

СКЕ_1 / Модуль1. Электропривод постоянного тока как объект управления
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ НАЦИОНАЛЬНАЯ МЕТАЛЛУРГИЧЕСКАЯ АКАДЕМИЯ УКРАИНЫ
В.Б. Зворыкин
СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ
МОДУЛЬ 1. ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА КАК ОБЪЕКТ УПРАВЛЕНИЯ
Утверждено на заседании Ученого совета академии в качестве учебного пособия
Днепропетровск НМетАУ 2008
УДК 681.51
Зворыкин В.Б. Системы управления электроприводами. Модуль 1: Электропривод постоянного тока как объект управления. Учеб. пособие. - Днепропетровск: НМетАУ, 2008.- 48 с.
Рассмотрены математические модели и составлены структурные схемы:
•двигателя постоянного тока при управлении по цепи якоря и по цепи возбуждения;
•тиристорного преобразователя в режимах непрерывного, гранично-непрерывного и прерывистого тока.
Исследована работа двигателя и тиристорного преобразователя
врежимах непрерывного, гранично-непрерывного и прерывистого тока.
Предложена лабораторная работа по исследованию способов ограничения выходного сигнала регуляторов.
Материал пособия отражает содержание модуля «Электропривод постоянного тока как объект управления» выборочной дисциплины «Системы управления электроприводами», входящей в программу подготовки бакалавров (очной и заочной форм обучения) по направлению 0925 – автоматизация и компьютерноинтегрированные технологии.
Издается в авторской редакции.
Ответственный за выпуск |
А.П. Егоров, канд. техн. наук, доцент |
Рецензенты: |
Н.Н. Казачковский, канд. техн. наук, профессор |
|
(Национальный горный университет Украины) |
|
В.Г. Акуловский, канд. техн. наук, доцент |
|
(Академия таможенной службы Украины) |
|
© Национальная металлургическая |
|
академия Украины, 2008 |
2
Введение
Внастоящее время существенно расширились области и объемы применения тиристорного электропривода постоянного и переменного тока.
Современные системы автоматизированного электропривода характеризуются преимущественным использованием принципов подчиненного регулирования, расширением способов адаптивного управления, применением аналоговых и цифровых систем управления на базе интегральных микросхем.
Вучебном пособии основное внимание уделяется теории, принципам построения и методам расчета современных автоматических систем управления тиристорными электроприводами постоянного тока.
Пособие отражает содержание первого модуля дисциплины «Системы управления электроприводами»:
•модуль 1 – «Электропривод постоянного тока как объект управления»,
•модуль 2 – «Системы подчиненного управления»,
•модуль 3 – «Регулирование скорости электропривода»,
•модуль 4 – «Регулирование ЭДС и положения электропривода»,
• модуль 5 – курсовая |
работа |
«Расчет |
системы |
однозонного |
регулирования скорости (ЭДС) |
двигателя с подчиненным контуром |
|||
регулирования тока якоря» Рассмотрены математические модели и составлены структурные схемы
двигателя постоянного тока (ДПТ) при управлении по цепи якоря и по цепи возбуждения.
Описана работа тиристорного преобразователя (ТП) на двигательную нагрузку. Получены выражения для внешних и регулировочных характеристик ТП. Проанализированы динамические свойства ТП в режимах непрерывного и прерывистого тока. Исследованы особенности поведения преобразователя в режимах гранично-непрерывного и прерывистого тока. Показано, что в режиме прерывистого тока происходит деформация внешних характеристик ТП и механических характеристик привода постоянного тока.
Последняя часть пособия представляет собой лабораторный практикум. При его выполнении студентам предлагается исследовать поведение систем регулирования с помощью пакета моделирования динамических систем
MATLAB / SIMULINK.
3
1.Двигатель постоянного тока как объект регулирования.
1.1.Цепь якоря и механическая часть
Двигатель постоянного тока с независимым возбуждением ДПТ является наиболее распространенным типом двигателей постоянного тока. При его рассмотрении будем полагать, что размагничивающее действие реакции якоря компенсировано, а индуктивность якорной цепи постоянна. Действие вихревых токов, проявляющееся при изменении магнитного потока, учитывается как действие короткозамкнутой обмотки, расположенной на полюсах.
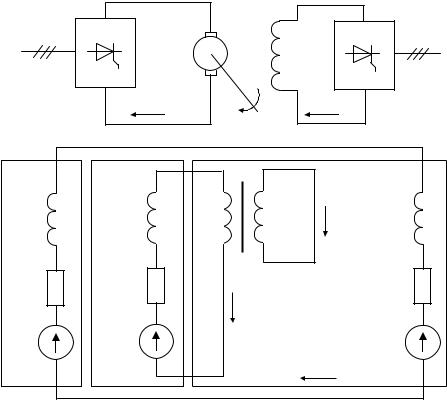
В математической модели (рис. 1.1) ДПТ имеет обмотку якоря и обмотку возбуждения, которые получают питание от независимых источников постоянного тока ТПЯ и ТПВ. К якорю двигателя с моментом инерции J , вращающемуся со скоростью ω, приложен электромагнитный момент М , под действием которого механическая часть электропривода приводится в движение.
|
ТПЯ |
ДПТ |
|
|
ТПВ |
сеть |
|
ОВ е |
|
сеть |
|
е |
|
|
|||
~ |
d |
|
dв |
|
~ |
|
i |
|
iв |
|
а) |
|
|
|
ω, М |
|
|
|
|
|
|
|
|
ТПЯ |
ТПВ |
|
|
|
ДПТ |
Lпр |
L |
Lв |
Lвт |
iвт |
Lя |
прв |
Rв |
Rвт |
|||
Rпр |
Rпрв |
|
М |
|
Rя |
|
iв |
|
|||
ed |
edв |
|
|
eдв |
|
|
i |
|
|||
|
|
|
|
|
б)
Рис. 1.1. Силовая часть электропривода постоянного тока: а – принципиальная схема, б – схема замещения
4
Переходные процессы, протекающие в двигателе постоянного тока, с учетом механической и электромагнитной инерции, описываются следующими уравнениями:
•уравнение электрического равновесия для цепи якоря;
•уравнение, связывающее электромагнитный момент и ток двигателя;
•уравнение, связывающее ЭДС двигателя и частоту вращения;
•уравнение движения электропривода.
|
е |
= (R |
я |
+ R )i +(L |
я |
+ L ) |
di |
+e |
|
|||
|
|
|
||||||||||
d |
|
|
|
пр |
пр dt |
дв |
|
|||||
|
М = СФi |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
. |
|
|||
е |
= СФω |
|
|
|
|
|
|
(1-1) |
||||
|
дв |
|
|
|
|
|
|
|
|
|
|
|
|
М − Мс = |
J |
dω |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||||||
dt |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||
Система уравнений (1-1) позволяет проанализировать динамические особенности ДПТ как объекта управления, пользуясь методами теории автоматического управления.
Введем понятие электромагнитной постоянной времени цепи якоря:
Тэ = |
Lэ |
, |
|
|
|
|
(1-2) |
||||
R |
|
|
|
|
|||||||
|
|
|
э |
|
|
|
|
|
|
|
|
где R |
я |
+ R |
= R |
- активное сопротивление цепи якоря; L |
я |
+ L |
пр |
= L |
э |
- |
|
|
|
пр |
э |
|
|
|
|
||||
индуктивность цепи якоря.
С учетом формулы (1-2) уравнение электрического уравнения для цепи якоря в операторной форме запишется в виде:
ed = Rэ(1+Tэp)i +eдв. |
(1-3) |
|||
По аналогии с электромагнитной постоянной времени введем понятие |
||||
электромеханической постоянной времени Тм . |
|
|||
|
|
Jω |
|
|
Тм |
= |
о |
. |
(1-4) |
M |
||||
|
|
кз |
|
|
Тм |
– это время, в течение которого привод с моментом инерции J |
при |
||
динамическом моменте, равном моменту короткого замыкания Мкз, достигнет скорости идеального холостого хода ωо.
5

В уравнении (1-4) неизвестны Мкз и ωо. Для их определения
воспользуемся механической характеристикой двигателя постоянного тока. Рассмотрим точки короткого замыкания и идеального холостого хода.
Режим установившегося короткого замыкания ( р = 0, ω = 0, едв = 0 ).
Второе уравнение системы (1-1) и уравнение (1-3) запишутся в виде:
М = Мкз = СФIкз, |
(1-5) |
||
еd = RэIкз. |
(1-6) |
||
Выразим из формулы (1-6) Iкз и подставим полученное значение в (1-5): |
|||
Мкз = СФ |
еd |
. |
(1-7) |
|
|||
|
Rэ |
i = 0 , |
|
Режим установившегося идеального холостого хода ( р = 0, |
|||
ω =ωо).
ЭДС двигателя в соответствии с третьим уравнением системы (1-1) и уравнением (1-3):
е |
= е |
= СФω |
о |
. |
(1-8) |
дво |
d |
|
|
Скорость идеального холостого хода:
ωо = СФеd .
Уравнение (1-4) с учетом (1-7) и (1-9) представим в виде:
|
J |
ed |
||||||
|
|
|
|
= |
JRэ |
. |
||
Тм = |
СФ |
|||||||
|
СФ |
ed |
|
|
С2Ф2 |
|
||
|
Rэ |
|||||||
|
|
|
||||||
Преобразуем уравнение движения:
М − Мс = Jрω .
Учитывая второе уравнение системы (1-1), получим: i −iс = СФJ pω .
Заменим J СФ в соответствии с формулой (1-10): i −iс = TRмэ СФpω.
СФ в соответствии с формулой (1-10): i −iс = TRмэ СФpω.
(1-9)
(1-10)
(1-11)
(1-12)
(1-13)
6
На основании выражений (1-3), (1-13) разрешим систему уравнений (1-1) относительно тока, скорости и ЭДС двигателя:
i = |
ed −eдв |
|
|
|
||
|
|
|
||||
|
R (T p |
+1) |
|
|
|
|
|
э э |
Rэ |
|
|
||
ω = (i −i ) |
|
. |
(1-14) |
|||
|
|
|||||
|
c TмСФр |
|
||||
|
|
|||||
|
|
|
|
|
|
|
eдв = CФω |
|
|
|
|
||
|
|
|
|
|
|
|
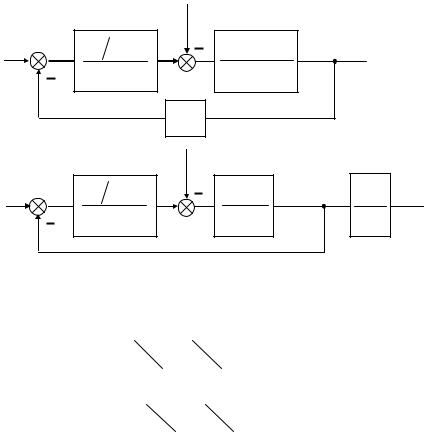
Система уравнений (1-14) описывает переходные процессы в двигателе постоянного тока с учетом электромагнитной и механической инерции. Представим данную систему в виде структурной схемы, входами которой являются напряжение преобразователя, питающего якорную цепь и ток нагрузки, выходом – частота вращения двигателя.
ed |
|
i |
iс |
Rэ |
|
1 Rэ |
|
ω |
|||
|
Тэр+1 |
|
|
ТмСФр |
|
|
|
СФ |
|
|
|
ed |
1 Rэ |
i |
iс |
Rэ eдв |
1 ω |
|
Тэр+1 |
|
|
Тмр |
СФ |
Рис. 1.2. Структурная схема двигателя постоянного тока без учета контура возбуждения
Передаточная функция двигателя в соответствии с рис. 1.2:
|
ω(p) |
|
|
|
1/ Rэ |
× |
Rэ |
|
1 |
|
|
|
|
|
|||||||||||
|
|
|
|
Tэp +1 |
|
Tмp |
|
|
1 |
|
|
|
|
|
|
|
|||||||||
W ( p) = |
= |
|
|
|
|
|
× |
= |
|
|
СФ |
|
|
|
. (1-15) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
дв |
e |
(p) |
|
|
|
|
1/ Rэ |
|
|
|
Rэ СФ |
TмTэp |
2 + |
Tмp |
+ |
1 |
|||||||||
|
d |
|
|
1+ |
|
× |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
T p +1 |
T p |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
э |
|
|
|
м |
|
|
|
|
|
|
|
|
||||||
Переходные функции двигателя изображены на рис. 1.3.
7
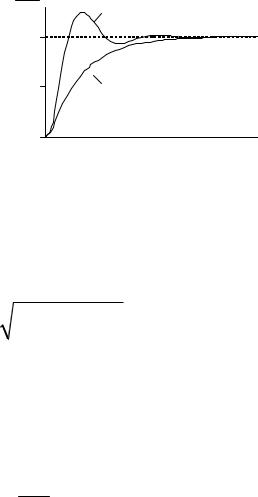
ω |
|
еd |
2 |
1.0 |
|
0.5 |
1 |
0.0 |
t |
|
Рис. 1.3. Переходные функции двигателя постоянного тока: 1 – Тм / Тэ = 4; 2 – Тм / Тэ = 0.25
Вид переходного процесса определяется корнями характеристического уравнения (1-15):
|
−Т |
м |
± |
Т2 − 4Т |
Т |
|
|
|
|
|
|
|
|
|
р1,2 = |
|
|
м |
м э |
. |
|
|
|
|
(1-16) |
||||
|
|
|
2ТмТэ |
|
|
|
Т / Т ≥ 4 |
|||||||
|
|
|
|
|
Т |
|
− 4Т Т ≥ 0 |
|
|
|||||
Корни действительные при |
2 |
или |
. В этом |
|||||||||||
|
|
м э |
м |
э |
||||||||||
|
|
|
|
|
|
|
м |
|
|
|||||
случае переходный процесс нарастания скорости соответствует переходному процессу в двойном апериодическом звене (рис. 1.3, кривая 1):
1
Wдв( p) = |
|
СФ |
. |
(1-17) |
|
( р− р1)( р− р2) |
|||||
|
|
|
|||
При Тм / Тэ < 4 |
корни мнимые и процесс нарастания скорости будет |
||||
колебательным (рис. 1.3, кривая 2).
1.2. Цепь возбуждения
Для цепи возбуждения схемы замещения (рис. 1.1,б) справедлива система уравнений:
e |
|
= (R + R |
)i + (L + L |
) |
diв |
− M |
diвт |
|
|||||
|
dt |
dt |
|
||||||||||
|
dв |
|
в |
прв |
в |
в прв |
|
|
(1-18) |
||||
|
|
di |
|
|
|
di |
|
|
|
|
|||
M |
|
в |
= R |
i |
+ L |
вт |
|
|
|
|
|
|
|
|
dt |
dt |
|
|
|
|
|
||||||
|
|
|
вт вт |
вт |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Практически Rпрв << Rв и Lпрв << Lв, поэтому в операторной форме можно записать:
8
edв=iвRв(Tвp+1)−Mpiвт,
(1-19)
Mpiв=iвтRвт(Tвтp+1)
где Т |
= L |
в |
/ R |
в |
- |
постоянная |
времени контура возбуждения; |
в |
|
|
|
|
|
||
Твт = Lвт/ Rвт |
|
- |
постоянная времени контура вихревых токов; |
||||
М = Км |
Lв ×Lвт |
- |
коэффициент |
взаимоиндукции между контурами |
|||
возбуждения и вихревых токов.
В рассматриваемом случае контурами высок, и можно полагать
М= Lв ×Lвт ,
М= Lв wвт = Lвт wв . wв wвт
коэффициент магнитной связи между Км =1, тогда:
(1-20)
(1-21)
Определим связь между током возбуждения и ЭДС преобразователя возбуждения, для чего из второго уравнения (1-19) выразим iвт и подставим
полученное выражение в первое уравнение (1-19).
|
iвт = |
|
|
|
Mpiв |
|
|
|
, |
|
|
|
|
|
|
|
(1-22) |
|||||
|
R |
|
|
(T |
|
p |
+1) |
|
|
|
|
|
|
|
||||||||
|
|
|
вт |
вт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
еdв = iвRв(Tвp + |
|
|
|
|
M 2 p2iв |
. |
|
|
|
(1-23) |
|||||||||||
|
1) − Rвт(Tвтp +1) |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||
|
Вынесем за скобки iвRв, |
заменим коэффициент взаимоиндукции М в |
||||||||||||||||||||
соответствии с формулой (1-20) и приведем подобные члены: |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
L L p2 |
|
|
|
|
T T p2 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в вт |
|
|
|
|
в вт |
|
|
|
еdв = iвRв |
|
Tвp + |
1− |
|
|
|
|
= iвRв Tвp +1− |
|
= |
|||||||||||
|
|
R R |
|
|
(T p +1) |
|
Tвтp +1 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
в вт |
вт |
|
|
|
|
|
|
||
= i R |
TвTвтp2 +Tвp +Tвтp +1− TвTвтp2 |
= |
(Тв +Твт) р +1i R . (1-24) |
|||||||||||||||||||
в в |
|
|
|
|
Tвтp +1 |
|
|
|
|
|
|
Твтр +1 |
в в |
|
||||||||
|
Разрешим уравнение (1-24) относительно iв: |
|
|
|
||||||||||||||||||
|
iв = |
edв |
× |
|
|
Tвтp +1 |
|
. |
|
|
|
|
|
(1-25) |
||||||||
|
R |
(T |
+T |
|
) p +1 |
|
|
|
|
|
||||||||||||
|
|
|
в |
|
|
в |
|
вт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Определим связь между током возбуждения и ЭДС двигателя.
9
Суммарная намагничивающая сила, создаваемая контурами обмоток возбуждения и вихревых токов, равна:
|
|
|
|
|
|
|
|
|
|
Mpiвwвт |
|||||
F = iвwв −iвтwвт = iвwв − |
|
|
|
|
|
. |
|||||||||
R |
|
(Т |
вт |
p +1) |
|||||||||||
|
|
|
|
|
|
wв |
|
|
|
вт |
|
|
|
||
Учитывая, что М = L |
|
, получим: |
|
|
|||||||||||
|
|
|
|
вт w |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
вт |
|
|
|
|
|
|
|
||
|
|
|
|
Lвтwв wвт p |
|
|
|
|
|
|
|
||||
F =i |
w |
− |
|
|
|
= |
|
|
|
||||||
wвтRвт(Tвтp + |
|
|
|
|
|||||||||||
в |
|
в |
|
1) |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= i w |
|
Твтp +1− Твтp |
|
= |
|
i w |
|
|
|||||||
|
|
Tвтp +1 |
|
|
|
|
|
в в . |
|||||||
в в |
|
|
|
|
|
|
|
Tвтp +1 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1-26)
(1-27)
Магнитный поток, создаваемый суммарной намагничивающей силой:
|
∆Ф |
|
i w |
∆Ф |
|
|
|
|
в в |
∆ |
|
(1-28) |
|
Ф = F |
= |
F |
, |
|||
F |
T |
p +1 |
|
|||
|
∆ |
|
вт |
|
|
|
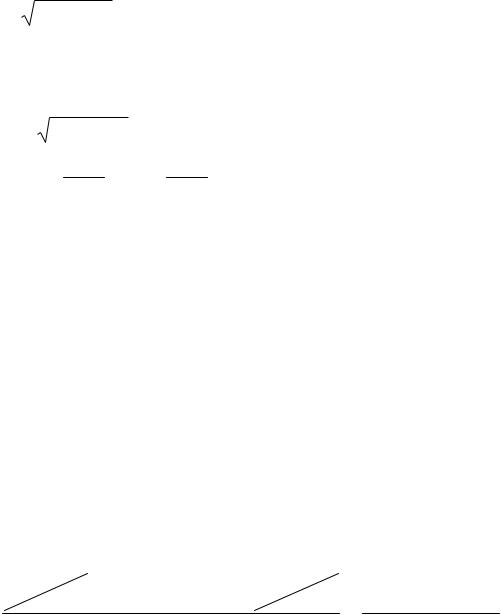
где ∆Ф/ ∆F – тангенс угла наклона кривой намагничивания (рис. 1.4).
Ф |
∆Ф |
∆F |
F |
Рис. 1.4. Кривая намагничивания машины постоянного тока ЭДС двигателя:
|
|
|
|
|
|
|
|
∆Ф |
w Сω |
|
КфСω |
|
|
|
|
Квω |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
е |
|
= СФω = |
|
∆F |
в |
|
|
i |
= |
|
i |
= |
|
i , |
(1-29) |
|||||||||||
|
|
|
T p |
|
|
Т |
|
р + |
|
Т |
|
||||||||||||||||
|
дв |
|
|
|
|
|
+1 в |
|
вт |
1 в |
|
вт |
р+1 в |
|
|||||||||||||
|
|
|
|
∆Ф |
|
|
|
|
вт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где К |
ф |
= |
|
w ; К |
в |
= К |
ф |
С. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
F в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
∆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Структурная схема контура возбуждения, построенная в соответствии с уравнениями (1-25) и (1-29), показана на рис. 1.5.
10