

5 Схеми й опис приладів і пристосувань, застосовуваних при виконанні окремих видів робіт при обслуговуванні устаткування з програмним керуванням
Вивчення пускорегулирующей контактної і безконтактної апаратури
Безконтактними електричними апаратами називають пристрої, призначені для включення і відключення (комутації) електричних ланцюгів без фізичного розриву самої ланцюга. Основою для побудови безконтактних апаратів служать різні елементи з нелінійним електричним опором, величина якого змінюється в досить широких межах, в даний час це - транзистори, тиристори й раніше використовувалися магнітні підсилювачі.
Переваги й недоліки безконтактних апаратів порівняно зі звичайними пускачами і контакторами
Порівняно з контактними апаратами безконтактні мають переваги:
- не утворюється електрична дуга, руйнує деталі апарату; час спрацьовування може досягати невеликих величин, тому вони припускають більшу частоту спрацьовувань (сотні тисяч спрацьовувань на годину),
- не зношуються механічно,
В той же час, у безконтактних апаратів є й недоліки:
- вони не забезпечують гальванічну розв'язку в ланцюзі і не створюють видимого розриву в ній, що важливо з точки зору техніки безпеки;
- глибина комутації на кілька порядків менше контактних апаратів,
- габарити, вагу та вартість на порівняні технічні параметри вище.
Безконтактні апарати, побудовані на напівпровідникових елементів, дуже чутливих до перенавантаження і надструмам. Чим більше номінальний струм елемента, тим нижче зворотне напруга, яка здатна витримати цей елемент не провідниковому стані. Для елементів, розрахованих на струми в сотні ампер, це напруга вимірюється кількома сотнями вольт.
Можливості контактних апаратів в цьому відношенні необмежені: повітряний проміжок між контактами довжиною 1 см здатний витримати напругу до 30000 В. Напівпровідникові елементи допускають лише короткочасне перевантаження струмом: протягом десятих секунди може протікати струм порядку десятиразового по відношенню до номінального. Контактні апарати здатні витримувати стократні перевантаження струмом протягом зазначених відрізків часу.
Безконтактні апарати не можна замінити контактними в умовах великої частоти спрацьовувань і великого швидкодії.
Безумовно, безконтактні апарати навіть при великих струмах кращі, коли потрібно забезпечити підсилювальний режим управління ланцюгом. Але в даний час контактні апарати мають визначені переваги перед безконтактними, якщо при відносно великих струмів і напруг потрібно забезпечувати комутаційний режим, тобто просте відключення і включення ланцюгів з струмом при невеликій частоті спрацьовувань апарату.
Істотним недоліком елементів електромагнітної апаратури, комутуючих електричні ланцюги, є низька надійність контактів. Комутація великих значень струму пов'язана з виникненням електричної дуги між контактами у момент розмикання, яка викликає їх нагрівання, оплавлення і, як наслідок, вихід апарату з ладу.
Електромагнітні реле управління
Реле - електричний апарат, призначений для комутації електричних ланцюгів (стрибкоподібного зміни вихідних величин) при заданих зміни електричних або не електричних вхідних величин.
Релейні елементи (реле) знаходять широке застосування в схемах управління і автоматики, оскільки з їх допомогою можна управляти великими потужностями на виході при малих по потужності вхідні сигнали; виконувати логічні операції; створювати багатофункціональні релейні пристрою; здійснювати комутацію електричних ланцюгів; фіксувати відхилення контрольованого параметра від заданого рівня; виконувати функції запам'ятовуючого елемента і т. д.
Класифікація реле
Реле класифікуються за різними ознаками: за увазі вхідних фізичних величин, на які вони реагують; за функціями, які вони виконують в системах управління; по конструкції і т. д. По виду фізичних величин розрізняють електричні, механічні, теплові, оптичні, магнітні, акустичні і т.д. реле. При цьому слід зазначити, що реле може реагувати не тільки на значення конкретної величини, але і на різниця значень (диференціальні реле), на зміна знака величини (поляризовані реле) або на швидкість зміни вхідної величини.
Пристрій реле
По устройству виконавчого елемента реле підрозділяються на контактні та безконтактні.
Контактні реле впливають на керовану ланцюг з допомогою електричних контактів, замкнутий або розімкнуте стан яких дозволяє забезпечити повне або замикання або повний механічний розрив вихідний ланцюга.
Безконтактні реле впливають на керовану ланцюг шляхом різкого (стрибкоподібного) зміни параметрів вихідних електричних ланцюгів (опору, індуктивності та ємності) або зміни рівня напруги (струму).
Характеристики реле
Основні характеристики реле визначаються залежностями між параметрами вихідний та вхідний величини.
Розрізняють наступні основні характеристики реле.
1. Величина спрацьовування Хср реле - значення параметра вхідної величини, при якій реле включається. При Х < Хср вихідна величина дорівнює Uмін, при Х3 Хср величина U стрибком змінюється від Uмін до Uмах і реле включається. Величина спрацьовування, на яку відрегульоване реле, називається уставкою.
2. Потужність спрацьовування Рср реле - мінімальна потужність, яку необхідно підвести до що сприймає органу для переведення його зі стану спокою в робочий стан.
3. Керована потужність Рупр - потужність, якою керують комутуючі органи реле в процесі перемиканні. По потужності управління розрізняють реле ланцюгів малої потужності (до 25 Вт), реле ланцюгів середньої потужності (до 100 Вт) і реле ланцюгів підвищеної потужності (понад 100 Вт), які відносяться до силових реле й називаються контакторами.
4. Час спрацьовування tср реле - проміжок часу від подачі на вхід реле сигналу Хср до початку впливу на керовану ланцюг. З часу спрацьовування розрізняють нормальні, швидкодіючі, уповільнені реле, реле часу. Зазвичай для нормальних реле tср = 50...150 мс, для швидкодіючих реле tср 1 с.
Принцип дії і пристрій електромагнітних реле
Електромагнітні реле, завдяки простим принципом дії і високої надійності, отримали широке застосування в системах автоматики і в схемах захисту електроустановок. Електромагнітні реле діляться на реле постійного і змінного струму. Реле постійного струму діляться на нейтральні і поляризовані. Нейтральні реле однаково реагують на постійний струм обох напрямків, що протікає по його обмотці, а поляризовані реле реагують на полярність керуючого сигналу.
Робота електромагнітних реле заснована на використанні електромагнітних сил, що виникають у металевому сердечнику при проходженні струму по витків його котушки. Деталі реле монтуються на підставі та закривають кришкою. Над сердечником електромагніту встановлений рухливий якір (пластина) з одним або кількома контактами. Навпроти них знаходяться відповідні парні нерухомі контакти.
У вихідному положенні якір утримується пружиною. При подачі напруги електромагніт притягує якір, долаючи її зусилля, і замикає або розмикає контакти в залежності від конструкції реле. Після відключення напруги пружина возвращает якір у вихідне положення. В деякі моделі можуть бути вбудовані електронні елементи. Це резистор, підключений до обмотці котушки для більш чіткого спрацьовування реле, або (і) конденсатор, паралельний контактів для зниження іскріння і перешкод.
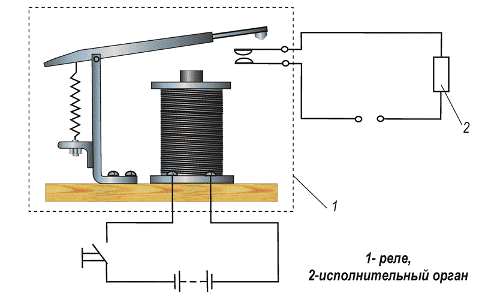
Керований ланцюг електрично ніяк не пов'язана з керуючою частиною, більш того в керованго ланцюга величина струму може бути набагато більше, ніж в керуючої ланки. Тобто реле по суті виконують роль підсилювача струму, напруги і потужності в електричному колі.
Реле змінного струму спрацьовують при подачі на їх обмотки струму певної частоти, тобто основним джерелом енергії є мережа змінного струму. Конструкція реле змінного струму нагадує конструкцію реле постійного струму, тільки сердечник і якір виготовляються з листів електротехнічної сталі, щоб зменшити втрати на гістерезис і вихрові струми.
Переваги й недоліки електромагнітних реле
Електромагнітне реле володіє рядом переваг, відсутніх у напівпровідникових конкурентів:
-здатність комутації навантажень потужністю до 4 кВт при обсязі реле менше 10 см3;
-стійкість до імпульсних перевантажень і руйнує перешкоди, що з'являються при розряді блискавок і в результаті комутаційних процесів у високовольтній електротехніці;
-виняткова електрична ізоляція між керуючої ланцюгом (котушкою) і контактною групою - останній стандарт 5 кВ є недосяжною мрією для переважної більшості напівпровідникових ключів;
-мале падіння напруги на замкнутих контактах, і, як наслідок, мале виділення тепла: при комутації струму 10 А малогабаритне реле сумарно розсіює на котушці і контактах менше 0,5 Вт, у той час як симисторное реле віддає в атмосферу більше 15 Вт, що, по-перше, вимагає інтенсивного охолодження, а
недоліки реле: мала швидкість роботи, обмежений (хоча і дуже великий) електричний і механічний ресурс, створення радіоперешкод при замиканні і розмиканні контактів і, нарешті, останнє та найнеприємніша властивість - проблеми при комутації індуктивних навантажень і високовольтних навантажень на постійному струмі.
Магнітним пускачем називається електричний апарат, призначений для пуску і відключення короткозамкнених асинхронних двигунів. Як правило, в пускач крім контактора вбудовані теплові реле для захисту двигуна від перевантажень струму і "втрати фази". Робота асинхронних двигунів в значній мірі залежить від таких властивостей пускачів, як зносостійкість, комутаційна здатність, надійність захисту двигуна від перевантаження. До двигуна підводяться тільки дві фази, і струм у статорі різко зростає, що приводить до виходу його з ладу через нагріву обмотки до високої температури. Теплові реле пускача від цих струмів повинні спрацьовувати і вимикати двигун.
При включенні асинхронного двигуна пусковий струм в 6 разів перевищує номінальний. При такому струмі навіть незначна вібрація контактів швидко виводить їх з ладу. Це накладає високі вимоги відносно вібрації і зносу контактів
При номінальних струмах до 100 А доцільні срібні накладки на мідних контактах. При струмі вище 100 А ефективна композиція срібла і оксиду кадмію.
Після розгону двигуна струм падає до номінального значення. Тому відключення працюючого двигуна відбувається при меншому струмовому навантаженні контактів.
Електрична зносостійкість контакторів пускача обернено пропорційна потужності керованого електродвигуна в ступеня 1,5-2. Для підвищення терміну служби пускача його необхідно вибирати на струм, що перевищує номінальний струм двигуна.
б) схема включення
.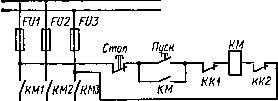

Рис. 2. Схема включення пускача
Головні контакти КМ1-КМЗ пускача включені послідовно з запобіжниками FU1-FU3. Котушка КМ контактора підключається до мережі через контакти теплових реле і кнопок управління "Пуск" і "Стоп". При натисканні кнопки "Пуск" напруга на котушку КМ подається через замкнені контакти кнопку "Стоп" і замкнені контакти теплових реле. При спрацьовуванні контактора замикаються допоміжні контакти КМ, шунтуючі останні контакти кнопки "Пуск", яку після цього можна відпустити. Для відключення двигуна натискається кнопка "Стоп", після чого контакти КМ1-КМЗ розмикаються. При струмового перевантаження двигуна спрацьовують КК1, КК2, контакти яких розривають ланцюг котушки КМ. При цьому контакти КМ1-КМЗ розмикаються, і двигун вимикається.
Контактори - це апарати дистанційного дії, призначені для частих включень і відключень силових електричних ланцюгів при нормальних режимах роботи. Контактор - це, мабуть, самий старий апарат, який застосовувався для управління електродвигунами. Найбільше поширення в усьому світі отримали контактори електромагнітні. Вони є основними коммутірующімі апаратами схем з струмами більше 50 А.
Класифікація контакторів
-за родом струму головного ланцюга і ланцюга керування (що включає котушки) - постійного, змінного, постійного і змінного струму;
-за кількістю головних полюсів - від 1 до 5;
-по номінальному струмі головного ланцюга - від 1,5 до 4800 А;
-по номінальній напрузі головного ланцюга: від 27 до 2000 В постійного струму; від 110 до 1600 В змінного струму частотою 50, 60, 500, 1000, 2400, 8000, 10 000 Гц;
-по номінальній напрузі що включає котушки: від 12 до 440 В постійного струму, від 12 до 660 В змінного струму частотою 50 Гц, від 24 до 660 В змінного струму частотою 60 Гц;
-за наявності допоміжних контактів - з контактами, без контактів.
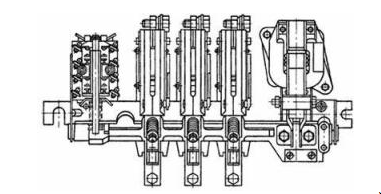
Контактори складаються з системи головних контактів, дугозгашувальної, електромагнітної систем і допоміжних контактів. Головні контакти здійснюю замикання і розмикання силового ланцюга.
Вони повинні бути розраховані на тривалий проведення номінального струму і на виробництво великої кількості включень і відключень при великій їх частоті. Нормальним вважають стан контактів, коли втягуюча котушки контактора не обтікається струмом та звільнені всі наявні механічні засувки.
Головні контакти можуть виконуватися важільного і містково типу. Важільні контакти припускають поворотну рухливу систему, містково - прямоходовую. На рисунку 5 представлена послідовна кінематика руху контакту контактора при замиканні.

Важільні контакти вимагають гнучкого зв'язку для приєднання до токопроводу, але і гнучкий зв'язок в ряді випадків є слабким місцем контактної системи. Її важко здійснити на великі струми і її механічна зносостійкість виявляється нижче, ніж інших деталей.
Контактори змінного струму виконуються з дугогасительными камерами з ионними ґратами. При появі, дуга рухається на решітку, розбивається на ряд дрібних дуг і в момент переходу струму через нуль гасне. Погасити дугу на змінному струмі в принципі легше ніж на постійному, тому контактори постійного струму мають більш складну систему дугогашения.
Електромагнітна система контактора забезпечує дистанційне керування контактором, тобто включення і відключення. Конструкція системи визначається родом струму і ланцюга управління контактора і його кінематичної схеми.
Електромагнітна
система складається з серцевини, якорі,
котушки і кріпильних деталей. На рисунку
6 показана схема включення електродвигуна
з допомогою електромагнітного
контактора.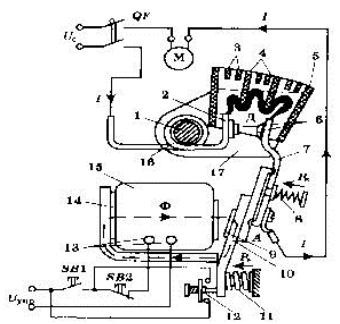
У вихідному відключеному положенні, коли напруги з котушки 15 знято, рухома система під дією пружини 11 перебуває в нормальному положенні. Контактор включають шляхом натискання кнопки SB1. В котушці створюється магнітний потік, який притягує якір 10 до сердечника 14. Одночасно з головними контактами замикаються додаткові контакти 12, які блокують (шунтує) контакти кнопки SB1. Контактна натискання здійснюється пружиною 8. На якорі 10 встановлена прокладка з немагнітного матеріалу 9, яка зменшує силу тяжіння і при зняття напруги з котушки якір відразу відходить і не залипає.
Електромагнітна система може розраховуватися на включення якоря і утримання його в замкнутому положенні або тільки на включення якоря. Утримання його в замкнутому положенні в цьому випадку здійснюється засувкою. Відключення контактора відбувається після знеструмлення котушки під дією відключає пружини, або власної ваги рухомий системи, але частіше пружини. У контакторах з засувкою, крім електромагнітної системи включення, є друга електромагнітна система, яка виробляє звільнення рухомий системи з під засувки.
Контактори постійного струму. В даний час застосування контакторів постійного струму і, відповідно, нові розробки тому скорочуються. Контактори постійного струму випускаються в основному на напругу 22 і 440 В., струми до 630 А., однополюсні і двополюсні.
Контактори серії ККД 100Е призначені для комутації головних ланцюгів і ланцюгів керування електроприводом постійного струму напругою 220В. Контактори выпускаютя на номінальні струми від 25 до 250 А. Контактори серії КПВ 600 призначені для комутації головних ланцюгів електроприводів постійного струму. Контактори цієї серії мають два виконання: з одним замикаючим головним контактом КПВ (600) і з одним розмикальним головним контактом КПВ (620). Управління контакторами здійснюється від мережі постійного струму. Контактори выпускаютя на номінальні струми від 100 до 630 А. Контактор на струм 100 А має масу 5,5 кг, на 630 А - 30 кг.
Контактори змінного струму. Контаткторы змінного струму будуються, як правило, трехполюсными з замикаючими головними контактами. Електромагнітні системи виконуються шихтованными, тобто набраними з окремих ізольованих один від одного пластин товщиною до 1 мм. Котушки низькоомні з малою кількістю витків. Основну частину опору котушки складає її індуктивний опір, яке залежить від величини зазору. Тому струм в котушки контактора змінного струму при розімкнутого системі в 5-10 разів перевищує струм при замкнутої магнітної системи. Електромагнітна система контакторів змінного струму має короткозамкнений виток на сердечнику для усунення шум і вібрації.
На відміну від контакторів постійного струму режим включення контакторів змінного струму більш важкий ніж режим відключення за пускового струму асинхронних електродвигунів з короткозамкненим ротором.
Шляхові вимикачі
Шляхові безконтактні вимикачі (перетворювачі шляху, що працюють без механічного впливу з боку бігаючого упору) застосовуються в схемах керування електроприводами верстатів, механізмів і машин. Безконтактні вимикачі призначені для комутації ланцюгів керування за допомогою електромагнітних реле або безконтактних логічних елементів, яка здійснюється під впливом керуючого елементу.
Класифікація безконтактних шляхових вимикачів
Шляхові безконтактні вимикачі можуть бути класифіковані по: способу впливу на чутливий елемент, фізичній принципом дії перетворювача, конструктивного виконання, класу точності, ступені захисту.
За способом впливу на чутливий елемент шляхові безконтактні вимикачі можуть бути розділені на вимикачі механічного і параметричного дії.
-Класифікація безконтактних шляхових вимикачів по фізичній принципом дії перетворювача включає в себе наступні види:
-Індуктивні вимикачі, побудовані на зміну індуктивності, взаімоіндуктівності, а також індукційні вимикачі.
В даний час більшість серійно випускаються промисловістю безконтактних шляхових вимикачів - це індуктивні апарати.
У свою чергу перетворювачі індуктивних безконтактних шляхових вимикачів можуть бути побудовані по наступних схемах: резонансної, автогенераторной, диференціальної, мостовий, безпосереднього перетворення.
--Магнітоіндуктівние вимикачі, які побудовані на наступних принципах: ефект Холу, магніторезісторном, магнітодіодном, магнітотірісторном, геркон.
--Ємнісні вимикачі: з змінюється площею пластин, із змінним зазором між пластинами, з змінюється діелектричної проникністю зазору між пластинами.
--Фотоелектронні вимикачі з елементами: фотодіоднимі, фототранзісторнимі, фоторезісторнимі, фототірісторнимі.
--Фотоелектричні вимикачі і примикають до них променеві вимикачі, в яких поряд з променями видимого світла можуть використовуватися промені іншої фізичної природи, наприклад радіоактивне випромінювання.
За конструктивним виконанням шляхові безконтактні вимикачі підрозділяються на: щілинні, кільцеві (полукольцевие), площинні, торцеві, вимикачі з механічним приводом, багатоелементні вимикачі.
Поділ безконтактних шляхових вимикачів торцевого і площинного виконань носить певною мірою умовний характер, оскільки рух керуючого елемента щодо чутливої поверхні може для деяких видів безконтактних шляхових выключталелей здійснюватися як у паралельній, так і в перпендикулярній площинах. У цьому випадку за основу може бути прийнято його переважне використання.
По класу точності (величиною основної похибки) шляхові безконтактні вимикачі діляться на вимикачі низькою (приблизно ±0,5 мм і більше), середньої [приблизно ±(0,05-0,5 мм], підвищеної [приблизно ±(0,005-0,05 мм)] і високою (приблизно ±0,005 мм і менше) точності.
Безконтактні перемикачі щілистого типу БВК-24
На
рис. 1, а показано загальний вигляд
перемикача типу БВК-24. Його магнітопровід,
розміщений в корпусі 4, складається з
двох феритових сердечників 1 і 2 з
повітряним зазором шириною 5-6 мм між
ними. У серцевині 1 розміщується первинна
обмотка wк і обмотка позитивного
зворотного зв'язку wп.с, в основному 2 -
обмотка негативного зворотного зв'язку
wо.с. Такий магнітопровід виключає вплив
зовнішніх магнітних полів. Котушки
зворотного зв'язку включені послідовно
- зустрічно. Як перемикає елемента
використовується алюмінієвий пелюсток
(платівка) 3 товщиною до 3 мм, який може
переміщатися в щілини (у повітряний
проміжок) магнітної системи датчика.
Якщо пелюстка знаходиться поза сердечника, то різниця напруги, індукованих в обмотках wп.с і wо.с, буде позитивною, транзистор VT1 закритий і генерація незатухающих коливань у контурі wк - С3 (мал. 1, б) не виникає. При введенні пелюстки в щілину датчика зв'язок між котушками wк і wо.с послаблюється (тому пелюстка ще називають екраном), на базу транзистора VT1 подається негативне напруга і він відкривається. В контурі wк - С3 виникає генерація і з'являється змінний струм, який индуктирует ЕРС в котушці wп.с в ланцюзі бази транзистора. У ланцюзі бази транзистора VT1 відбувається детектування змінної складової струму бази. Транзистор відкривається, викликаючи спрацьовування реле.
Для стабілізації роботи транзистора при коливаннях температури і напруги служить нелінійний дільник напруги, що складається з лінійного елемента - R1, напівпровідникового терморезистора R2 і діода VD2.
Похибка спрацьовування становить 1-1, 3 мм. Напруга живлення перемикача БВК-24 складає 24 В.
Індукційні машини
Індукційна машина здатна працювати як генератор, якщо рух ротора випереджає рух магнітного поля. У цьому випадку індукційна машина може віддавати електроенергегію в лінію, коли машина працює як електродвигун. Індукційна машина може віддавати активні вати, якщо живиться від реактивної потужності, що забезпечує магнітне поле струмом, зміщеним по фазі щодо напруги.
Сельсин - індукційна машина системи індукційної зв'язку. Сельсинами називаються електричні мікро машини змінного струму, що володіють властивістю самосинхронизации. Сельсин передачі працює за принципом звичайної механічної передачі, тільки обертальний момент між валами передається не зубами шестірень, а магнітним потоком без безпосереднього контакту. Використовується в системах автоматики і контролю часто виникає необхідність синхронного та синфазних обертання або повороту двох і більше вісей, механічно не пов'язаних один з одним. Такі завдання вирішуються за допомогою систем синхронної зв'язку. Найпростіший сельсин складається з статора з трифазної обмоткою (схема включення - трикутник або зірка) і ротора з однофазною обмоткою. Два таких пристрою електрично з'єднуються один з одним однойменними висновками - статор зі статором і ротор з ротором. На ротори подається однакову змінну напругу. При таких умовах обертання ротора одного сельсина викликає обертання ротора іншого сельсина. При повороті одного з сельсинів (сельсин-датчика) на певний кут у ньому наводиться ЕРС, відмінна від початкової. Оскільки сельсины (їх ротори) з'єднані, то ця ж ЕРС буде виникати і в другому сельсине (сельсин-приймачі) і за правилом лівої руки він відхилиться від початкового положення на той же кут.

Рисунок - система з двох сельсин
Вентильні перетворювачі
Метою даного розділу є знайомство з електричними параметрами елементів силової електроніки, з яких, згідно з концепцією вентильного перетворювача, конструюються конкретні пристрої силової електроніки.
1.3.1. СИЛОВІ НАПІВПРОВІДНИКОВІ ПРИЛАДИ
Основи силової електроніки, виконуються на силових напівпровідникових вентилях: некерованих (діодах) і керованих (тиристори, транзистори). Керовані вентилі розділяються на два класи:
1) вентилі з неповним управлінням;
2) вентилі з повним управлінням.
1.3.1.1. Вентилі з неповним управлінням
Вентилі з неповним управлінням характеризуються тим, що перехід їх зі стану вимкнено в стан включений, можливий шляхом хоча б короткочасної дії малопотужним сигналом з ланцюга керування за умови наявності на вентилі прямої напруги, тобто напруги такий полярності, при якій вентиль може пропускати струм через себе. Перехід вентиля зі стану включено в стан вимкнено, тобто замикання вентиля і припинення протікання прямого струму через нього, можливо тільки при зміні полярності напруги на вентилі (зворотне напруга) за силового ланцюга, а не в результаті впливу ланцюга керування. Таким чином, неповна керованість означає, що вентиль можна включити впливом за ланцюга керування, але неможливо вимкнути впливом по управлінню, а потрібно змінити полярності напруги на вентилі на зворотній.
Вентилі з повним управлінням характеризуються тим, що як включення і вимикання (замикання) їх можливо шляхом впливу малопотужними сигналами з ланцюга управління при наявності на вентилі прямої напруги. Головними представниками не повністю керованих вентилів є тиристори чотирьохшарові p-n-p-n напівпровідникові прилади з анодом А (крайня p-область), катодом (крайня n-область) і керуючим електродом УЕ (внутрішня область) і сімістори п ` ятишарові p-n-p-n-p напівпровідникові прилади, які можна представити у вигляді комбінації двох зустрічно паралельнопід'єднаних чотиришарових (тиристорних) p-n-p-n структур.
На
малюнку наведені схемне позначення
тиристора і його вольт-амперна
характеристика. На малюнку 2 показані
схемне позначення симістора (симетричного
тиристора, триака) і його вольт-амперна
характеристика
Основними параметрами тиристорів, визначальними можливості їх використання в різних конкретних схемах перетворювачів, є наступні:
- середнє значення анодного струму тиристора Ia, за яким він маркується заводом-виготовлювачем виходячи з рівня допустимих втрат активної потужності (виділення тепла) в вентиля при проходженні прямого струму. Випробувальний струм вентилів при їх виробництві має вигляд напівхвилі синусоїди в кожному періоді мережевої напруги (50 Гц). При цьому коефіцієнт амплітуди такого струму Ка= π (відношення амплітуди струму до середнього значення), коефіцієнт форми Кф = π/2 (відношення діючого значення струму до середнього). Тиристори випускаються на середній струм від 1 А до декількох тисяч ампер;
- струм утримування Іуд, мінімальне значення прямого струму тиристора у разі відсутності управління, коли тиристор ще залишається
проводять. При зниженні анодного струму нижче цього значення тиристор переходить в закрите положення;
- максимально допустиме пряме і зворотне напруги Umax на вентилі, яке він повинен витримувати без пробою. Маркується у вигляді класу вентиля по напрузі (бувають вентилі від 1 до 50 класів), множення якого на 100 визначає максимально допустима напруга;
- час відновлення керуючих властивостей тиристора t, яке визначається як мінімально необхідна тривалість програми до вентиля зворотного напруги (при його виключенні) після проходження прямого струму, протягом якого він відновлює свої замикаючі властивості і до нього знову можна прикласти максимум пряме напругу. Сучасні тиристори мають часи відновлення приблизно від десяти мікросекунд (для високо -частотних тиристорів) до двохсот мікросекунд (для низькочастотних тиристорів);
- заряд відновлення тиристора Qв, повний заряд (накопичений в вентиля при проходженні прямого струму), витікаючий з вентиля при переході його зі стану провідності прямого струму в стан появи на вентилі зворотного напруги;
-
амплітуда зворотного струму вентиля
Ibmax, обумовленого висновком заряду
відновлення Qв з вентиля в момент спаду
до нуля прямого струму вентиля (при
виключенні) з певною швидкістю di/dt:
- гранична швидкість наростання прямої напруги на вентилі, при перевищенні якої можливе включення тиристора в прямому напрямку навіть при відсутності управління з-за появи сигналу-перешкоди в ланцюзі його керуючого електрода,?протікаючого? через паразитне ємність між ним і анодом тиристора.
Зазвичай ця швидкість обмежена від ста до тисячі вольт в микросекунду для різних типів тиристорів;
- гранична швидкість наростання прямого струму тиристора при його включенні, пов'язана з неоднорідним розподілом струму по площі p-n переходу тиристора, що може призвести до локального пошкодження (розтринькуванні) p-n переходу. Зазвичай ця величина обмежується виробником на рівні від декількох десятків до декількох сотень ампер в микросекунду;
- гранична частота імпульсів прямого струму вентиля, до якої вентиль може працювати без зниження допустимого середнього значення анодного струму. Для низькочастотних тиристорів і діодів ця величина дорівнює 400 Гц, для високочастотних? до 10 20 кГц;
- час включення tвкл і час вимкнення tвыкл напівпровідникового вентиля характеризують відповідно час переходу вентиля з вимкненого стану під включене і з включеного стану у вимкненому;
- параметри сигналу керування в ланцюзі керуючого електрода тиристора, що забезпечують його надійне включення: напруга управління Uуэ (кілька вольт), струм управління Іуэ (частки ампера), швидкість наростання струму управління dIуэ/dt (1, 2 А/мксек), мінімальна тривалість імпульсу управління (20? 100 мксек). При цьому потужність сигналу керування в тисячі разів менше потужності, що перемикається тиристори в анодної ланцюга;
- напруга відсічення спрямленной вольт-амперной характеристики вентиля в прямому напрямку ∆U0 і його динамічний опір Rдин. На малюнку показано реальна нелінійна і кусочнолинейная модельна (спрощена) вольт-амперные характеристики вентиля в прямому напрямку. Значення напруги відсічення для кремнієвих вентилів одно близько 1, значення динамічного опору назад пропорційно номінальному середньому значенню анодного струму вентиля Іа і змінюється в діапазоні від часток ома для малопотужних тиристорів до тисячної частки ома для потужних тиристорів, маючи порядок 1/Іа [Ом].