

СКЕ_1 / Модуль4. Регулирование ЭДС и положения электропривода
.pdfЖ10.8.3. Графики изменения задания на положение, положения и скорости (п. Ж5.3).
Ж10.8.4. Характеристики переходного процесса изменения скорости
(п. Ж5.4).
Ж10.8.5. Сопоставление результатов расчетов и моделирования.
Ж10.9. Исследование переходных процессов в контуре положения при отработке средних перемещений (выход регулятора скорости ограничен,
Мс = 0).
Ж10.9.1. Расчеты по пунктам Ж6.1-Ж6.2.
Ж10.9.2. Структурная схема модели (рис. Ж-8) с числовыми значениями коэффициентов.
Ж10.9.3. Результаты уточнения величины kрпу и результаты
моделирования в соответствии с пунктом Ж6.5. Ж10.9.4. Расчеты по пунктам Ж6.7, Ж6.8.
Ж10.9.5. Результаты моделирования в соответствии с пунктом Ж6.9. Ж10.9.6. Сравнение расчетных значений tпт с результатами
моделирования.
Ж10.9.7. Сопоставление результатов расчетов и моделирования. Ж10.10. Исследование переходных процессов в контуре положения при
отработке средних перемещений (выход регулятора скорости ограничен,
Мс = Мс1).
Ж10.10.1. Расчеты по пунктам Ж7.1-Ж7.2.
Ж10.10.2. Структурная схема модели (рис. Ж-9) с числовыми значениями коэффициентов.
Ж10.10.3. Результаты уточнения величины kрпу и результаты
моделирования в соответствии с пунктом Ж7.5. Ж10.10.4. Расчеты по пунктам Ж7.7, Ж7.8.
Ж10.10.5. Результаты моделирования в соответствии с пунктом Ж7.9. Ж10.10.6. Сравнение расчетных значений tпт с результатами
моделирования.
Ж10.10.7. Сопоставление результатов расчетов и моделирования.
61
Ж10.11. Исследование переходных процессов в контуре положения при отработке средних и больших перемещений (выход регулятора положения и выход регулятора скорости ограничены, Мс = Мс1).
Ж10.11.1. Расчеты по пунктам Ж8.1-Ж8.4.
Ж10.11.2. Структурная схема модели (рис. Ж-10) с числовыми значениями коэффициентов.
Ж10.11.3. Результаты уточнения величины kрпу и результаты
моделирования в соответствии с пунктом Ж8.7.
Ж10.11.4. Результаты моделирования в соответствии с пунктом Ж8.9. Ж10.11.5. Сравнение расчетных значений tпт с результатами
моделирования.
Ж10.11.6. Сопоставление результатов расчетов и моделирования.
62
12. Методические указания к выполнению курсовой работы «Расчет системы однозонного регулирования скорости (ЭДС) двигателя с подчиненным контуром регулирования тока якоря»
Целью курсовой работы является углубление знаний, полученных на лекциях, лабораторных и практических занятиях, а также подготовка к дипломному проектированию.
В качестве темы курсовой работы избрана система однозонного регулирования скорости (ЭДС) двигателя с подчиненным контуром регулирования тока якоря.
Методические указания содержат практические рекомендации по выполнению задания на проектирование, необходимые справочные материалы, а также требования к содержанию и оформлению курсовой работы.
12.1. Содержание курсовой работы
Курсовая работа состоит из пояснительной записки на 15-20 страницах. Содержание пояснительной записки:
•титульный лист,
•аннотация,
•оглавление,
•расчет и выбор элементов силовой схемы электропривода,
•расчет параметров объекта регулирования,
•синтез структурной схемы электропривода,
•расчет параметров регуляторов,
•структурная схема САР скорости в абсолютных единицах с числовыми значениями коэффициентов,
•перевод структурной схемы электропривода в относительные единицы,
•структурная схема модели САР скорости в относительных единицах с числовыми значениями коэффициентов,
•кривые переходных процессов в контурах регулирования тока и скорости,
•литература.
63
12.2. Задание на курсовую работу
Рассчитать и исследовать переходные процессы в однозонной системе регулирования скорости (ЭДС) двигателя с подчиненным контуром регулирования тока якоря. Варианты исходных данных приведены в приложении 2.
12.3. Расчет и выбор элементов силовой схемы электропривода
Расчет и выбор элементов силовой схемы производится в соответствии с приложением 3 /7/.
12.4. Расчет параметров объекта регулирования
Расчет параметров объекта регулирования осуществляется в соответствием с приложением 4 /7/.
12.5.Синтез структурной схемы электропривода
Вданном разделе необходимо обосновать принятую структурную схему системы управления электропривода, а также определить передаточные функции регуляторов. В частности, надо компенсировать влияние внутренней обратной связи по ЭДС двигателя, оптимизировать контур регулирования тока, обосновать тип передаточной функции регулятора скорости.
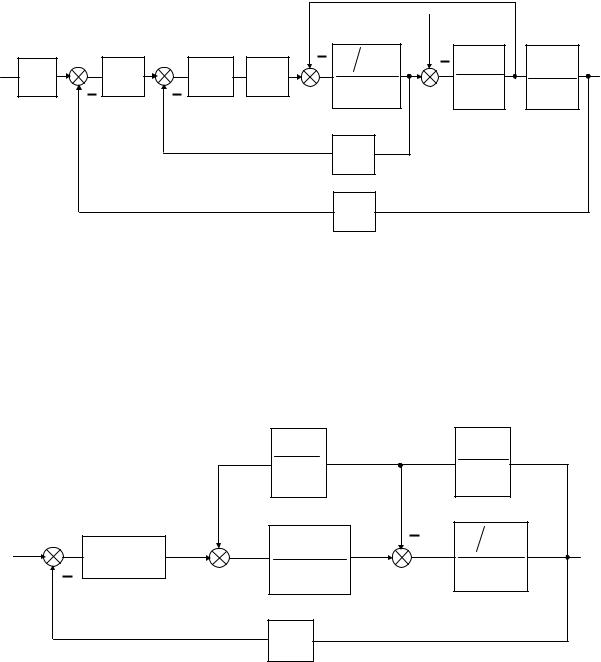
Структурная схема системы автоматического регулирования (САР) скорости показана на рис. 12-1. На рис. 12-1 обозначено:
• Wф - передаточная функция фильтра на входе САР,
• Wрс - передаточная функция регулятора скорости,
• Wрт - передаточная функция регулятора тока,
•Wпр - передаточная функция тиристорного преобразователя,
•Кт - коэффициент передачи цепи обратной связи по току,
•Wс - передаточная функция цепи обратной связи по скорости.
64
U |
U |
U |
|
e |
eдв |
I |
I с |
ω |
зс |
зт |
рт |
d |
1 Rэ |
|
Rэ |
1 |
|
Wф |
Wрс |
Wрт |
Wпр |
|
||||
Tэp+1 |
|
Тмр |
СФн |
|||||
|
|
|
|
|
|
|||
|
U |
|
|
|
|
|
|
|
|
|
ост |
|
|
Kт |
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
|
|
|
|
|
|
|
|
осс |
|
|
|
Wс |
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 12-1. Структурная схема системы однозонного регулирования скорости двигателя с подчиненным контуром регулирования тока якоря
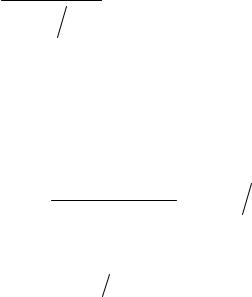
12.5.1. Оптимизация контура регулирования тока якоря
Структурная схема контура тока с ПИ-регулятором изображена на рис.-12-2.
|
|
1 |
eдв |
Rэ |
|
|
Кпр |
|
Тмр |
Uзт |
Uрт |
Кпр |
ed |
I |
|
Wрт( р) |
|
1 Rэ |
|
|
Тµ р+1 |
|
Tэp+1 |
|
|
|
|
||
U |
|
|
|
|
|
ост |
Kт |
|
|
|
|
|
|
|
Рис. 12-2. Структурная схема контура тока с ПИ-регулятором При настройке контура тока на модульный оптимум передаточная
функция регулятора тока:
|
|
|
Т |
р+1 |
|
|
R T |
|
|
T |
э |
р+1 |
|
|
||||
Wрт ( p) =Крт |
ит |
|
р |
= |
|
|
э э |
|
× |
|
|
р . |
|
(12-1) |
||||
Т |
|
К |
пр |
К |
|
Т |
T |
|
|
|||||||||
|
|
|
ит |
|
|
|
|
т т |
|
|
э |
|
|
|
||||
где Т |
=а Т |
- |
постоянная |
|
времени |
контура |
|
тока, с; |
Т |
- |
||||||||
т |
т µ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
µ |
||
некомпенсируемая постоянная времени контура тока, с.
Наличие внутренней обратной связи по ЭДС двигателя вызывает статическую ошибку при регулировании тока в переходных режимах
65
изменения скорости. Установившееся значение тока будет меньше заданного в
1 +Тт  Тм раз. Введение положительной обратной связи по ЭДС двигателя
Тм раз. Введение положительной обратной связи по ЭДС двигателя
устраняет установившуюся ошибку по току, уменьшает некомпенсируемую постоянную времени:
Тµ' = |
Тµ |
|
. |
(12-2) |
1+Т |
Т |
|||
|
µ |
|
м |
|
Одновременно снижается колебательность процесса нарастания тока. Это позволяет увеличивать коэффициент усиления регулятора тока до тех пор, пока
перерегулирование не достигнет 4.3% (ат' = 2) . В этом случае передаточная
функция регулятора тока: |
|
|
|
|
|
|
р+1 |
|
|
||||||
|
|
|
R T |
|
(1+Tµ Tм ) |
2 |
|
T |
|
|
|||||
W |
( p) = |
|
|
э э |
|
× |
э |
|
|
|
. |
(12-3) |
|||
К |
|
|
T |
|
р |
||||||||||
рт |
|
пр |
К |
т |
2Т |
|
|
|
|
|
|
||||
|
|
|
|
µ |
|
|
|
э |
|
|
|
|
|||
Передаточная функция замкнутого контура регулирования тока:
W |
з |
( р) = |
|
1 Кт |
|
|
. |
|
|
|
р(Тµ' |
р+1)+1 |
(12-4) |
||||
т |
|
ат' Тµ' |
|
|||||
|
|
|
|
|
||||
12.5.2. Оптимизация контура регулирования скорости
Вид передаточной функции регулятора скорости обусловлен требуемым статизмом. Величина статического падения скорости в однократноинтегрирующей системе:
|
|
∆ϑс |
= |
асТ1 |
× |
RэIн |
×100 , |
(12-5) |
||
|
|
Тм |
|
СФωн |
||||||
|
|
|
|
|
|
|||||
где Т |
=а' |
Т' |
+Т |
- при использовании обратной связи по ЭДС двигателя, |
||||||
|
1 |
т |
µ |
|
|
я |
|
|
|
|
1 |
|
т µ |
- при использовании обратной связи по скорости двигателя, с. |
|||||||
с; Т |
=а' Т' |
|
||||||||
Полученное значение сравнивается с заданным: ∆ϑс должно быть меньше ∆ϑсз .
66
Первоначально проверяется возможность использования обратной связи по ЭДС двигателя, затем по скорости. Если однократно-интегрирующая система регулирования не обеспечивает требуемого статизма, применяют двукратно интегрирующую систему регулирования скорости.
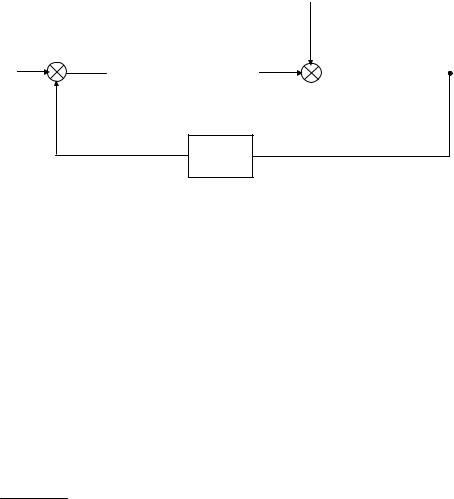
12.5.2.1. Контур регулирования ЭДС с П-регулятором
Структурная схема контура регулирования ЭДС с П-регулятором изображена на рис. 12-4.
Uзэ |
|
|
|
|
|
Uзт |
|
|
|
I |
Ic |
|
|
|
|
eдв |
|||||
|
|
|
|
|
|
|
|
|
Rэ |
|
|||||||||||
|
|
W |
( р) |
|
|
|
|
|
|
|
з |
( р) |
|
|
|
|
|
|
|
||
|
|
|
|
К |
|
|
W |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
фэ |
|
|
|
|
|
рэ |
|
т |
|
|
|
|
|
Т |
р |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
Uосэ
Wс( р)
Рис. 12-4. Структурная схема контура регулирования ЭДС двигателя Коэффициент усиления регулятора ЭДС при настройке контура на
модульный оптимум:
Крэ = |
|
|
|
КтТм |
|
|
|
|
. |
(12-6) |
||
|
' |
' |
+ |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||
|
а |
а |
Т |
R |
|
К |
|
|
|
|||
|
|
э |
т µ |
|
я |
|
э |
|
н |
|
||
Передаточная функция фильтра на входе системы регулирования:
Wфэ( р) = |
1 |
|
. |
(12-7) |
|
Тяр+1 |
|||||
|
|
|
|||
Передаточная функция цепи обратной связи по ЭДС:
Wс( р) = |
Кн |
|
Тяр+1 . |
(12-8) |
67
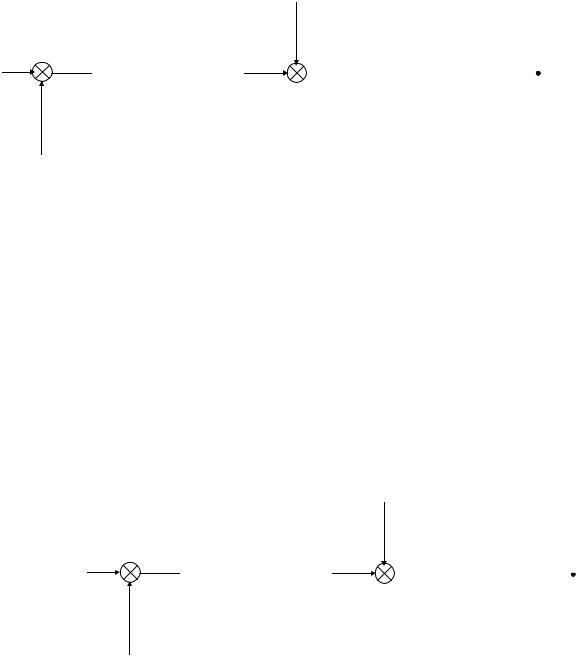
12.5.2.2. Контур регулирования скорости с П-регулятором
Структурная схема контура регулирования скорости с П-регулятором изображена на рис. 12-5.
Uзс |
Uзт |
|
|
|
|
I |
|
|
Ic |
|
|
|
eдв |
|
|
|
ω |
||||||||
|
|
|
|
|
|
|
Rэ |
|
|
1 |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
з |
( р) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
К |
рс |
|
W |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
Т р |
|
|
СФ |
|
|
||||||
|
Uосс |
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
|
н |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
Кс |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис. 12-5. Структурная схема однократно-интегрирующей системы регулирования скорости
Коэффициент усиления регулятора скорости при настройке контура на модульный оптимум:
Крс |
= |
КтТм СФн |
|
. |
(12-9) |
||
а а' Т ' |
R |
К |
|
||||
|
|
с т µ |
э |
|
с |
|
|
12.5.2.3. Контур регулирования скорости с ПИ-регулятором
Структурная схема контура регулирования скорости с ПИ-регулятором приведена на рис. 12-6.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
c |
|
|
|
e |
|
|
ω |
|||||
Uзс |
|
|
|
|
|
|
Uзт |
|
|
I |
|
|
|
|
|
дв |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
Rэ |
|
|
|
1 |
|
|
|
||||||||||
|
|
|
( р) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
W |
|
|
|
W |
( р) |
|
|
W з |
( р) |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
фс |
|
|
|
|
рс |
|
|
т |
|
|
|
|
|
|
Т р |
|
|
С |
Фн |
|
|
|||||
|
|
|
|
|
Uосс |
|
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
Кс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 12-6. Структурная схема двукратно интегрирующей системы регулирования скорости
Передаточная функция ПИ-регулятора скорости при настройке контура на модульный оптимум:
68
|
Тис |
р |
+1 |
|
КтТм СФн |
|
в а а' Т ' |
р +1 |
|
|
|||
|
|
|
|
с с т µ |
|
|
. |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||
Wрс( р) =Крс Т |
|
р |
= |
|
× |
' |
' |
|
(12-10) |
||||
|
' |
' |
|
|
|||||||||
|
ис |
|
|
|
асатТµ RэКс |
|
всасатТµ р |
|
|
||||
Передаточная функция фильтра на входе системы регулирования:
W ( р) |
= |
|
|
1 |
|
|
|
|
|
. |
(12-11) |
|
' |
|
|
' |
|
+1 |
|||||
фс |
|
в а а |
Т |
р |
|
||||||
|
|
с с |
т |
µ |
|
|
|
|
|
||
12.5.3. Составление полной структурной схемы системы регулирования скорости
На основании структурной схемы общего вида (рис. 12-1), указанного в задании регулятора тока, выбранного типа регулятора скорости в разделах 12.5.1, 12.5.2 оптимизированы контуры регулирования тока и скорости. Базируясь на полученных структурных схемах РТ и РС, необходимо преобразовать структурную схему, изображенную на рис. 12-1, в соответствии с принятыми регуляторами и конкретными значениями их настроек.
12.6.Расчет параметров регуляторов
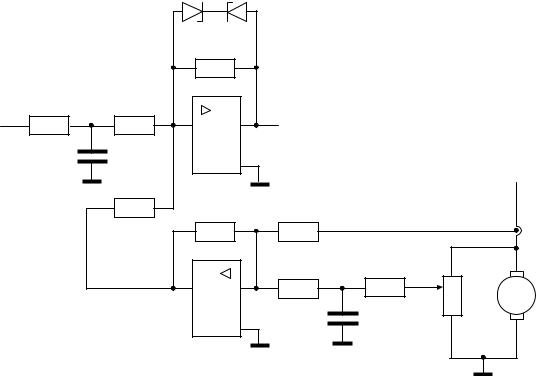
12.6.1.Контур регулирования ЭДС с П-регулятором
|
СТ1 |
Rосэ |
СТ2 |
|
|
|
|
|
|
uзэ 0.5Rзэ 0.5Rзэ |
|
uрт |
|
|
Сзэ |
Rэдс |
РЭ |
|
|
|
|
uш |
||
|
Rдэ |
Rтк |
||
|
|
|||
|
Uосэ |
|
0.5Rн 0.5Rн |
Rд |
|
|
ДЭ |
|
Д |
|
|
Сн |
rд |
|
Рис. 12-7. Принципиальная схема П-регулятора ЭДС
69
Расчетные соотношения для фильтров на входе регулятора и датчика
ЭДС:
Сн |
= |
Сзэ |
= |
4Тя |
= |
4Тя |
. |
(12-12) |
|
||||||||
|
|
Rн |
|
Rзэ |
|
|||
Задавшись Rн=Rзэ =50÷100 кОм, по формуле (12-12) вычисляем
Сн , Сзэ.
Сопротивление цепи обратной связи регулятора ЭДС:
Rосэ=RзэКрэ . |
(12-13) |
Расчетные соотношения для цепи обратной связи по ЭДС: |
|
К |
н |
= |
К |
|
|
К |
Rзэ |
, |
|
(12-14) |
||||
|
|
Rэдс |
|
|||||||||||
|
|
|
|
дэ ддв |
|
|
|
|||||||
Кддв |
= |
rд |
, |
|
|
|
|
(12-15) |
||||||
R |
|
|
|
|||||||||||
|
|
|
|
|
|
|
д |
|
|
|
|
|||
Кдэ= |
Rдэ |
|
|
|
(12-16) |
|||||||||
|
|
|
. |
|
|
|
|
|||||||
|
Rн |
|
|
|
||||||||||
Приняв Rэдс = Rд = Rзэ, |
Кдэ = 0.5, по уравнению |
(12-16) |
||||||||||||
определим Rдэ, по (12-14), (12-15) - rд . |
|
|||||||||||||
Сопротивление цепи токовой компенсации: |
|
|||||||||||||
R |
|
|
= |
|
|
Кш |
× |
Rзэ Rдэ = КшRдэ, |
(12-17) |
|||||
|
|
|
|
|
||||||||||
тк |
|
|
|
КнRэ |
Rэдс |
КнRэ |
|
|||||||
где Кш =Uшн  Iшн - передаточный коэффициент шунта в цепи тока якоря.
Iшн - передаточный коэффициент шунта в цепи тока якоря.
70