
|
|
|
|
|
|
R1 |
|
|
|
|
|
Товстостінний |
J= |
1 m(R2+R2) |
||
|
циліндр |
|
2 |
1 |
2 |
|
|
|
|
||
3. R2
Тонкостінний
циліндр J=mR2
R1 R1 R2
4. |
|
|
|
|
l |
Стержень |
J= |
1 ml 2 |
|
12 |
|
|||
5. |
R |
|
1 |
2 |
|
|
|||
|
Диск |
J= |
2 mR |
|
Модуль моменту імпульсу матеріальної точки:
|
|
L = rpsin α. |
(7.7) |
[L] = |
кг м2 |
. |
|
с |
|
||
|
|
|
|
|
Вектор Lr спрямований перпендикулярно до площини, в якій лежать пе- |
||
ремножуванніr вектори. Якщо дивитися з кінця вектора L , то найкоротший поворот від r до pr відбувається проти годинникової стрілки (рис. 7.3).
36
Фізичні основи механіки
Якщо матеріальна точка рухається по колу радіусу r, то модуль моменту імпульсу відносно центру кола дорівнює
L = mvr , |
(7.8) |
оскільки кут між векторами v і r дорівнює α=90°.
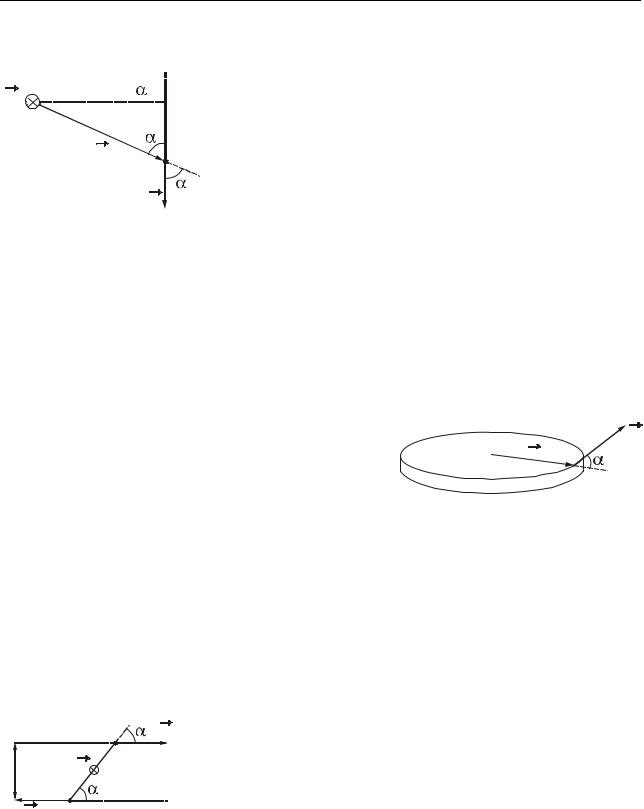
Lб) Момент імпульсу тіла відносно нерухомої осі обертання z.
p
O r
r
m
Рисунок 7.3
Момент імпульсу (Lz) тіла відносно осі z буде дорівнювати сумі проекцій моментів імпульсів окремих точок на цю вісь:
N |
|
Lz = ∑Li z . |
(7.9) |
i =1
Розглянемо однорідне тверде тіло (для простоти зображення обраний диск), що обертається навколо нерухомої осі z. Виділимо в ньому елементарний об’єм масою mi (рис. 7.4). У відповідності до (7.8) момент імпульсу матеріальної точки:
z
Li = mi vi ri
L |
Лінійна швидкість vi пов’язана з кутовою швидкі- |
r mi |
v стю ω співвідношенням |
|
vi = ωri |
|
Зробивши заміну, отримаємо |
Рисунок 7.4 |
Lz = ∑ri2 mi ω. |
∑ri2 mi = J z , |
|
де Jz – момент інерції тіла відносно осі z. |
|
Тоді |
|
Lz = J zω. |
(7.10) |
Оскільки вектор ω спрямований по осі обертання, то вектор Lr |
також буде |
спрямований по осі обертання. Тоді формулу (7.10) можна переписати у векторному вигляді
r |
(7.11) |
L = J ω. |
7.1.3 Момент сили
Для характеристики зовнішньої механічної дії на тіло, що приводить до обертального руху тіла, вводять поняття моменту сили.
а) Момент сили відносно нерухомої точки.
37
Фізичні основи механіки
Моментом сили ( Mr ) відносно точки О називається векторна фізична величина, яка дорівнює векторному добутку радіус-вектора r , проведеного з точ-
|
|
ки О в точку до який прикладена |
сила, на силу |
M |
d=rsin |
Fr (рис. 7.5). |
|
|
O |
M = rr× F . |
(7.12) |
|
r |
Модуль моменту сили визначається співвідношен- |
|
|
|
ням: |
|
|
F |
M = rF sin α = Fd . |
(7.13) |
|
Рисунок 7.5 |
[M ] = Н м. |
|
|
|
|
|
Величина d = r sin α називається плечем сили. Плече сили – це довжина перпендикуляраr, опущеного з точки О на лінію дії сили (рис. 7.5).
Вектор M спрямований перпендикулярно до площини, в якій лежать перемножені векториr , причому так, що напрям обертання, обумовленого силою, і напрям вектору M утворюють правогвинтову систему.
б) Момент сили відносно нерухомої осі z. |
Z |
|
|
|
|||
|
|
|
|
|
|
||
|
|
|
|
|
|
||
Розглянемо тіло, що обертається навколо |
|
|
|
|
|
F |
|
нерухомої осі z під дією сили F . Сила F ле- |
|
|
|
|
|
||
|
O |
|
|
r |
|||
жить в площині, перпендикулярній до осі обер- |
|
|
|
A |
|||
тання (рис. 7.6). |
|
|
|
|
|
||
|
|
|
|
|
|
||
Моментом сили (М) відносно осі нази- |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
||
вається скалярна фізична величина, яка дорів- |
Рисунок 7.6 |
||||||
нює добутку модуля сили на плече сили: |
|||||||
|
|
|
|
|
|
||
Mz = Fd , |
|
|
|
|
(7.14) |
||
де d = r sin α – плече сили. в) момент пари сил.
Дві рівні за модулем і протилежно спрямовані сили, які не діють уздовж
однієї прямої, називаються парою сил. Відстань d між прямими, уздовж яких діють сили, називається плечем пари (рис. 7.7). Модуль
|
|
F |
моменту пари сил дорівнює добутку модуля сили на |
|
d |
M |
r |
плече пари |
|
|
|
|
||
|
F |
|
M = rF sin α = Fd . |
(7.15) |
|
|
|
|
|
|
Рисунок 7.7 |
Вектор моменту M пари сил перпендикулярний |
||
|
|
|
до площини, в якій лежать сили. |
|
7.2 Основне рівняння динаміки обертального руху
Продиференціюємо за часом рівняння (7.6), яке записане для матеріальної точки:
38