

СКЕ_1 / Модуль3. Регулирование скорости электропривода
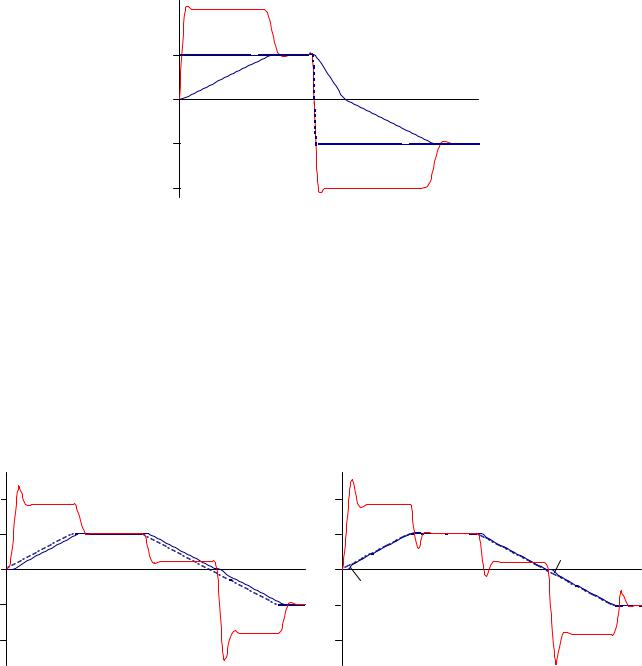
.pdf7.3.2. Переходный режим изменения скорости по линейному закону |
|||
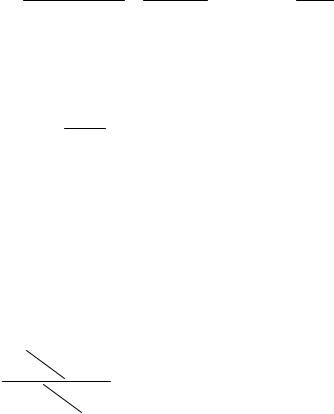
Ошибка по скорости (рис. 7.10) обусловлена действием двух факторов: |
|||
момента нагрузки и внутренней обратной связи по ЭДС двигателя. |
|||
ω |
i |
i |
|
0.4 |
2 |
|
|
|
∆ω |
||
|
iс |
ωз |
|
0.2 |
|
||
1 |
|
|
|
|
iд |
ω |
|
|
|
|
|
0.0 |
0 |
|
t |
|
|
|
|
Рис. 7.10. Пуск двигателя от ЗИ (П-регулятор скорости, Мс = Мн) |
|||
В схеме с ЗИ, где динамический ток поддерживается на уровне, соответствующем заданному темпу изменения скорости, рассогласование на входе регулятора тока создается за счет увеличения задающего сигнала, т.е. рассогласования на входе регулятора скорости.
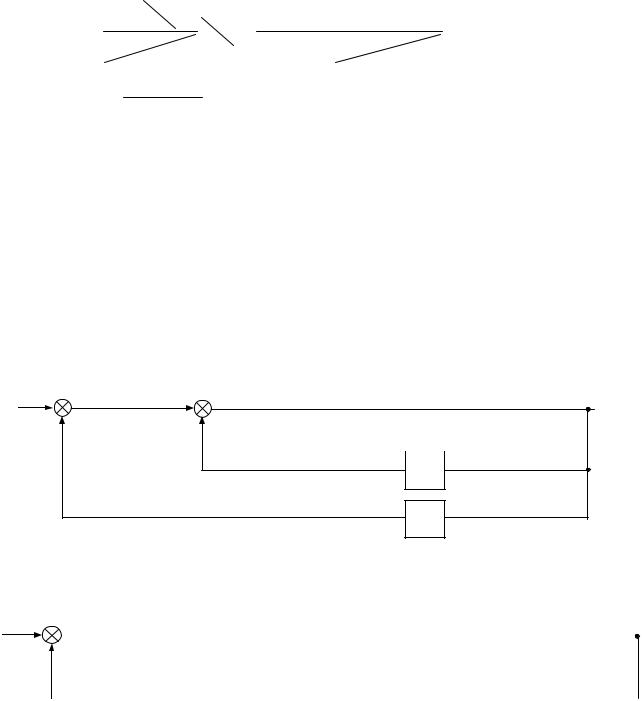
Определим ошибку по скорости при линейно нарастающем сигнале задания, поступающим от задатчика интенсивности. Структурная схема контура скорости, в предположении, что преобразователь не обладает инерцией, изображена на рис. 7.11.
uзс uзи |
uзт |
u рт еd |
1 Rэ |
i iс едв |
ω |
|
ЗИ |
Крс |
Wрт Кпр |
Rэ |
1 |
||
|
|
uост |
|
∆е Тэр+1 |
Тмр СФ |
|
|
|
Kт |
|
|
|
|
uосс
Kc
Рис. 7.11. Структурная схема однократно интегрирующей САР скорости В соответствии со структурной схемой (рис. 7-11) можно записать:
e |
= (i −i |
) |
|
Rэ |
= i |
|
Rэ |
. |
(7-18) |
||
|
|
|
|
||||||||
дв |
|
c |
Т |
|
р |
д |
Т |
|
р |
|
|
|
|
|
м |
|
|
м |
|
|
|
||
Производная ЭДС двигателя:
11
рeдв = iд |
Rэ |
. |
(7-19) |
||||
Т |
|||||||
|
|
|
|
м |
|
|
|
Производная ЭДС преобразователя: |
|
||||||
рu |
рт |
= |
1 |
|
рe . |
(7-20) |
|
Кпр |
|
||||||
|
|
|
d |
|
|||
В процессе разгона двигателя по линейному закону ЭДС преобразователя отличается от ЭДС двигателя на постоянную величину ∆е, значение которой
зависит от ускорения привода и статической нагрузки:
e |
= е |
+ е. |
(7-21) |
d |
дв |
∆ |
|
Производная ЭДС преобразователя:
рed = р(едв + ∆е) = редв . (7-22)
Производная напряжения на входе преобразователя:
рu |
рт |
= |
1 |
рe |
= |
1 |
ре |
= |
|
Rэ |
i . |
|||
К |
|
К |
|
К |
|
|||||||||
|
|
пр |
d |
|
пр |
дв |
пр |
Т |
д |
|||||
|
|
|
|
|
|
|
|
|
|
м |
|
|||
Учитывая, что передаточная функция регулятора тока
Wрт(р)= КпрRКэТтэТт ×ТэТэрр+1 = Крт + Ти1 р,
определим темп изменения выходного сигнала регулятора установившемся режиме по току (uзт = const, uocт = const ):
uрт = Крт + Ти1р (uзт −uост).
Продифференцируем уравнение (7-25):
(7-23)
(7-24)
тока в
(7-25)
рuрт |
= |
|
1 |
( |
|
|
− |
uост |
)= |
Кт |
[ |
−( |
|
± |
iс |
)]. |
|
(7-26) |
||||||||
Т |
|
|
|
|
|
|
||||||||||||||||||||
|
|
uзт |
|
|
Т |
iзт |
|
iд |
|
|
|
|
|
|||||||||||||
|
|
|
и |
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|||
Знак «+» соответствует режиму разгона, знак « |
|
» - режиму торможения. |
||||||||||||||||||||||||
Поскольку Т |
и |
= |
Кпр КтТт |
, получим: |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
Rэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
рuрт = |
|
|
|
|
Кт Rэ |
|
|
|
|
|
|
= |
|
Rэ |
|
|
|
|
. |
(7-27) |
||||||
К |
|
|
К |
|
Т |
|
|
|
|
К |
|
|
|
|
||||||||||||
пр |
т |
т |
iзт−(iд±iс) |
|
Т |
|
|
iзт−(iд±iс) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пр т |
|
|
|
|
|||||||
Приравняем правые части уравнений (7-23) и (7-27):
12
Rэ |
iд = |
Rэ |
. |
|
КпрТм |
КпрТт |
iзт−(iд±iс) |
||
|
|
|
||
ТТтм iд = iзт −(iд±iс),
Разрешим уравнение (7-29) относительно iзт:
i |
|
= i |
|
|
Тт |
|
±i . |
|
зт |
1 |
+ |
|
|||||
Тм |
||||||||
|
д |
|
|
|
с |
(7-28)
(7-29)
(7-30)
Таким образом, из-за влияния внутренней обратной связи по ЭДС двигателя динамическая составляющая тока якоря возрастает в 1+Тт/Тм раз.
Выходное напряжение РС: |
|
|
|
|
|
|
|
|
|
|
Тт |
|
|
|
|
uрс = uзт = Kтiзт = Kт iд 1 |
+ |
|
±iс . |
(7-31) |
|||
Тм |
|||||||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Данное напряжение обеспечивается за счет рассогласования на входе П- регулятора скорости (ошибки по скорости ∆ω):
uрс = Крс (uзи −uосс)= аКтТмСФ (ωз −ω) Кс =
сТт Rэ Кс
КтТмСФ
=асТт Rэ ∆ω .
Приравняв правые части уравнений (7-32) и (7-31), определим
КтТмСФ |
|
|
|
Т |
т |
|
|
||
а Т |
R |
|
∆ω = Кт iд 1 |
+ |
Т |
|
±iс . |
||
с т |
|
э |
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|||
(7-32)
∆ω:
(7-33)
∆ω = aсTтRэ iд 1+ Тт ТмСФ Тм
|
асТт |
|
|
|
Тт |
|
= |
|
Мд 1 |
+ |
|||
|
||||||
|
J |
|
|
Тм |
||
|
|
|
|
|
|
|
|
|
|
асТтRэ |
|
|
|||
|
±iс |
= |
|
Мд |
||||
2 2 |
||||||||
|
|
|
Т |
м |
С Ф |
|
|
|
|
|
|
|
|
|
|
||
± Мс .
|
|
Тт |
|
|
|
1 |
+ |
|
|
± Мс |
= |
|
|||||
|
|
Тм |
|
|
|
|
|
|
|
|
|
(7-34)
При отсутствии статической нагрузки установившаяся ошибка по скорости:
13

|
aсTт |
|
|
|
|
Тт |
|
|
|
ω = |
М |
д |
1 |
+ |
. |
(7-35) |
|||
|
Тм |
||||||||
∆ |
J |
|
|
|
|
||||
Составляющая установившейся ошибки по скорости, обусловленная влиянием ЭДС двигателя:
|
|
|
a T |
|
T |
a T 2 |
|
|
|
|||
∆ω |
э |
= |
с т |
M |
|
т |
= |
с т |
M |
д |
. |
(7-36) |
|
|
|
||||||||||
|
|
J |
д Tм |
JTм |
|
|
||||||
При |
Мс = Мд установившаяся ошибка по скорости |
в режиме |
||||||||||
торможения согласно (7-34):
|
a T 2 |
|
|
|
|
∆ω = |
с т |
M |
д |
. |
(7-37) |
|
|||||
|
JTм |
|
так как процесс торможения при Мс = Мд протекает с |
||
Это естественно, |
|||||
нулевым током, вследствие чего установившаяся ошибка по скорости в этом случае обусловлена только влиянием ЭДС двигателя.
7.4. Двукратно интегрирующая система
Применяется для электроприводов, работающих в режиме стабилизации скорости вращения, когда требуется нулевой статизм при возмущениях по нагрузке. С целью ее получения введем внешний контур регулирования скорости (рис. 7.12) и определим передаточную функцию его регулятора исходя из обычных соображений.
uзс |
|
|
|
|
|
|
|
з |
|
ω |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
Wрс( р) |
|
Wc |
( р) |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
одн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uocc |
|
|
|
|
|
|
||||
|
Кс |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||
Рис. 7.12. Структурная схема двукратно интегрирующей системы регулирования скорости
Передаточная функция внутреннего замкнутого контура регулирования скорости (однократно интегрирующая система):
W |
з |
( p) = |
ω( p) |
= |
1/ Kс |
|
|
≈ |
1/ Kс |
|
. |
(7-38) |
|
uзс( p) |
aсTтp(Tтp +1) |
+1 |
aсTтp |
|
|||||||
содн |
|
|
|
+1 |
|
|||||||
Передаточная функция регулятора скорости внешнего контура определится из выражения:
14
Wрс(p) 1/ Kс+ aсTтp 1
Wрс(p)= 1 bсaсTтр
|
1 |
Kс |
= b a T p (a T p +1) . |
|
с с т с т |
. |
|
(7-39)
(7-40)
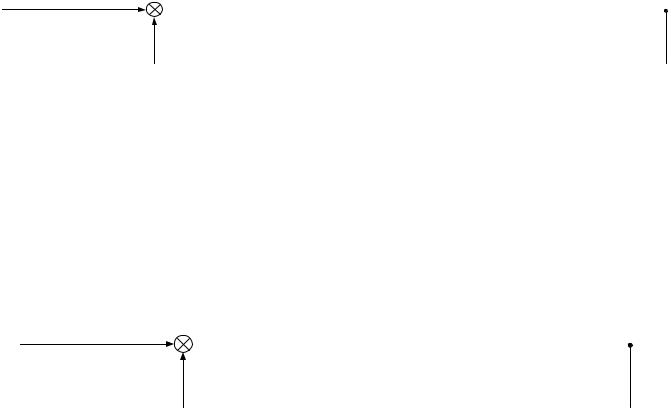
Двукратно интегрирующая система (рис. 7.12) может быть структурно представлена в виде трехконтурной системы регулирования рис. 7.13.
Перенесем внутреннюю точку суммирования сигналов скорости через интегратор 1/(bсaсTтр). Для того, чтобы не вносились изменения надо
коэффициент обратной связи умножить на функцию, обратную той, через которую выполнен перенос - bсaсTтр. Структурная схема преобразуется к
виду рис. 7.14.
|
|
|
И-регулятор |
|
|
|
П-регулятор |
Замкнутый |
|
|
|
|
|||||||||||
uзс |
|
|
|
контур тока |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
uзт |
|
|
|
i |
|
|
|
ω |
|||||
1 |
|
|
|
КтТмСФ |
|
1/ Кт |
|
|
Rэ |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ттр +1 |
|
|
|
|
|
|
||
|
|
|
|
bcacTтp |
|
|
|
|
|
асТтRэКс |
|
|
|
|
|
|
ТмСФр |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
uocc |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
Кс |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
uocc
Кс
Рис. 7.13. Структурная схема САР скорости с двумя регуляторами скорости
u зс |
|
|
|
|
|
|
|
|
|
|
|
u зт |
|
|
|
i |
|
|
|
ω |
||
|
|
|
1 |
|
|
|
|
КтТмСФ |
|
1/ Кт |
|
Rэ |
||||||||||
|
|
|
|
|
|
|
|
|
|
асТтRэКс |
|
|
|
|
Тт р +1 |
|
|
|
ТмСФр |
|
|
|
|
|
|
|
|
bcacTт p |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
uocc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Kc (bcacTт р +1) |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Рис. 7.14. Структурная схема САР скорости с ОС по скорости и ускорению
Полученная структурная схема с обратной связью по скорости и ускорению эквивалентна исходной схеме. В цепи обратной связи по скорости передаточная функция форсирующего звена:
Wос( p) = Kс(bсaсTтp+1). |
(7-41) |
Введем форсирующее звено в прямой канал регулирования. Для сохранения эквивалентности схемы надо умножить задающий сигнал на
15
обратную функцию (фильтр) 1/(bсaсTтр+1) |
(в исходной схеме uзс прямо |
||||||||||||||||||||||||||
поступает на вход интегратора). Полученная структурная схема изображена на |
|||||||||||||||||||||||||||
рис. 7.15. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
u зс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
КтТмСФ |
|
|
|
1/ Кт |
|
|
|
Rэ |
|
|||||
|
|
|
|
|
bcacTт р +1 |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
bcacTт p +1 |
|
|
|
|
|
|
bcacTт p |
|
|
асТтRэКс |
|
Тт р +1 |
|
ТмСФр |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
uocc |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
Кс |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 7.15. Структурная схема САР скорости с одной ОС по скорости, ПИрегулятором и фильтром на входе
Три первых передаточных функции во внутреннем контуре представляют собой регулятор скорости:
|
K T |
CФ |
|
b а Т |
р +1 |
|
Крс(Тр +1) |
|
|
|||
Wрс( p) = |
т м |
|
× |
с с т |
|
|
= |
|
|
. |
(7-42) |
|
асТтRэКс |
bсасТтр |
Тр |
||||||||||
|
|
|
|
|
||||||||
Преобразованная структурная схема контура скорости с ПИ-регулятором скорости и фильтром на входе показана на рис. 7.16.
uзс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
|
1 |
|
|
|
|
|
|
КтТмСФ |
× |
bcacTтp +1 |
|
|
1/ Кт |
|
|
Rэ |
|||||||||
|
|
|
|
|
|
|
|
|
асТтRэКс |
bcacTтp |
|
|
|
Ттр +1 |
|
|
|
ТмСФр |
|
|
|
|||
|
|
bcacTтp +1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
uocc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Кс |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Рис. 7.16. Структурная схема САР скорости с одной ОС по скорости, свернутым ПИ-регулятором и фильтром на входе
При отсутствии на входе фильтра и выборе bс = aс = 2 система
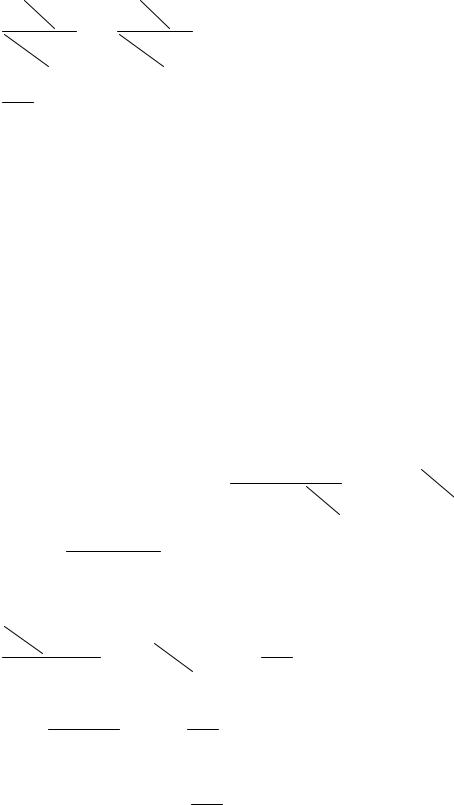
настроена на симметричный оптимум.
На рис. 7.17 изображены кривые тока и скорости двигателя при пуске и реверсе в случае ограничения выхода ПИрегулятора.
16
о.е. |
i |
|
|
1 |
ωз |
|
|
ω |
|
|
|
|
|
|
|
0 |
ωз |
ω |
t |
|
|||
-1 |
|
||
|
|
|
|
-2 |
i |
|
|
|
|
|
|
Рис. 7.17. Пуск и реверс двигателя при ограничением выхода ПИ- |
|||
регулятора скорости ( Мс = Мн) |
|
|
|
Графики аналогичны таковым для системы регулирования с П-регулятором (рис. 7.5). Так как система регулирования двукратно интегрирующая, то ошибка по скорости в установившемся режиме равна нулю. РС выполнен с ограничением, поэтому ускорение привода в переходных режимах зависит от статической нагрузки.
Для поддержания неизменного темпа разгона и торможения применяют ЗИ. Интенсивность протекания переходных процессов зависит от наличия (рис. 7.18) или отсутствия (рис. 7.19) фильтра на входе контура скорости.
о.е. |
i |
|
|
о.е. |
i |
|
2 |
|
|
2 |
|
||
1 |
ωз |
|
|
1 |
ωз |
ω |
0 |
ω |
ω |
|
0 |
|
|
|
t |
ω |
t |
|||
-1 |
|
ωз |
|
-1 |
|
ωз |
-2 |
|
i |
|
-2 |
|
i |
Рис. 7.18. Пуск и реверс двигателя от ЗИ (ПИ-регулятор скорости не насыщен, фильтр на входе контура скорости, Мс=Мн)
Рис. 7.19. Пуск и реверс двигателя от ЗИ (ПИ-регулятор скорости не насыщен, фильтр на входе контура скорости отсутствует, Мс = Мн)
Фильтр затягивает процесс нарастания тока и скорости, что приводит к ошибке по скорости в режиме линейно изменяющегося сигнала ЗИ (рис. 7.18).
В режимах слежения, когда необходима высокая точность отработки задания не только в установившемся, но и в переходных режимах, выходное напряжение ЗИ прямо поступает на вход контура скорости. В процессе
17
достижения током установившегося значения ошибка по скорости уменьшается до нуля (рис. 7.19).
7.5. Расчет параметров ПИ-регулятора скорости
|
|
|
|
|
|
|
|
|
|
|
СТ1 |
СТ2 |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rосс Сосс |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uзс0.5Rзс 0.5Rзс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u рс = uзт |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
РС |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Сзс |
|
|
|
|
|
|
Rс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Uосс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rтг |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
rтг |
|
|
|
|
|
|
|
|
|
ТГ |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 7.20. Принципиальная схема ПИ-регулятора скорости с фильтром Коэффициент усиления пропорциональной части ПИ-регулятора в
двукратно интегрирующей системе равен коэффициенту усиления РС в однократно интегрирующей системе. Поэтому сопротивления Rзс, Rocc, Rc
выбираются аналогично:
K рс |
= |
|
Rосс |
= |
|
KтTмCФ |
|
, |
(7-43) |
|||||||||||
|
R |
зс |
|
|
a T |
R K |
с |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
с т |
э |
|
|
||||
R |
= |
KтгKдтг |
|
R |
зс |
. |
|
|
|
(7-44) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
с |
|
|
|
|
|
Kс |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Постоянная времени обратной связи регулятора: |
|
|||||||||||||||||||
Т = RoccСосс =bcacTт. |
|
|
|
(7-45) |
||||||||||||||||
Постоянная времени фильтра на входе: |
|
|||||||||||||||||||
Т |
ф |
= |
|
1 |
С |
зс |
R |
зс |
= b а Т |
|
. |
|
(7-46) |
|||||||
4 |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
с с т |
|
|
|
||||||||||
Приняв Rзс = 50 ÷100кОм, по уравнениям (7-43)÷(7-46) рассчитывают
Rocc, Rc, Сосс, Сзс.
18
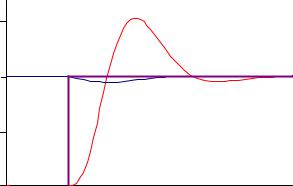
7.6. Установившаяся ошибка по скорости в двукратно интегрирующей системе
7.6.1. Установившийся режим вращения двигателя со статической нагрузкой
Двукратно интегрирующие системы в основном применяются в приводах, работающих в режиме стабилизации скорости вращения. Основные требования к ним определяются, исходя из обеспечения требуемого качества процесса при отработке возмущений по нагрузке. Системы регулирования астатичны как по заданию, так и по возмущению. Статическая ошибка по скорости равна нулю
(рис. 7.22).
|
|
о.е. |
|
|
|
|
|
|
|
1.5 |
|
i |
|
|
|
|
|
|
ω |
|
|
|
|
|
|
1.0 |
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.5 |
iс |
|
|
|
|
|
|
0.0 |
|
|
|
t |
|
Рис. |
7.22. |
Наброс |
нагрузки |
( Мс = Мн) |
|
|
|
в |
системе |
регулирования |
скорости с ПИ-регулятором Сигнал на выходе регулятора скорости, необходимый для компенсации
токового сигнала обратной связи, образуется в течение переходного процесса за счет динамической ошибки по скорости, а восстановление скорости до заданного значения происходит за счет повышенного по сравнению с однократно-интегрирующей системой перерегулирования тока (рис. 7.9, 7-22).
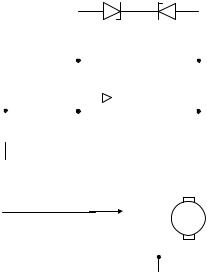
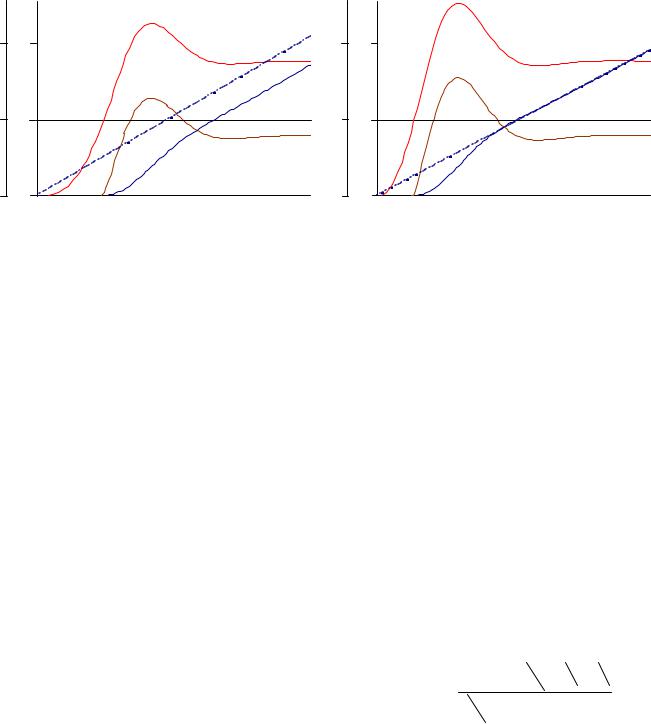
7.6.2. Переходный режим изменения скорости по линейному закону
Для ряда приводов режимы пуска и торможения не играют доминирующей роли. С целью снижения перерегулирования тока в этих режимах в цепь задания включают апериодическое звено (фильтр). Как следствие появляется ошибка по скорости в режимах отработки линейно изменяющегося сигнала задания (рис. 7.23, 7.24).
19
ω |
i |
i |
|
|
ω |
i |
i |
|
0.4 |
2 |
|
|
0.4 |
2 |
|
||
|
|
|
|
|
||||
|
|
iд |
ωз |
|
|
|
iд |
ωз |
0.2 |
1 |
iс |
|
|
0.2 |
1 |
iс |
|
|
|
|
|
|
||||
|
|
ω |
|
|
|
|
ω |
|
0.0 |
0 |
|
|
|
0.0 |
0 |
|
|
|
|
t |
|
t |
Рис. 7.23. Пуск двигателя от ЗИ |
Рис. 7.24. Пуск двигателя от ЗИ |
(ПИ-регулятор скорости не насыщен, |
(ПИ-регулятор скорости не насыщен, |
фильтр на входе контура скорости, |
фильтр на входе контура скорости |
Мс = Мн) |
отсутствует, Мс = Мн) |
Из-за наличия фильтра сигнал задания на входе РС является выходным сигналом апериодического звена. Ошибка по скорости образуется за счет рассогласования между входным и выходным сигналами апериодического звена. Первый из них представляет собой выходное напряжение задатчика интенсивности.
Сигнал задания скорости на входе апериодического звена:
ωз( p) = |
uзс( p) |
= |
Mд |
. |
|
|
(7-47) |
||||
|
|
|
|
|
|||||||
|
|
Kс |
Jp |
|
|
|
|
||||
Сигнал на выходе апериодического звена: |
|
|
|||||||||
ωза( p) = |
ωз( p) |
|
|
= |
Mд |
. |
(7-48) |
||||
bсaсTтp +1 |
Jp(bсaсTтp +1) |
||||||||||
|
|
|
|
|
|||||||
Ошибка по скорости:
ωз( p) −ωза( p) = |
Mд |
|
− |
Mд |
= |
|
Mд |
|||
|
Jp |
Jp(bсaсTтp +1) |
|
J |
||||||
|
|
|
|
|
|
|||||
|
|
Mд |
|
|
1 |
|
. |
|||
= |
|
|
|
bсaсTт |
|
|||||
|
J |
|
b a T p +1 |
|||||||
|
|
|
|
|
|
|
с с т |
|
|
|
Оригинал функции (ошибка по скорости):
×bсaсTт p + 1 − 1 = p (bсaсTтp +1)
(7-49)
∆ω(t) =ωз(t) −ωза(t) = |
Mд |
bсaсTт(1−e−t /(bсaсTт) ). |
(7-50) |
J |
Так как длительность переходного процесса изменения скорости много больше величины bсacTm, то членом e−t /(bcacTm) можно пренебречь.
20