

СКЕ_1 / Модуль3. Регулирование скорости электропривода
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ НАЦИОНАЛЬНАЯ МЕТАЛЛУРГИЧЕСКАЯ АКАДЕМИЯ УКРАИНЫ
В.Б. Зворыкин
СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ
МОДУЛЬ 3. РЕГУЛИРОВАНИЕ СКОРОСТИ ЭЛЕКТРОПРИВОДА
Утверждено на заседании Ученого совета академии в качестве учебного пособия
Днепропетровск НМетАУ 2008
УДК 681.51
Зворыкин В.Б. Системы управления электроприводами. Модуль 3: Регулирование скорости электропривода. Учеб. пособие. - Днепропетровск:
НМетАУ, 2008.- 47 с.
Рассмотрены принципы построения систем регулирования скорости с обратной связью по скорости. Определены передаточные функции и параметры регуляторов для однократно- и двукратноинтегрирующих систем регулирования.
Исследована работа систем регулирования скорости в различных режимах отработки задания и изменения нагрузки.
Предложены лабораторные работы по исследованию переходных процессов в одно- и двукратноинтегрирующих системах регулирования скорости с обратной связью по скорости.
Материал пособия отражает содержание модуля «Регулирование скорости электропривода» выборочной дисциплины «Системы управления электроприводами», входящей в программу подготовки бакалавров (очной и заочной форм обучения) по направлению 0925 – автоматизация и компьютерно-интегрированные технологии.
Издается в авторской редакции.
Ответственный за выпуск |
А.П. Егоров, канд. техн. наук, доцент |
Рецензенты: |
Н.Н. Казачковский, канд. техн. наук, профессор |
|
(Национальный горный университет Украины) |
|
В.Г. Акуловский, канд. техн. наук, доцент |
|
(Академия таможенной службы Украины) |
|
© Национальная металлургическая |
|
академия Украины, 2008 |
2
Введение
Настоящее учебное пособие отражает содержание третьего модуля дисциплины «Системы управления электроприводами»:
•модуль 1 – «Электропривод постоянного тока как объект управления»,
•модуль 2 – «Системы подчиненного управления»,
•модуль 3 – «Регулирование скорости электропривода»,
•модуль 4 – «Регулирование ЭДС и положения электропривода»,
• модуль 5 – курсовая работа «Расчет системы однозонного регулирования скорости (ЭДС) двигателя с подчиненным контуром регулирования тока якоря»
Учебное пособие посвящено вопросам регулирования скорости. Рассмотрены одно- и двукратно интегрирующие системы регулирования
скорости. Определены передаточные функции и параметры П- и ПИрегуляторов при условии настройки контуров регулирования на модульный оптимум. Показана необходимость ограничения выходного напряжения регуляторов скорости.
Рассчитаны ошибки регулирования скорости в установившемся режиме и в режиме изменения скорости по линейному закону.
Исследованы переходные процессы в различных режимах изменения задания и нагрузки.
В последней части пособия представлен лабораторный практикум. При его выполнении студентам предлагается исследовать поведение систем регулирования скорости с помощью пакета моделирования динамических систем MATLAB / SIMULINK.
3
7. Регулирование скорости вращения двигателя
Составными частями контура регулирования скорости электродвигателя являются регулятор скорости (РС) и объект регулирования, в который входят оптимизированный контур тока якоря, механическая часть электропривода и датчик скорости.
Однократно интегрирующие системы регулирования применяют при отсутствии жестких требований к точности поддержания скорости, например для большинства механизмов прокатных станов, а также в случаях, когда электропривод работает под отсечку. При работе под отсечку регулятор скорости вступает в действие лишь тогда, когда заданное и фактическое значения скорости становятся близкими по величине. При этом в случае применения двукратно интегрирующей системы регулирования скорости возникает нежелательное перерегулирование по скорости, обусловленное ПИхарактеристикой регулятора.
Двукратно интегрирующие системы регулирования применяют при жестких требованиях к точности поддержания скорости при изменении нагрузки, например для электроприводов чистовых клетей непрерывных станов горячей прокатки, а также при необходимости контроля величины ускорения электропривода.
Регулятор скорости имеет П или ПИ характеристику. В зависимости от этого системы обладают астатизмом первого или второго порядка (одно- и двукратно интегрирующие системы).
7.1. Однократно интегрирующая система
Применяется в тех случаях, когда определяющим является режим отработки возмущения по заданию (САР получается проще). Принципиальная схема системы изображена на рис. 7.1, структурная схема – на рис. 7.2.
Выходное напряжение регулятора скорости поступает на вход ПИрегулятора тока, задавая величину тока двигателя. Выход РТ воздействует на СИФУ преобразователя, обеспечивая подъем выпрямленного напряжения в соответствии с заданием на скорость.
Отбрасывая член TµTтp2 в передаточной функции замкнутого контура тока, получим:
4

|
|
СТ1 СТ2 |
|
|
Тр |
uзc |
|
Rосс |
Rост Сост |
|
ТП1 |
|
|
|
СИФУ |
||
|
Rзс |
Rзт |
|
||
|
|
"В" |
|
||
|
ЗИ |
|
|
|
|
|
РС |
РT |
СИФУ |
|
|
|
|
|
|||
|
|
Rс |
Rт |
"H" |
ТП2 |
|
|
|
|
ДТ |
|
|
|
|
ТГ |
|
Д |
Рис. 7.1. Принципиальная схема реверсивного электропривода с однократно интегрирующей системой регулирования скорости
|
|
uзс |
|
|
|
|
uзт |
|
|
|
|
|
i iс |
|
|
|
|
ω |
|||||||||
|
|
|
|
|
|
|
1 |
Кт |
|
|
|
Rэ |
|
||||||||||||||
|
|
|
|
|
|
|
|
Wрс |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
Ттр(Тµ р +1) |
+1 |
|
|
|
|
|
|
ТмСФр |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
uосс |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Kc |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Рис. 7.2. Структурная схема контура регулирования скорости |
|||||||||||||||||||||||||||
W |
з |
( p) = |
|
|
1/ Kт |
|
. |
|
|
|
|
|
|
|
|
|
|
(7-1) |
|||||||||
|
|
Tтp + |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
т |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Передаточная функция регулятора скорости определится из равенства:
|
|
|
1 |
|
|
|
|
Rэ |
|
|
1 |
|
|
Wрс ( p) |
K (T p +1) |
×T СФ р |
Кс = |
а Т р (Т р +1) . |
(7-2) |
||||||||
|
т |
т |
|
м |
|
|
|
с т |
т |
|
|||
Wрс ( p) = Kрс |
= |
KтTмCФ |
|
. |
|
|
|
(7-3) |
|||||
a T R |
K |
|
|
|
|
|
|||||||
|
|
|
|
с т |
э |
|
с |
|
|
|
|
||
На практике при выборе ас надо учитывать постоянную времени на
выходе датчика скорости.
В соответствии с уравнением (7-2) передаточная функция разомкнутого оптимизированного контура скорости:
5
W р |
( p) = |
uосс( p) |
= |
1 |
. |
(7-4) |
|
uзс( p) |
aсTтp(Tтp +1) |
||||||
с |
|
|
|
|
Учитывая, что коэффициент цепи обратной связи по скорости не равен единице, получим:
W р( p) = |
ω( p) |
= |
|
1/ Kс |
|
|
. |
|
|
(7-5) |
||
uзс( p) |
|
|
|
|
||||||||
с |
|
|
aсTтp(Tтp +1) |
|
|
|||||||
Передаточная функция замкнутого контура скорости: |
|
|
||||||||||
з |
|
ω( р) |
|
|
|
Wср( p) |
|
|
1/ Kс |
|
, |
|
Wс ( р) = uзс( р) |
= 1+ KсWср( p) |
= aсTтp(Tтp +1) +1 |
|
(7-6) |
||||||||
где aсTт =Tс – некомпенсируемая постоянная времени контура скорости.
Если требуется высокое быстродействие и этому не препятствует ограничение по производной тока, то контур скорости настраивают на модульный оптимум ( aс = 2). Для уменьшения колебаний принимают aс > 2.
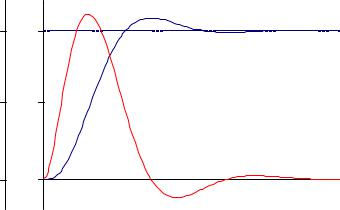
На рис. 7.3 показаны переходные процессы в контурах тока и скорости.
i |
ω ω |
|
16 |
1.0 |
з |
|
|
ω |
8 |
0.5 |
i |
|
|
|
0 |
0.0 |
t |
|
|
|
Рис. 7.3. Пуск двигателя без ограничения выхода П-регулятора скорости Так как контур тока представляет собой колебательное звено, настроенное на модульный оптимум, то перерегулирование скорости при пуске возрастает до 8%. Ток в переходном режиме достигает 16-ти кратного значения от номинального. Это недопустимо как по условиям коммутации электрических машин, так и по возможности реализации тиристорного преобразователя,
обеспечивающего данный ток.
Для большинства машин постоянного тока ток перегрузки не должен превышать (2 ÷3)Iн. Величина тока при пуске (реверсе) определяется уровнем
ограничения РС. Ограничение выполняется либо стабилитронами, либо источником опорного напряжения. Так как при этом регламентируется полный
6
ток, то динамический ток, а, следовательно, ускорение и замедление привода
зависят от статического момента. |
|
|
|
|
||
|
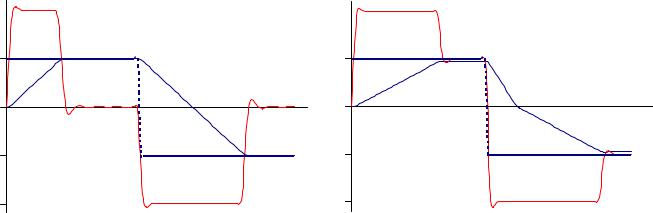
На рис. 7.4 и 7.5 изображены кривые тока и скорости двигателя при пуске |
|||||
и реверсе. |
|
|
|
|
|
|
о.е. |
ωз |
|
|
о.е. |
ωз |
|
1 |
|
|
1 |
|
||
0 |
i |
ω |
|
0 |
i |
ω |
|
ωз |
t |
|
t |
||
|
|
|
|
|||
-1 |
|
|
-1 |
|
ωз |
|
|
|
|
|
|
||
-2 |
|
i |
|
-2 |
|
i |
|
|
|
|
|
||
Рис. 7.4. Пуск и реверс двигателя с |
Рис. 7.5. Пуск и реверс двигателя с |
|||||
ограничением выхода П-регулятора |
ограничением выхода П-регулятора |
|||||
скорости ( Mc = 0, Iогр = 2Iн) |
|
скорости ( Мс = Мн, Iогр = 2Iн) |
||||
Насыщение |
РС соответствует заданию на двойной |
номинальный ток |
(uзт=2KтIн). |
Задание скорости осуществляется |
скачкообразным |
изменением uзс. Поскольку разгон двигателя осуществляется под отсечку, то
по завершении переходного процесса нарастания тока, последний поддерживается на уровне 2Iн. В течение большей части пуска (реверса) ток и
динамический момент неизменны, поэтому скорость двигателя меняется линейно.
При наличии нагрузки ( Mс≠0) характер процессов меняется (рис. 7.5).
Так как ускорение привода определяется динамическим током, то пуск протекает более медленно: ε р = (i −iс) / J , а торможение – более быстро
εт =(i +iс) / J .
В начале пуска и при переходе скорости через ноль в момент реверса якорь двигателя неподвижен до тех пор, пока ток (момент) не превысит статического. Так как регулятор скорости пропорциональный, в установившемся режиме возникает статическая ошибка по скорости (рис. 7.5).
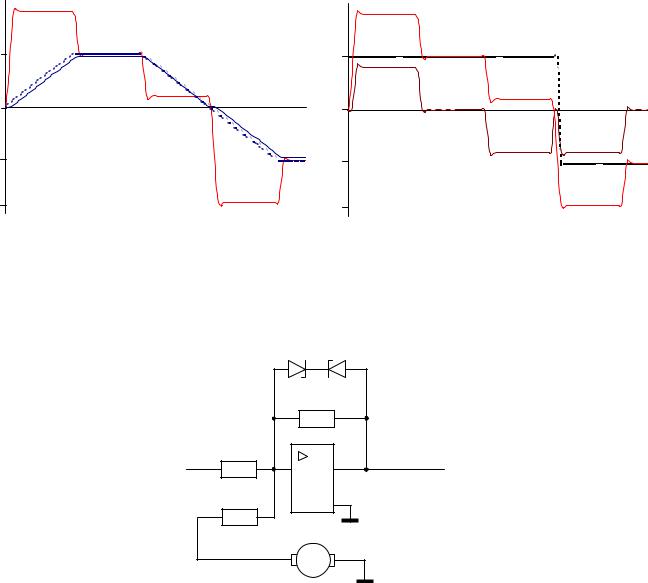
Если необходимо поддержать неизменный темп разгона и торможения, применяют задатчик интенсивности (рис. 7.1). В процессе пуска (реверса) система регулирования поддерживает постоянный динамический ток (рис. 7.6,б), величина которого определяется темпом изменения напряжения
7
|
ЗИ. Тем самым обеспечивается независимость ускорения привода в переходных |
|||||||
|
режимах изменения скорости. |
|
|
|
|
|
|
|
|
|
При пуске от ЗИ, так же как и в установившемся режиме, возникает |
||||||
|
ошибка по скорости в переходном режиме ее изменения (рис. 7.6,а). |
|
|
|||||
о.е. |
i |
|
о.е. |
i |
|
|
|
|
|
|
iс |
|
|
|
|||
1 |
|
ωз |
|
1 |
|
|
|
|
|
|
iд |
|
|
|
|||
|
|
|
|
i |
|
|
||
0 |
|
|
|
0 |
|
|
||
|
ω |
t |
|
iд |
iд |
t |
||
|
|
|
|
|||||
-1 |
|
ωз |
|
-1 |
|
|||
|
|
|
|
|
|
|||
-2 |
|
i |
|
-2 |
|
|
i |
|
Рис. 7.6,а. Пуск и реверс двигателя от |
|
|
|
|
||||
|
Рис. 7.6,б. Пуск и реверс двигателя от |
|||||||
|
ЗИ (П-регулятор скорости не |
ЗИ (П-регулятор скорости не насыщен, |
||||||
|
насыщен, Мс = Мн) |
|
Мс = Мн) |
|
|
|
||
|
|
7.2. Расчет параметров П-регулятора скорости |
|
|
|
|||
СТ1
uзс Rзс
uосс Rс
Rосс СТ2
u рс = uзт
РС
ТГ
Рис. 7.7. Принципиальная схема П-регулятора скорости Коэффициент усиления РС (рис. 7-7):
K рс = |
Rосс |
= |
KтTмCФ |
. |
(7-7) |
||
R |
зс |
a T R K |
с |
||||
|
|
|
с т э |
|
|
||
В установившемся режиме напряжение задания на скорость уравновешивается напряжением обратной связи (в пренебрежении статической ошибкой контура регулирования скорости):
u |
зстах |
=u |
осстах |
= K ω |
, |
(7-8) |
|
|
с тах |
|
8

откуда
|
uзс |
|
|
|
|
Kс = |
тах . |
|
(7-9) |
||
ωтах |
|
|
|
||
Задавшись u |
зс |
= 5 ÷15 |
В, R = 50 ÷100 кОм, по выражениям |
||
|
|
|
зс |
||
|
|
|
тах |
|
|
(7-7), (7-9) рассчитывают Rocc.
Коэффициент передачи цепи обратной связи по скорости:
Кc = Ктг RRзсс ,
где Kтг = ωuтгнтгн - коэффициент передачи тахогенератора.
Из выражения (7-10) определим Rc:
Rc = KтгRзс . Kс
7.3. Установившаяся ошибка по скорости в однократно интегрирующей системе
7.3.1. Установившийся режим вращения двигателя со статической нагрузкой
(7-10)
(7-11)
Установившаяся ошибка по скорости (рис. 7.9) определяется рассогласованием, образующимся на входе П-регулятора скорости для обеспечения требуемого тока двигателя.
о.е. ω,ω |
е |
i |
|
ω |
|
|
1.0 |
|
|
∆ |
|
||
|
|
|
ωе |
|
|
|
|
|
ω |
|
ω |
||
|
ic |
iе |
|
∆ |
е |
|
0.5 |
|
|
|
|||
0.0 |
|
|
|
|
|
t |
|
|
|
|
|
|
|
Рис. 7.9. Наброс нагрузки при работе двигателя с номинальной скоростью
( Мс = Мн)
9

Передаточная функция системы регулирования скорости (рис. 7.2) по возмущению:
ω(p) |
|
|
|
|
|
|
|
Rэ |
|
|
|
|
|
|
|
|
R |
а |
Т |
|
р(Т |
|
р+1 ) |
|
||||||
|
|
|
|
Т |
|
|
СФр |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
= |
|
|
|
|
м |
|
|
|
|
|
= |
|
э с |
|
т |
|
|
т |
. (7-12) |
||||||
|
|
i(p) |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т СФ р |
асТт |
р( |
р+1 ) +1 |
|
||||||||
|
|
|
|
|
1+ |
а Т |
|
р(Т |
|
р+1 ) |
|
|
|
|
м |
|
|
Тт |
|
|||||||||||
|
|
|
|
|
|
|
|
с |
|
т |
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
В установившемся режиме передаточная функция по возмущению примет |
||||||||||||||||||||||||||||||
вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
ω(0) |
= |
RэасТт |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(7-13) |
||||||||
|
|
i(0) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
ТмСФ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Учитывая, что |
|
|
|
|
Rэ |
|
|
= |
1 |
, из формулы (7-13) получим выражение |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
Т мС2 |
Ф2 |
|
J |
|
|
|
|
|
|
|
|
|
|||||||||
для ошибки по скорости в однократно интегрирующей системе регулирования скорости:
ω = |
RэасТт |
i |
c |
= |
RэасТт |
М |
с |
= Мса Т |
т |
. |
(7-14) |
|||
|
|
|||||||||||||
∆ |
ТмСФ |
|
|
2 |
2 |
|
J |
с |
|
|
||||
|
|
|
Т С Ф |
|
|
|
|
|
|
|
||||
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
Естественный статизм привода определится из уравнения электрического равновесия для якорной цепи (отрицательные обратные связи по скорости и току разомкнуты):
e = е |
+i |
R |
э |
|
= СФω |
+i |
|
R . |
|
|
(7-15) |
||||||||||
d |
дв |
|
|
с |
|
|
|
|
|
|
с |
э |
|
|
|
||||||
Из уравнения (7-15) выразим ω: |
|
|
|
||||||||||||||||||
ω = |
ed |
|
− |
iс Rэ |
= |
ωо |
− |
|
ω |
е |
. |
|
|
|
(7-16) |
||||||
|
СФ |
|
|
СФ |
|
|
|
∆ |
|
|
|
|
|
|
|||||||
Статическая ошибка по скорости для разомкнутой системы |
|||||||||||||||||||||
регулирования: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ω |
= |
Rэ |
i |
= |
|
Rэ |
М |
с |
= |
Мс |
Т |
м |
. |
(7-17) |
|||||||
|
С2Ф2 |
|
|||||||||||||||||||
∆ е |
|
СФ с |
|
|
|
|
|
|
J |
|
|
||||||||||
Сопоставление выражений (7-14) и (7-17) показывает, что при переходе от разомкнутой системы регулирования скорости к однократно интегрирующей системе регулирования статическая ошибка по скорости уменьшается в
Тм/(ас ×Тт) раз.
10