

10.1.3. Принцип комбінованого управління
Аналізуючи й порівнюючи роботу систем, які реалізують обидва розглянуті принципи, можна зробити деякі основні висновки.
1. Принцип управління по збуренню являється більш швидкодіючим по відношенню до контролюємого збурення. Це пояснюється тим, що при правильно вибраному значенні коефіцієнту регулятора kр=k2/k1 при kλ=1) система взагалі не відчуває впливу збурення і залишається в тому ж режимі.
Але цьому принципу є притаманним один суттєвий недолік, який полягає в тому, що при наявності інших (неконтрольованих) збурень (як, наприклад λ1 в розглянутому вище прикладі), величина φ буде змінюватися, а регулятор (kр) не буде впливати на ці зміни, тому що дане збурення ним не контролюється.
Принцип регулювання по відхиленню є більш точним, оскільки зміна величини φ, яка може бути викликана будь-яким збуренням (як тим, що контролюється, так і тим, що не контролюється), призводить до реакції регулятора та зміни управляючого впливу з метою компенсації, виниклих аномалій.
4. З іншого боку, принцип зворотного зв'язку являється більш інерційним порівняно з принципом управління по збуренню. Дійсно, для того, щоб kр змінив μ з метою корегування величини φ, необхідно, щоб система спочатку вийшла із стійкого стану, а вже потім регулятор її поверне в старий (або новий) стійкий стан, що вимагає певних витрат часу на здійснення управління, особливо для інерційних об'єктів.
Звичайно, виникає думка поєднати в одне ціле переваги обох принципів і послабити їх недоліки. Це досягається застосуванням так званого комбінаційного принципу управління, де основні (головні) збурення контролюються й їх вплив компенсується зв'язком по збуренню, а вплив другорядних збурень (які, можливо, мають місце), усувається зворотнім зв'язком. Відмітимо, що для нормального функціонування будь-якої системи зі зворотним зв'язком необхідно, щоб відхилення ε являло собою різницю між заданим Ψ і реальним значенням φ (тобто ε = Ψ - φ), тому зворотній зв'язок в системах управління називають від'ємним зворотнім зв'язком.
Розглянемо більш детально комбінаційну систему, яка має в загальному випадку 2 збурення (контрольоване та неконтрольоване) і один управляючий вплив \х.
Нехай об'єкт управління описується лінійною моделлю виду
![]()
де k1; k2; k3 - коефіцієнти чутливості (або коефіцієнти передачі) вихідної величини до відповідних вхідних.
Т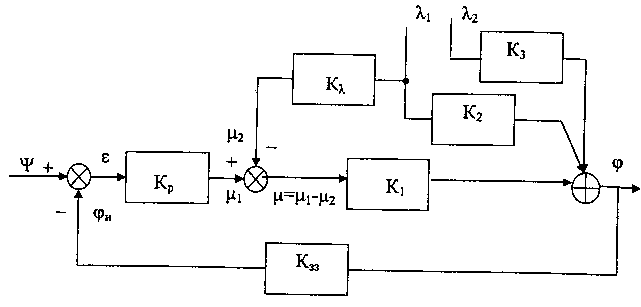 оді
узагальнена структура комбінованої
системи управління може бути представлена
у вигляді рис. 10.4.
оді
узагальнена структура комбінованої
системи управління може бути представлена
у вигляді рис. 10.4.
Рис. 10.4. Узагальнена реалізація комбінованого принципу управління
Для даної системи існують наступні відношення:
![]()
З урахуванням моделі об'єкту маємо:
![]()
звідки:
![]() (10.5)
(10.5)
де k0=kр-k1- kзз - коефіцієнт передачі системи в замкненому стані.
Вибираючи kλ =(k2 /k1),можна забезпечити незалежність φ від збурення, що контролюється (λ1). Вплив же збурення λ2, яке не контролюється, на величину φ завжди має місце. Але його можна послабити за рахунок збільшення kр. Як і в системі, яка реалізує принцип зворотного зв'язку, величина φ визначається лише величиною Ψ, вплив же збурень, що не контролюються → 0 при kр → ∞. При цьому вплив збурень, що контролюються усувається повністю за рахунок відповідного вибору kλ.
Зауважимо, що подібні структури знайшли найбільш широке застосування як у технічних, так і в організаційних системах управління.