

СКЕ_1 / Модуль3. Регулирование скорости электропривода
.pdfУстановившаяся ошибка в режиме линейного изменения скорости:
ω(t) = |
Mд |
b a T . |
(7-51) |
|
J |
||||
∆ |
с с т |
|
В тех случаях, когда требуется обеспечить высокую точность регулирования скорости не только в установившемся режиме работы, но также при разгоне и замедлении привода, апериодическое звено на входе системы не ставится (рис. 7.24). Контур регулирования скорости настраивается на симметричный оптимум. Как следствие этого, переходные процессы протекают более быстро. Устранение ошибки по скорости происходит за счет роста производной тока и перерегулирования тока (рис. 7.23, 7-24).
7.7. Выбор запаса по напряжению преобразователя для системы регулирования скорости
ЭДС преобразователя: |
|
|
|
|
|
|||
e |
= e |
+iR |
+T R |
di |
= e |
+ K iR . |
(7-52) |
|
|
||||||||
d |
дв |
э |
э э dt |
дв |
e |
э |
|
|
В двухконтурной системе регулирования скорости с задатчиком интенсивности запас по напряжению должен выбираться с учетом быстродействия контура регулирования скорости. Так, при отсутствии в контуре скорости дополнительных инерционностей и настройке на модульный
оптимум (однократно интегрирующая система), значение di снижается вдвое dt
по сравнению с аналогичной величиной при ступенчатом приложении задания на ток. Для настройки контура скорости на симметричный оптимум (двукратно интегрирующая система) требуется повышенный запас по напряжению (так как больше перерегулирование тока).
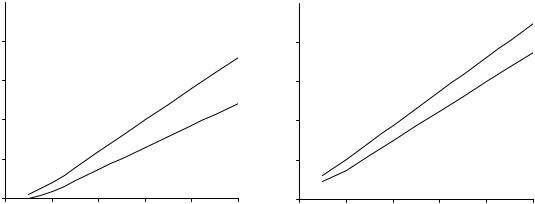
На рис. 7.25 даны кривые для выбора коэффициента
|
|
|
|
Tэ |
|
при отсутствии и наличии фильтров в канале скорости |
K |
e |
= F |
|
|
||
|
|
2T |
+T |
|
|
|
|
|
|
µ |
фс |
|
|
для одно- и двукратно интегрирующей системы регулирования скорости.
21
ке |
Однократно интег- |
|
ке |
Двукратно интег- |
|
|
||||
5 |
рирующая САР |
|
5 |
рирующая САР |
|
|
||||
4 |
|
|
|
|
4 |
|
|
1 |
2 |
|
|
|
1 |
|
|
|
|
|
|
||
3 |
|
|
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
2 |
|
|
|
|
2 |
|
|
|
|
|
1 |
2 |
4 |
6 |
8 |
1 |
2 |
4 |
6 |
8 |
10 |
|
10 |
|||||||||
Рис. 7.25. |
Кривые для выбора коэффициента Ке, |
определяющего запас |
||||||||
по напряжению преобразователя:
1 – система без фильтров в контуре скорости (Тфс = 0);
2 – система с фильтром в контуре скорости.
Вопрос о запасе по напряжению очень важен. Завышенный запас требует повышения мощности силового трансформатора, что ухудшает коэффициент мощности установки. Кроме того, увеличивается напряжение, приложенное к изоляции и коллекторным пластинам, а также уровень пульсаций выпрямленного тока.
Эти обстоятельства побуждают принимать малый запас, что приводит к «размыканию» системы управления из-за ограниченной линейности преобразователя и неконтролируемой просадке скорости. Эти режимы возможны при напряжении, близком к номинальному напряжению двигателя и полной нагрузке. Поэтому, если запас по напряжению мал, надо ограничивать напряжение интегрирующего регулятора, управляющего преобразователем до величины, соответствующей полному открытию преобразователя.
22
8. Лабораторный практикум
Работа Г Исследование переходных процессов в контуре регулирования скорости с
П-регулятором
Цель работы: исследовать особенности работы контура регулирования скорости с П-регулятором, переходные процессы при пуске и реверсе.
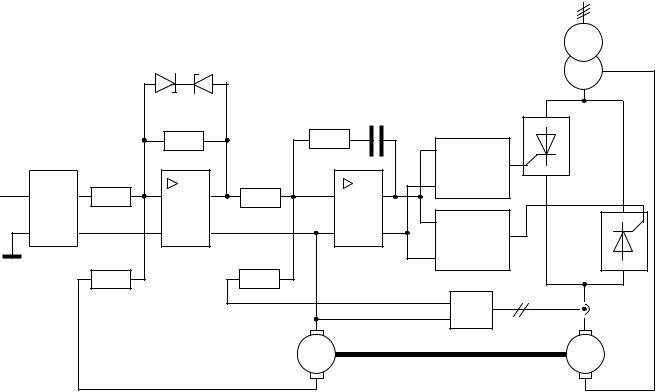
Программа выполнения работы Г1. Составление структурной схемы по принципиальной схеме
САР скорости
|
|
СТ1 СТ2 |
|
|
Тр |
|
|
|
|
|
|
Uзс |
|
Rосс |
Rост Сост |
|
ТП1 |
|
Rзс |
Rзт |
СИФУ |
||
|
|
||||
|
|
"В" |
|
||
|
ЗИ |
|
|
|
|
|
РС |
РT |
СИФУ |
|
|
|
|
|
|||
|
|
Rс |
Rт |
"H" |
ТП2 |
|
|
Uост |
ДТ |
|
|
|
|
|
Д |
||
|
|
Uосс |
ТГ |
|
|
|
|
|
|
|
|
Рис. Г-1. Принципиальная схема реверсивного электропривода с однократно-интегрирующей системой регулирования скорости
На рис. Г-1 изображена принципиальная схема САР скорости реверсивного электропривода с П-регулятором скорости. Двигатель постоянного тока Д получает питание от реверсивного тиристорного преобразователя (ТП1, ТП2), обмотка возбуждения ОВ - от преобразователя ТПВ (на схеме не показана). ПИ-регулятор тока собран на усилителе РТ. Сигнал обратной связи по току поступает с шунта на датчик тока ДТ и затем на суммирующий
23

вход регулятора тока РТ. П-регулятор скорости выполнен на усилителе РС. Выходное напряжение регулятора скорости ограничивается с помощью стабилитронов (СТ1, СТ2). Для формирования сигнала отрицательной обратной связи по скорости используется тахогенератор ТГ . Задатчик интенсивности ЗИ обеспечивает требуемый темп изменения скорости при пуске и торможении.
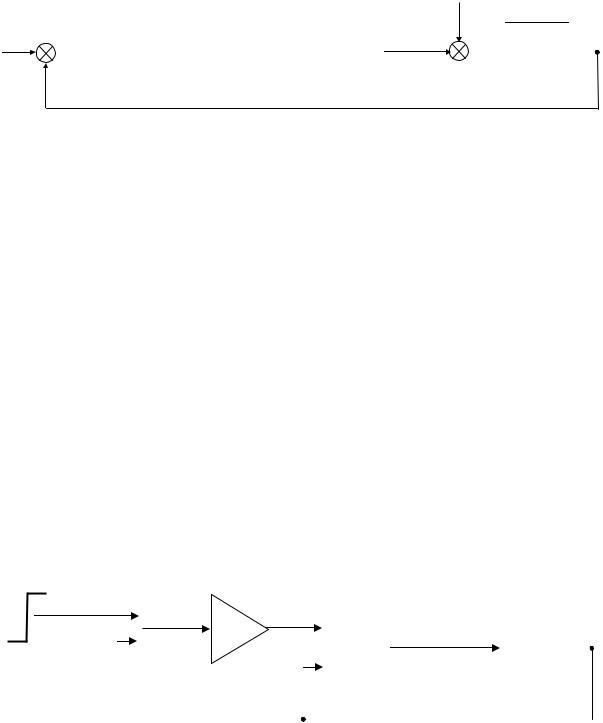
Структурная схема САР скорости, соответствующая принципиальной схеме рис. Г-1 показана на рис. Г-2. Контур тока изображен в свернутом виде. Предполагается, что внутренняя обратная связь по ЭДС двигателя компенсирована. Задатчик интенсивности на структурной схеме не показан.
|
|
|
|
|
K |
рс |
|
|
W з |
( р) |
|
I |
|
|
|
|
|
|
|
||||||
Uзс |
|
|
|
|
|
Uзт |
|
|
т |
|
|
|
I |
с |
|
|
|
ω |
|||||||
|
|
|
|
К Т |
|
СФ |
|
1 К |
т |
|
|
|
|
R |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
т м |
|
|
|
|
|
|
|
|
|
|
|
|
|
э |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
Ттр(Тµ р+1) +1 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
асТтRэКс |
|
|
|
|
|
|
|
|
ТмСФр |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Uосс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
Kc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. Г-2. Структурная схема однократно-интегрирующей САР скорости Для удобства моделирования и анализа результатов приведем
структурную схему контура скорости к системе относительных единиц.
Г2. Приведение структурной схемы САР скорости к системе относительных единиц
В дополнение к базовым единицам, принятым при исследовании контура тока, определим базовую скорость и базовый момент:
ωб= |
Uб |
= |
Uн |
=ωо, |
(Г-1) |
CФ |
CФ |
||||
|
б |
|
н |
|
|
Мб=Мн=CФнIн=CФбIб . |
(Г-2) |
||||
Определим базовые величины переменных в узлах сравнения схемы, задавшись единичными коэффициентами в цепях обратных связей.
Цепь обратной связи по скорости.
24
k |
= К |
|
ωб |
=1, U |
оссб |
= К ω |
=U |
зсб |
. |
(Г-3) |
|
сUосс |
|||||||||||
с |
|
|
с б |
|
|
|
|||||
|
|
|
б |
|
|
|
|
|
|
|
|
Это напряжение равно действительному выходному напряжению датчика скорости при скорости двигателя ω =ωо.
После расчета базовых величин определим передаточные функции элементов структурной схемы в относительных единицах.
1. Регулятор скорости.
kрс =Kрс |
Uзсб |
= |
СФбТм Кт × |
Ксωб . |
(Г-4) |
|
|||||
|
Uзтб |
4ТµRэ Кс |
Кт Iб |
|
|
Учитывая, что ωб = Uб , получим:
CФб
kрс = |
СФбТм × |
|
Uб |
|
= |
|
Тм |
. |
|
|
|
|
(Г-5) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
4ТµRэ |
|
CФб Iб |
|
|
4Тµ ρэ |
|
|
|
|
|||||||||||||
2. Контур регулирования тока. |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
wз ( р) =W |
з( р) |
Uзтб |
= |
|
|
|
|
1 Кт |
|
× Кт Iб = |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
т |
|
|
т |
|
Iб |
|
|
Ттр(Тµ р+1) +1 |
Iб |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
= |
|
|
|
|
|
|
1 |
|
|
|
|
. |
|
|
|
|
|
|
|
|
(Г-6) |
|
|
|
Ттр(Тµ р+ |
1) +1 |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
3. Двигатель. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Rэ |
|
|
× |
|
Iб |
= |
|
|
Rэ |
|
|
× |
Iб СФб |
= |
|
ρэ |
. |
(Г-7) |
|||||
|
ТмСФбр |
|
|
ТмСФб р |
|
|
|
|||||||||||||||||
|
|
ωб |
|
|
Uб |
Тмр |
|
|||||||||||||||||
Значение электромеханической постоянной времени Тм принимается на
основании расчетов параметров объекта регулирования (приложение 4 /7/)
На рис. Г-3 изображена структурная схема системы автоматического регулирования скорости в относительных единицах, соответствующая структурной схеме на рис. Г-2.
25
|
|
|
|
kрс |
|
|
з |
( р) |
|
|
|
|
|
|
|
|
|
||
uзс |
|
|
|
uзт |
|
wт |
i iс |
|
ρэ |
|
υ |
||||||||
|
|
|
Тм |
1 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
Ттр(Тµ р+1) +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4Тµ ρэ |
|
|
|
|
|
|
|
Тмр |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Рис. Г-3. Структурная схема однократно-интегрирующей САР скорости в относительных единицах
Г3. Расчет параметров структурной схемы САР скорости
На основании уравнений (Г-4) – (Г-7) рассчитать численные значения передаточных функций элементов структурной схемы (рис. Г-3):
•регулятора скорости,
•замкнутого контура тока,
•двигателя.
Варианты заданий для выполнения работы приведены в приложении 1.
Г4. Исследование переходных процессов при пуске двигателя без нагрузки
Г4.1. Определить параметры типовых блоков SIMULINK, соответствующих структурной схеме модели, изображенной на рис. Г-4.
|
|
|
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
uзс =1 |
|
|
|
|
kрс |
uзт |
|
wт( р) |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
In1 |
|
i |
|
ρэ |
υ |
|||
|
|
|
|
|
|
|
|
|
|
|
In2 Out1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тмр |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
PI −current |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. Г-4. Структурная схема модели контура скорости без ограничения задания на ток якоря
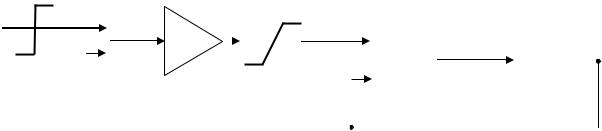
Для моделирования контура регулирования тока якоря создать подсистему на основании модели контура тока с ПИ-регулятором и внутренней обратной связью по ЭДС двигателя. Для создания подсистемы воспользоваться схемой модели, изображенной на рис. В-6,б /7/. Подсистема (рис. Г-5) должна
26
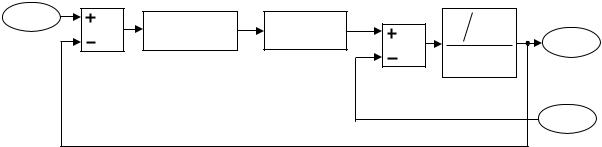
иметь два входа (по заданию и по ЭДС двигателя) и один выход (по току). Подсистеме регулирования тока присвоить имя PI −current .
uзт |
uрт |
еd |
|
|
|
i |
1 |
wрт(p) |
|
ρ |
|
||
In1 |
wпр(р) |
1 |
|
э |
1 |
|
|
|
|
Тэр+1 |
Out1 |
||
|
|
|
|
едв |
2 |
|
|
|
|
|
|
|
|
Рис. Г-5. Структурная схема модели подсистемы регулирования тока якоря
Г4.2. Выбрать время интегрирования так, чтобы переходные процессы практически закончились (пятикратное значение коэффициента при p в
первой степени в характеристическом уравнении замкнутого контура скорости).
Г4.3. Выполнить моделирование с выводом на одном графике задания на скорость, тока, скорости.
Г4.4. Определить характеристики переходной функции скорости: перерегулирование δ , время первого достижения установившегося значения tн, время достижения первого максимума tм1 , время регулирования tр . По
кривой i(t) рассчитать форсировку по току, необходимую для реализации настройки контура скорости на модульный оптимум.
Г4.5. Проанализировать полученные результаты, сделать выводы.
Г5. Исследование переходных процессов при пуске и реверсе двигателя без нагрузки (выход регулятора скорости ограничен)
Г5.1. Рассчитать параметры типовых блоков SIMULINK, соответствующих структурной схеме модели, изображенной на рис. Г-6. Пуск двигателя осуществляется до скорости υ1. Регулятор скорости должен
ограничивать ток при пуске и торможении на уровне imax .
27
|
uзс |
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
kрс |
|
|
|
|
u |
зт |
wт( р) |
|
i |
|
|
|
|
υ |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
In1 |
|
|
ρэ |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
In2 Out1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тмр |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PI −current |
|
|
|
|
|
|
|
|
|
|
Рис. Г-6. Структурная схема модели контура скорости с ограничением задания на ток якоря (пуск и реверс без нагрузки)
Г5.2. Определить:
• время пуска двигателя до установившейся скорости υ1
t |
п |
= |
Тмυ1 |
, |
(Г-8) |
|
|||||
|
|
ρэimax |
|
||
• время работы с установившейся скоростью |
|
||||
t р = 2tп, |
(Г-9) |
||||
• |
время торможения до скорости υ = 0 |
|
|||
tт =tп, |
(Г-10) |
||||
•время пуска двигателя до установившейся скорости −υ1 по формуле
(Г-8),
•время моделирования
tм =tп +t р +tт +tп. |
(Г-11) |
Г5.3. Выполнить моделирование с выводом на одном графике задания на скорость, тока, скорости.
Г5.4. По графикам определить:
•время пуска,
•время торможения,
•ток якоря при пуске,
•ток якоря при торможении,
•ток якоря в установившемся режиме.
Г5.5. Сравнить расчетные значения tп, tт с результатами
моделирования.
Г5.6. Проанализировать полученные результаты, сделать выводы.
28
Г6. Исследование переходных процессов при пуске и реверсе двигателя под нагрузкой (выход регулятора скорости ограничен)
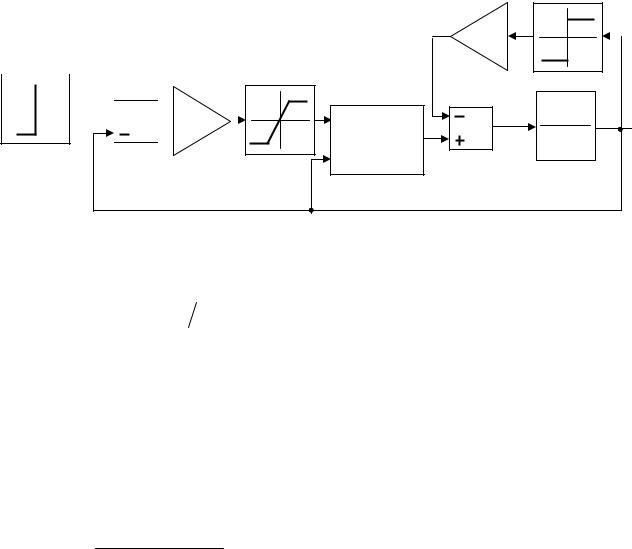
Г6.1. Рассчитать параметры типовых блоков SIMULINK, соответствующих структурной схеме модели, изображенной на рис. Г-7.
Пуск двигателя осуществляется до скорости υ1. Регулятор скорости должен ограничивать ток при пуске и торможении на уровне imax .
Signum
 uзс
uзс

 kрс
kрс
uзт з |
|
ic |
|
|
i |
iс |
|
υ |
|
wт( р) |
|
ρэ |
||
In1 Out1 |
|
|||
Т |
р |
|
||
In2 |
|
м |
|
|
|
|
|
|
|
PI −current |
|
|
||
Рис. Г-7. Структурная схема модели контура скорости с ограничением задания на ток якоря (пуск и реверс под нагрузкой)
Задание на статический ток определяется моментом нагрузки:
iс = µс = Мс1 Мн. |
(Г-12) |
Поскольку момент нагрузки пассивный, то для его задания используются блок Signum (блок выделения знака) и усилитель с коэффициентом усиления численно равным статическому току ic. Блок Signum обеспечивает
соответствие знака момента нагрузки знаку скорости. Г6.2. Определить:
• время пуска двигателя до установившейся скорости υ1
tп = ρ (iТмυ1−i ) , э max c
• время работы с установившейся скоростью
t р = 2tп,
• время торможения до нулевой скорости υ = 0
(Г-13)
(Г-14)
29
t |
т |
= |
Тмυ1 |
, |
(Г-15) |
ρэ(imax +ic) |
|||||
|
|
•время пуска двигателя до установившейся скорости −υ1 по формуле
(Г-13),
•время моделирования
tм =tп +t р +tт +tп, |
(Г-16) |
|||||||
• статическую ошибку регулирования скорости |
|
|||||||
υ |
с |
= |
µсρэ |
а Т |
, |
(Г-17) |
||
|
||||||||
∆ |
|
|
Тм |
с т |
|
|
||
• |
естественный статизм привода |
|
||||||
∆υе = µсρэ. |
|
|
(Г-18) |
|||||
Г6.3. Задать следующие параметры моделирования (Simulation parameter)
вразделе разрешенные опции (Solver option):
•Интегрирование с постоянным шагом (Fixed-step),
•Способ моделирования – ode2(Heun),
•Шаг интегрирования (Fixed step size) – 0.001 с.
Данное решение обусловлено особенностями моделирования момента статической нагрузки.
Выполнить моделирование с выводом на одном графике задания на скорость, тока, скорости.
Г6.4. По графикам определить:
•время пуска,
•время торможения,
•статическую ошибку по скорости,
•ток якоря при пуске,
•ток якоря при торможении,
•ток якоря в установившемся режиме.
Г6.5. Сравнить расчетные значения tп, tт, ∆υс, ∆υе с результатами
моделирования.
Г6.6. Проанализировать полученные результаты, сделать выводы.
30