

СКЕ_1 / Модуль4. Регулирование ЭДС и положения электропривода
.pdfЖ4.1.2. Для снятия ограничения на ток в подсистеме регулирования |
|||||||||
скорости |
P − speed |
задать верхнее |
и нижнее |
ограничения |
регулятора |
||||
скорости равными 100. |
|
|
|
|
|
|
|
||
Ж4.2. Выбрать время моделирования tм так, чтобы переходные |
|||||||||
процессы практически закончились (пятикратное значение коэффициента при |
|||||||||
p в первой степени в характеристическом уравнении замкнутого |
контура |
||||||||
положения). |
|
|
|
|
|
|
|
|
|
Ж4.3. Выполнить моделирование с выводом на одном графике задания на |
|||||||||
положение, положения и скорости. |
|
|
|
|
|
||||
Ж4.4. Определить характеристики переходной функции положения: |
|||||||||
перерегулирование δ , время первого достижения установившегося значения |
|||||||||
tн, время достижения первого максимума tм1 , время регулирования tр . |
|||||||||
Ж4.5. По кривым i(t) , υ(t) оценить максимальные значения тока и |
|||||||||
скорости, соответствующие настройке контура положения на модульный |
|||||||||
оптимум. |
|
|
|
|
|
|
|
|
|
Ж4.6. Проанализировать полученные результаты, сделать выводы. |
|||||||||
|
Ж5. Исследование переходных процессов в контуре положения |
||||||||
при отработке среднего настроечного перемещения (выход регулятора |
|||||||||
|
|
|
скорости ограничен, Мс = 0) |
|
|
|
|||
Ж5.1. |
Рассчитать |
параметры |
типовых |
блоков |
SIMULINK, |
||||
соответствующих структурной схеме модели, изображенной на рис. Ж-7. |
|||||||||
uзп |
|
uзс |
|
|
i |
|
υ |
ϕ |
|
|
|
kрп |
|
kрс |
|
ρэ |
|
1 |
|
|
|
|
|
|
Т |
р |
|
p |
|
|
|
|
|
|
|
м |
|
|
|
Рис. Ж-7. Структурная схема модели контура положения с ограничением |
|||||||||
задания на ток якоря (контур тока якоря не обладает инерцией, k рс =1000, |
|||||||||
Мс = 0) |
|
|
|
|
|
|
|
|
|
|
|
|
|
51 |
|
|
|
|
|
Задание на перемещение uзп =ϕз. Регулятор скорости должен ограничивать ток при пуске и торможении на уровне imax . Момент нагрузки и статический ток равны нулю µс =iс = 0.
Коэффициент усиления регулятора положения рассчитывается по формуле (Ж-22). Определенное таким образом значение kрп справедливо при следующих допущениях:
•контур регулирования тока якоря не обладает инерцией (Тт = 0);
•коэффициент усиления РС настолько велик, что даже небольшое напряжение на выходе РП насыщает РС.
Для реализации принятых допущений в схеме модели на рис. Ж-7 передаточная функция замкнутого контура тока принята равной единице, коэффициент усиления регулятора скорости k рс =1000.
Ж5.2. Определить:
•время пуска и торможения tпт двигателя по формуле (Ж-23),
•время моделирования
tм = 2tпт. |
(Ж-27) |
Ж5.3. Выполнить моделирование с выводом на одном графике задания на положение, положения, тока и скорости.
Ж5.4. По графикам определить:
•время пуска,
•время торможения.
Ж5.5. Сравнить расчетное значение tпт с результатами моделирования. Ж5.6. Проанализировать полученные результаты, сделать выводы.
Ж6. Исследование переходных процессов в контуре положения при отработке средних перемещений (выход регулятора скорости
ограничен, Мс = 0)
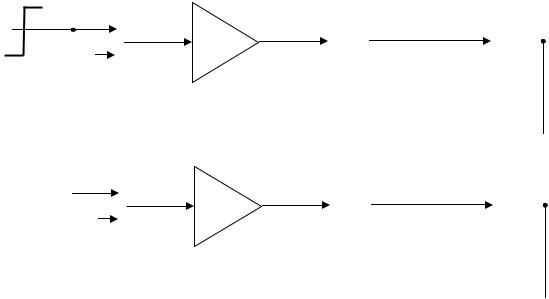
Ж6.1. Рассчитать параметры типовых блоков SIMULINK, соответствующих структурной схеме модели, изображенной на рис. Ж-8.
52
|
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
uзп |
|
|
uзс |
wсо( р) |
υ |
|
|
|
|
|
|
|
ϕ |
|||||||||
|
|
|
|
1 |
|
|
|
||||||||||||||||
|
|
|
|
|
|
kрп |
|
In1 |
Out1 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
In2 Out2 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
P − speed |
|
|
|
|
|
|
|
|
|
|
|
а) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uзс |
wсо( р) |
υ |
|
|
|
|
|
|
ϕ |
||||||||
|
|
|
|
|
|
1 |
|
|
|
||||||||||||||
|
|
|
|
|
|
kрпу |
In1 |
Out1 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
In2 Out2 |
|
|
|
|
|
|
|
|
|
|
б) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
P − speed |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. Ж-8. Структурная схема модели контура положения с ограничением задания на ток якоря ( Мс = 0)
Задание предполагает отработку трех перемещений без статической нагрузки:
•настроечное перемещение, uзп =ϕз,
•перемещение меньше настроечного uзп = 0.5ϕз,
•перемещение больше настроечного uзп = 2ϕз.
Регулятор скорости должен ограничивать ток при пуске и торможении на уровне imax . Момент нагрузки и статический ток равны нулю µс =iс = 0.
Коэффициент усиления регулятора положения kрп рассчитывается по формуле (Ж-22).
Ж6.2. Для перемещения, равного настроечному uзп =ϕз, по формулам (Ж8-23), (Ж8-27) определить время пуска и торможения двигателя, а также время моделирования tм.
Ж6.3. Выполнить моделирование для схемы рис. Ж-8,а (настроечное перемещение, uзп =ϕз) с выводом графиков задания на положение,
положения, скорости.
Поскольку схема модели (рис. Ж-8,а) содержит контур скорости с ограниченным значением коэффициентом усиления регулятора скорости и контур тока, обладающий инерцией, то результаты моделирования будут
53
отличаться от результатов, полученных в разделе Ж5. Из-за несвоевременного выхода регулятора скорости из насыщения позиционирование привода осуществляется с перерегулированием по скорости и положению.
Ж6.4. Для устранения этого явления подобрать коэффициент усиления регулятора положения kрпу таким образом, чтобы скорость в процессе
позиционирования изменялась по треугольному закону.
Ж6.5. Выполнить моделирование для схем рис. Ж-8,а и Ж-8,б (настроечное перемещение, uзп =ϕз). Кривые изменения задания на
положение, положения и скорости (для моделей, изображенных на рис. Ж-8,а и рис. Ж-8,б) вывести на одном графике.
Ж6.6. Создать модель для исследования работы системы позиционирования с уточненным значением kрпу при отработке следующих
перемещений:
•настроечное перемещение uзп =ϕз,
•перемещение меньше настроечного uзп = 0.5ϕз,
•перемещение больше настроечного uзп = 2ϕз.
Ж6.7. По формуле (Ж-23) определить время пуска и торможения двигателя tпт для каждого из отрабатываемых перемещений.
Ж6.8. Время моделирования tм определить по формуле (Ж-27) для случая, когда отрабатывается большее перемещение uзп = 2ϕз.
Ж6.9. Выполнить моделирование для схемы рис. Ж-8,б. Кривые задания на положение, положения, скорости для случаев uзп =ϕз, uзп = 0.5ϕз, uзп = 2ϕз вывести на одном графике.
Ж6.10. По графикам определить время разгона и торможения привода. Ж6.11. Сравнить расчетные значения tпт с результатами
моделирования.
Ж6.12. Проанализировать полученные результаты, сделать выводы.
54
Ж7. Исследование переходных процессов в контуре положения при отработке средних перемещений (выход регулятора скорости ограничен, Мс = Мс1)
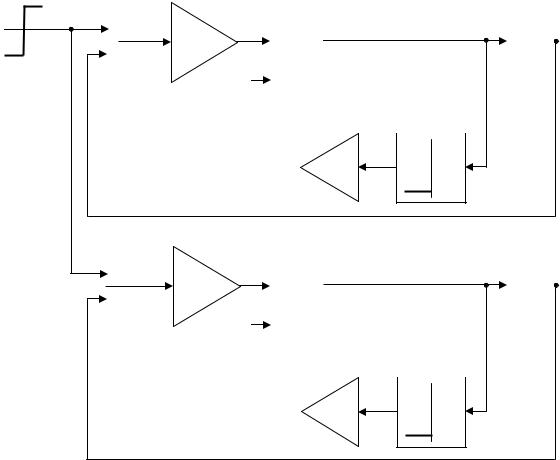
Ж7.1. Рассчитать параметры типовых блоков SIMULINK, соответствующих структурной схеме модели, изображенной на рис. Ж-9.
|
uзп |
|
|
|
|
uзс |
wз |
( р) |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
со |
|
|
|
υ |
1 |
|
ϕ |
||||||||
|
|
|
|
|
|
kрп |
In1 |
Out1 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
||||||
|
|
|
|
|
|
|
|
In2 Out2 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
P − speed |
Signum |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
ic |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а)
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uзс |
wсо( р) |
|
|
υ |
|
|
|
|
||||||
|
|
|
|
1 |
|
|
||||||||||||
|
|
|
|
kрпу |
In1 Out1 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
In2 Out2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
P − speed |
Signum |
|
|
|
|
|||||||
|
|
|
|
|
|
|
ic |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б)
Рис. Ж-9. Структурная схема модели контура положения с ограничением задания на ток якоря
Задание предполагает отработку трех перемещений со статической нагрузкой:
•настроечное перемещение uзп =ϕз,
•перемещение меньше настроечного uзп = 0.5ϕз,
•перемещение больше настроечного uзп = 2ϕз.
Регулятор скорости должен ограничивать ток при пуске и торможении на уровне imax .
Задание на статический ток определяется моментом нагрузки:
55
iс = µс = Мс1 Мн.
Мн.
Коэффициент усиления регулятора положения kрп
формуле (Ж-22) для настроечного перемещения uзп =ϕз.
Задать следующие параметры моделирования (Simulation parameter) в разделе разрешенные опции (Solver option):
•Интегрирование с постоянным шагом (Fixed-step),
•Способ моделирования – ode2(Heun),
•Шаг интегрирования (Fixed step size) – 0.001 с.
Данное решение обусловлено особенностями моделирования момента статической нагрузки.
Ж7.2. Для перемещения, равного настроечному uзп =ϕз, определить:
•время пуска и торможения двигателя по формуле (Ж-23),
•время моделирования по формуле (Ж-27).
Ж7.3. Выполнить моделирование для схемы рис. Ж-9,а (настроечное перемещение, uзп =ϕз) с выводом графиков задания на положение,
положения, скорости.
Из-за ограниченного значения коэффициента усиления регулятора скорости и наличия инерционности в контуре тока позиционирование привода осуществляется с перерегулированием по скорости и положению.
Ж7.4. Для устранения этого явления подобрать коэффициент усиления
регулятора положения kрпу |
таким образом, |
чтобы |
скорость |
в |
процессе |
||
позиционирования изменялась по треугольному закону. |
|
|
|
||||
Ж7.5. |
Выполнить моделирование |
для |
схем |
рис. Ж-9,а |
и Ж-9,б |
||
(настроечное |
перемещение, |
uзп =ϕз). |
Кривые изменения |
задания на |
|||
положение, положения, скорости (для моделей, изображенных на рис. Ж-9,а и рис. Ж-9,б) вывести на одном графике.
Ж7.6. Создать модель для исследования работы системы позиционирования с уточненным значением kрпу при отработке следующих
перемещений:
• настроечное перемещение uзп =ϕз,
• перемещение меньше настроечного uзп = 0.5ϕз,
56
• перемещение больше настроечного uзп = 2ϕз.
Ж7.7. По формуле (Ж-23) определить время пуска и торможения двигателя tпт для каждого из отрабатываемых перемещений.
Ж7.8. Время моделирования tм определить по формуле (Ж-27) для случая, когда отрабатывается большее перемещение uзп = 2ϕз.
Ж7.9. Выполнить моделирование для схемы рис. Ж-9,б. Кривые задания на положение, положения, скорости для случаев uзп =ϕз, uзп = 0.5ϕз, uзп = 2ϕз вывести на одном графике.
Ж7.10. По графикам определить время разгона и торможения привода. Ж7.11.Сравнить расчетные значения tпт с результатами моделирования. Ж7.12. Проанализировать полученные результаты, сделать выводы.
Ж8. Исследование переходных процессов в контуре положения при отработке средних и больших перемещений (выход регулятора положения и выход регулятора скорости ограничены, Мс = Мс1)
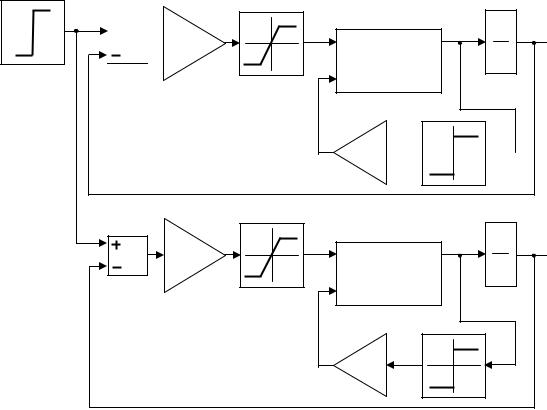
Ж8.1. Рассчитать параметры типовых блоков SIMULINK, соответствующих структурной схеме модели, изображенной на рис. Ж-10.
Регулятор скорости должен ограничивать ток при пуске и торможении на уровне imax . Регулятор положения должен ограничивать задание на скорость на уровне υо =ωо ωб =1. Задание на статический ток определяется моментом нагрузки по формуле (Ж-28).
ωб =1. Задание на статический ток определяется моментом нагрузки по формуле (Ж-28).
Коэффициент усиления регулятора положения kрп рассчитывается по формуле (Ж-24). Угол поворота вала двигателя за время пуска – торможения ϕпт при треугольном графике изменения скорости (ограничение на скорость равно υо) вычисляется по формуле (Ж-25).
Для упрощения расчетов по формулам (Ж-24) - (Ж-26) принять υн =υо.
57
uзп


 kрп
kрп
uзс |
wз |
( р) |
υ |
ϕ |
|
со |
|
|
1 |
|
In1 |
Out1 |
|
|
|
|
p |
||
|
In2 |
Out2 |
|
|
|
|
|
||
|
P − speed |
|
|
|
ic 

а)
uзс |
wз |
( р) |
υ |
ϕ |
kрпу |
со |
|
|
1 |
In1 |
Out1 |
|
||
|
p |
|||
|
In2 |
Out2 |
|
|
|
P − speed |
|
|
|
|
ic |
|
|
б) |
|
|
|
|
|
Рис. Ж-10. Структурная схема модели контура положения с |
||||
ограничением задания на ток якоря и скорость |
|
|
|
|
Задать следующие параметры моделирования (Simulation parameter) в |
||||
разделе разрешенные опции (Solver option): |
|
|
|
|
•Интегрирование с постоянным шагом (Fixed-step),
•Способ моделирования – ode2(Heun),
•Шаг интегрирования (Fixed step size) – 0.001 с.
Данное решение обусловлено особенностями моделирования момента статической нагрузки.
Ж8.2. Исследование переходных процессов должно быть проведено для трех случаев:
•задание на перемещение соответствует треугольному графику изменения скорости uзп =ϕпт,
•задание на перемещение uзп = 0.5ϕпт,
•задание на перемещение uзп = 2ϕпт.
Ж8.3. Для случаев uзп =ϕпт и uзп = 2ϕпт определить:
58
•время пуска и торможения двигателя tпт при треугольном графике скорости (ограничение на скорость равно υо) по выражению (Ж-26),
•время движения с установившейся скоростью
tу = |
uзп −ϕпт |
, |
(Ж-29) |
ωо |
|||
• полное время отработки заданного перемещения |
|
||
tпту =tпт +tу . |
(Ж-30) |
||
Ж8.4. Во всех случаях время моделирования должно быть одинаковым и равным:
tм = 2tпту, |
(Ж-31) |
где tпту соответствует заданию на положение uзп = 2ϕпт.
Ж8.5. Выполнить моделирование для схемы рис. 8-10,а (настроечное перемещение, uзп =ϕпт) с выводом графиков задания на положение,
положения, скорости.
Из-за ограниченного значения коэффициента усиления регулятора скорости и наличия инерционности в контуре тока позиционирование привода осуществляется с перерегулированием по скорости и положению.
Ж8.6. Для устранения этого явления подобрать коэффициент усиления регулятора положения kрпу таким образом, чтобы скорость в процессе
позиционирования изменялась по треугольному закону.
Ж8.7. Выполнить моделирование для схем рис. Ж-10,а и Ж-10,б (настроечное перемещение, uзп =ϕпт). Кривые изменения задания на
положение, положения, скорости (для моделей, изображенных на рис. Ж-10,а и рис. Ж-10,б) вывести на одном графике.
Ж8.8. Создать модель для исследования работы системы позиционирования с уточненным значением kрпу при отработке следующих
перемещений:
•uзп =ϕпт,
•uзп = 0.5ϕпт,
•uзп = 2ϕпт.
59
Ж8.9. Выполнить моделирование для схемы рис. Ж-10,б. Кривые задания на положение, положения, скорости для случаев uзп =ϕз, uзп = 0.5ϕз, uзп = 2ϕз вывести на одном графике.
Ж8.10. По графикам определить время разгона и торможения привода. Ж8.11.Сравнить расчетные и экспериментальные значения tпт, tу.
Ж8.12. Проанализировать полученные результаты, сделать выводы.
Ж10. Содержание отчета
Ж10.1. Наименование и цель работы.
Ж10.2. Принципиальная схема контура регулирования (рис. Ж-1). Ж10.3. Расчет передаточных функций элементов системы регулирования. Ж10.4. Структурная схема контура регулирования в абсолютных
единицах (рис. Ж-2) с числовыми значениями коэффициентов.
Ж10.5. Приведение элементов структурной схемы к системе относительных единиц.
Ж10.6. Структурная схема контура регулирования в относительных единицах (рис. Ж-3) с числовыми значениями коэффициентов.
Ж10.7. Исследование переходных процессов в контуре положения при отработке малых перемещений.
Ж10.7.1. Расчеты по пунктам Ж4.1-Ж4.2.
Ж10.7.2. Структурная схема модели (рис. Ж-4, Ж-5) с числовыми значениями коэффициентов.
Ж10.7.3. Графики изменения задания на положение, положения, тока и скорости.
Ж10.7.4. Максимальные значения тока и скорости, соответствующие настройке контура положения на модульный оптимум.
Ж10.7.5. Сопоставление результатов расчетов и моделирования.
Ж10.8. Исследование переходных процессов в контуре положения при отработке среднего настроечного перемещения (выход регулятора скорости ограничен, Мс = 0).
Ж10.8.1. Расчеты по пунктам Ж5.1-Ж5.2.
Ж10.8.2. Структурная схема модели (рис. Ж8-7) с числовыми значениями коэффициентов.
60