

СКЕ_1 / Модуль1. Электропривод постоянного тока как объект управления
.pdf3. Лабораторный практикум
Работа А Исследование способов ограничения выходного сигнала
регуляторов при моделировании
Цель работы: изучить способы ограничения выходной величины П-, И-, и ПИ-регуляторов при структурном моделировании систем автоматического регулирования.
А1. Особенности ограничения выхода структурных звеньев
Необходимость ограничения выхода регуляторов обусловлена как условиями физической реализуемости систем регулирования, так и требованиями ограничения регулируемых величин.
Сложность моделирования подобных регуляторов обусловлена особенностями их реализации на блоках SIMULINK.
А1.1. П-регулятор
Для моделирования П-регулятора с ограничением выхода используются блоки Gain (Усилитель) и Saturation (Насыщение). Для блока Gain задается величина коэффициента усиления К, для блока Saturation два пара-
метра: верхнее ymax и нижнее ymin ограничения (рис. А-1).
|
Gain |
Saturation |
|||||
х |
К |
|
|
|
|
|
у |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. А-1. Структурная схема модели блока П-регулятора с ограничением
А1.2. И-регулятор
Для моделирования И-регулятора с ограничением выхода используются блоки Gain (Усилитель) и Integrator (Интегратор). Для блока Gain
41

задается величина коэффициента усиления Ки, для блока Integrator - два параметра: верхнее ymax и нижнее ymin ограничения (рис. А-2).
|
Gain |
Integrator |
|
||||
х |
Ки |
|
|
1 |
|
|
у |
|
|
|
р |
|
|
||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Рис. А-2. Структурная схема модели И-регулятора с ограничением
1.3. ПИ-регулятор
Передаточная функция ПИ-регулятора имеет вид:
W ( р) = |
К(Тр+1) |
. |
(А-1) |
|
|||
|
Тр |
|
|
В тех случаях, когда требуется ограничение выхода ПИ-регулятора, формулу (А-1) целесообразно представить в виде:
|
К Тр+1 |
|
1 |
|
Ки |
|
|
||
W ( р) = |
( |
) |
= 1+ |
|
|
К = 1+ |
К. |
(А-2) |
|
|
|
|
р |
||||||
|
Тр |
Тр |
|||||||
|
|
|
|
|
|
|
|
|
|
Для реализации уравнения (А-2) необходимы усилитель, интегратор и сумматор. Поскольку ограничивается суммарный сигнал, на выходе регулятора устанавливается блок с насыщением. При достижении ограничения ключом Кл должен отключаться вход интегратора (рис. А-3).
х |
|
Кл |
Ки |
у |
К |
|
|||
|
|
р |
|
|
|
|
|
|
Рис. А-3. Структурная схема ПИ-регулятора с ограничением Структурная схема модели на блоках SIMULINK, соответствующая
функциональной схеме рис. А-3 и уравнению (А-2), показана на рис. А-4.
42
Gain |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Sum |
Saturation |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
у |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
х К |
|
|
|
Switch |
|
|
|
Integrator |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Ки |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Relational |
Constant |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
Operator |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
ymax |
|
|
|
|
Abs |
|
|
|
|
|
|
|||||||||
|
|
|
|
< = |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. А-4. Структурная схема модели ПИ-регулятора с ограничением
А2. Программа выполнения работы А2.1. Ограничение выхода П-регулятора
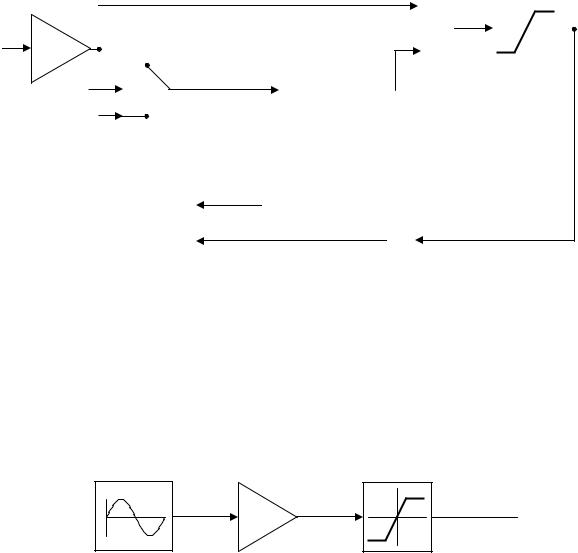
А2.1.1. Схема модели изображена на рис. А1-5. Исходные данные для расчета модели приведены в приложении 1.
SineWave |
Gain |
Saturation |
х |
К |
у |
|
Рис. А-5. Схема моделирования П-регулятора с ограничением
А2.1.2. Определить параметры типовых блоков SIMULINK, соответствующих структурной схеме модели П-регулятора, с учетом ограничения его выхода. Входным сигналом является синусоида с амплитудой A и угловой частотой ω:
x=Asin(ωt ). |
(А-3) |
А2.1.3. Определить время моделирования таким образом, чтобы на графике поместилось пять периодов синусоиды.
А2.1.4. Промоделировать переходные процессы, вывести на одном графике кривые входного сигнала x , выхода усилителя Gain и выходного сигнала y .
А2.1.5. Проанализировать полученные результаты, сделать выводы.
43

А2.2. Ограничение выхода И- и ПИ-регуляторов
А2.2.1. Укрупненная схема модели изображена на рис. А-6. Исходные данные для расчета модели приведены в приложении 1.
Step |
х |
|
y1 |
|
|
И-регулятор с ограниче- |
|||
|
|
|
нием (рис. А-2) |
|
|
|
|
у2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ПИ-регулятор с ограни- |
|
|
|
|
чением (рис. А-4) |
|
|
|
|
|
|
|
|
|
|
|
Рис. А-6. Укрупненная схема модели ограничения выхода И-, ПИрегуляторов
А2.2.2. Определить параметры типовых блоков SIMULINK, соответствующих структурным схемам моделей И-, ПИ-регуляторов, с учетом ограничения их выходов.
А2.2.3. Определить время tи, по истечении которого, выход
И-регулятора (рис. А-2) достигнет уровня ограничения (сигнал на входе равен
х).
А2.2.4. Входной сигнал х И- и ПИ-регуляторов должен скачкообразно изменяться (от исходного положительного до такого же по модулю
отрицательного значения) в момент времени tо =1.2tи.
А2.2.5. Для скачкообразного изменения знака сигнала на входе И- и ПИрегуляторов используется блок Step (генератор ступенчатого сигнала с заданными параметрами).
А2.2.6. Время моделирования – 3.6tи.
А2.2.7. Промоделировать переходные процессы, вывести на одном графике кривые входного сигнала x , выходного сигнала И-регулятора y1,
выходного сигнала ПИ-регулятора y2 .
А2.2.8. Проанализировать полученные результаты, сделать выводы. А2.2.9. Выделить блоки, относящиеся к модели ПИ-регулятора с
ограничением. Разместить выбранные блоки в подсистеме. Подсистеме присвоить имя Pi−reg .
44
А2.2.10. Убедиться, что после создания подсистемы Pi−reg работа ПИрегулятора с ограничением не изменится.
А3. Содержание отчета
А3.1. Наименование и цель работы.
А3.2. Структурная схема модели П-регулятора с ограничением (рис. А-1). А3.3. Структурная схема модели И-регулятора с ограничением (рис. А-2). А3.4. Структурная схема модели ПИ-регулятора с ограничением
(рис. А-4).
А3.5. Расчеты по пунктам А2.1.2, А2.1.3, А2.2.2-А2.2.4.
А3.6. Графики изменения входного и выходного сигналов П-, И-, ПИ-регуляторов.
45
Приложение 1
Варианты заданий к работе А
№ |
|
П-регулятор |
И-регулятор |
|
|
ПИ-регулятор |
|
|||||
A |
ω |
К |
ymax |
Ки |
ymax |
|
х |
К |
Ки |
ymax |
х |
|
1 |
0.8 |
100 |
4 |
2.0 |
2 |
2.0 |
|
2.0 |
0.75 |
2 |
3.0 |
2.0 |
2 |
1.2 |
40 |
6 |
3.0 |
1 |
3.0 |
|
2.5 |
0.36 |
1 |
2.0 |
2.5 |
3 |
1.6 |
75 |
8 |
4.0 |
1 |
2.5 |
|
1.8 |
1.16 |
1 |
5.0 |
1.8 |
4 |
4.0 |
50 |
20 |
10.0 |
10 |
4.0 |
|
1.0 |
0.56 |
10 |
2.8 |
1.0 |
5 |
3.4 |
50 |
17 |
8.5 |
45 |
8.0 |
|
1.6 |
0.49 |
45 |
4.7 |
1.6 |
6 |
2.6 |
75 |
13 |
6.7 |
20 |
5.5 |
|
2.7 |
0.73 |
20 |
6.0 |
2.7 |
7 |
2.8 |
40 |
14 |
7.1 |
80 |
3.5 |
|
4.0 |
1.16 |
80 |
8.7 |
4.0 |
8 |
1.8 |
100 |
9 |
4.6 |
110 |
7.9 |
|
4.5 |
0.77 |
110 |
9.6 |
4.5 |
9 |
1.2 |
100 |
6 |
3.2 |
35 |
11.0 |
|
2.1 |
0.78 |
35 |
10.2 |
2.1 |
10 |
3.8 |
40 |
19 |
9.5 |
76 |
9.6 |
|
3.0 |
0.63 |
76 |
7.9 |
3.0 |
11 |
2.4 |
75 |
12 |
6.3 |
63 |
8.7 |
|
2.8 |
0.30 |
63 |
3.5 |
2.8 |
12 |
3.0 |
50 |
15 |
7.8 |
28 |
6.0 |
|
8.0 |
0.29 |
28 |
4.0 |
8.0 |
13 |
2.1 |
60 |
10 |
5.3 |
5 |
4.7 |
|
2.4 |
0.77 |
5 |
5.5 |
2.4 |
14 |
1.1 |
70 |
5 |
2.8 |
15 |
2.8 |
|
5.0 |
0.92 |
15 |
7.2 |
5.0 |
15 |
2.7 |
80 |
13 |
6.5 |
34 |
5.0 |
|
5.7 |
0.75 |
34 |
8.0 |
5.7 |
16 |
0.2 |
100 |
20 |
2.0 |
7 |
2.0 |
|
2.2 |
0.80 |
7 |
3.0 |
2.2 |
17 |
0.4 |
40 |
18 |
6.0 |
6 |
3.0 |
|
3.0 |
0.20 |
6 |
2.0 |
3.0 |
18 |
0.6 |
75 |
16 |
8.0 |
6 |
2.5 |
|
2.3 |
1.40 |
6 |
5.0 |
2.3 |
19 |
0.8 |
50 |
14 |
10.0 |
15 |
4.0 |
|
1.5 |
0.20 |
15 |
2.8 |
1.5 |
20 |
1.0 |
50 |
12 |
10.0 |
50 |
8.0 |
|
2.1 |
0.20 |
50 |
4.7 |
2.1 |
21 |
1.2 |
75 |
10 |
9.0 |
25 |
5.5 |
|
3.2 |
0.80 |
25 |
6.0 |
3.2 |
22 |
1.4 |
40 |
8 |
8.0 |
85 |
3.5 |
|
4.5 |
1.20 |
85 |
8.7 |
4.5 |
23 |
1.6 |
100 |
6 |
7.0 |
115 |
7.9 |
|
5.0 |
0.70 |
115 |
9.6 |
5.0 |
24 |
1.8 |
100 |
4 |
6.0 |
40 |
11.0 |
|
2.6 |
0.50 |
40 |
10.2 |
2.6 |
25 |
2.0 |
40 |
2 |
3.0 |
80 |
9.6 |
|
3.5 |
0.10 |
80 |
7.9 |
3.5 |
26 |
2.2 |
75 |
20 |
36.0 |
70 |
8.7 |
|
3.3 |
0.12 |
70 |
3.5 |
3.3 |
27 |
2.4 |
50 |
18 |
30.0 |
30 |
6.0 |
|
8.5 |
0.15 |
30 |
4.0 |
8.5 |
28 |
2.6 |
60 |
16 |
28.0 |
10 |
4.7 |
|
2.9 |
0.60 |
10 |
5.5 |
2.9 |
29 |
3.0 |
70 |
14 |
34.0 |
20 |
2.8 |
|
5.5 |
0.90 |
20 |
7.2 |
5.5 |
30 |
3.2 |
80 |
12 |
28.0 |
40 |
5.0 |
|
6.3 |
0.80 |
40 |
8.0 |
6.3 |
31 |
3.4 |
100 |
10 |
30.0 |
10 |
2.0 |
|
2.5 |
0.60 |
10 |
3.0 |
2.5 |
32 |
3.6 |
40 |
8 |
24.0 |
9 |
3.0 |
|
3.3 |
0.14 |
9 |
2.0 |
3.3 |
33 |
3.8 |
75 |
6 |
18.0 |
9 |
2.5 |
|
2.6 |
1.20 |
9 |
5.0 |
2.6 |
34 |
4.0 |
50 |
4 |
12.0 |
20 |
4.0 |
|
1.8 |
0.20 |
20 |
2.8 |
1.8 |
35 |
4.2 |
50 |
2 |
7.0 |
55 |
8.0 |
|
2.4 |
0.15 |
55 |
4.7 |
2.4 |
36 |
4.4 |
75 |
12 |
45.0 |
30 |
5.5 |
|
3.5 |
0.25 |
30 |
6.0 |
3.5 |
37 |
4.6 |
40 |
15 |
60.0 |
90 |
3.5 |
|
4.8 |
1.20 |
90 |
8.7 |
4.8 |
38 |
4.8 |
100 |
10 |
40.0 |
120 |
7.9 |
|
5.3 |
0.80 |
120 |
9.6 |
5.3 |
39 |
5.0 |
100 |
5 |
15.0 |
45 |
11.0 |
|
2.9 |
0.20 |
45 |
10.2 |
2.9 |
40 |
5.2 |
40 |
13 |
50.0 |
85 |
9.6 |
|
3.8 |
0.25 |
85 |
7.9 |
3.8 |
46
Литература
1.Сен П. Тиристорные электроприводы постоянного тока. М.: Энергоатомиздат, 1985.-231 с.
2.Лебедев Е.Д., Неймарк В.Е., Пистрак И.Я., Слежановский О.В. Управление вентильными электроприводами постоянного тока. М.: Энергия, 1970.-197 с.
3.Шипилло В.П. Автоматизированный вентильный электропривод. М.:
Энергия, 1969.-400 с.
4.Перельмутер В.М., Сидоренко В.А. Системы управления тиристорными электроприводами постоянного тока. М.: Энергоатомиздат, 1988.-304 с.
5.Зворыкин В.Б. Системы подчиненного управления электроприводами постоянного тока (часть I). Учеб. пособие. - Днепропетровск: НМетАУ, 2003.- 96 с.
Содержание |
|
Введение |
3 |
1. Двигатель постоянного тока как объект регулирования |
4 |
1.1. Цепь якоря и механическая часть |
4 |
1.2. Цепь возбуждения |
8 |
2. Тиристорный преобразователь как объект управления |
12 |
2.1. ЭДС преобразователя |
12 |
2.2. Статические характеристики преобразователя в режиме непрерывного |
15 |
тока |
|
2.3. Механические характеристики двигателя в режиме непрерывного |
22 |
тока |
|
2.4. Статические характеристики преобразователя в режиме прерывистого |
23 |
тока |
|
2.4.1. Граничный режим |
25 |
2.4.2. Режим прерывистого тока |
29 |
2.5. Механические характеристики двигателя постоянного тока в режиме |
34 |
прерывистого и непрерывного тока |
|
2.6. Динамические свойства преобразователя в режиме непрерывного тока |
35 |
2.7. Динамические свойства преобразователя в режиме прерывистого тока |
37 |
47
2.8. Коэффициент усиления преобразователя |
38 |
2.8.1. Управляющее напряжение синусоидальной формы |
39 |
2.8.2. Управляющее напряжение пилообразной формы |
40 |
3. Лабораторный практикум |
41 |
Работа А. Исследование способов ограничения выходного сигнала |
41 |
регуляторов при моделировании |
|
Приложение 1. Варианты заданий |
46 |
Литература |
47 |
Учебное издание
Владимир Борисович Зворыкин
СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ
МОДУЛЬ 1. ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА КАК ОБЪЕКТ УПРАВЛЕНИЯ
Учебное пособие
Тем. план 2008, поз. 189 Подписано к печати 17.04.08 Формат 60х84 1/16. Бумага типогр.
Печать плоская. Уч.-изд. л. 2.82. Усл. печ. л. 2.79 Тираж 150 экз. Заказ № 57
Национальная металлургическая академия Украины 49600, Днепропетровськ-5, пр. Гагарина, 4
_____________________
Редакционно-издательский отдел НМетАУ
48