

СКЕ_1 / Модуль4. Регулирование ЭДС и положения электропривода
.pdfКрп = |
|
|
Кс 4Mтах |
|
× |
Мтах + Мс |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
К |
п |
|
|
|
C JS |
з |
|
М |
тах |
− |
М |
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
Кс |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
= |
|
|
|
4 Мтах (Мтах |
− М |
с) × Mтах + Mс = |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
Кп |
|
|
|
|
|
|
|
2 |
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mтах − Mс |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
СпJ |
ωн Mтах |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
Kс |
|
|
|
2(Mтах + Mс) |
|
1 |
|
|
|
|
Kс |
|
|
|
|
2Mтах |
|
|
Mс |
|
1 |
|
||||||||||||||||||||||||||||||
|
= |
|
|
|
|
× |
|
|
|
|
|
|
|
|
|
|
|
|
|
× |
|
|
|
|
= |
|
|
|
|
|
× |
|
|
|
|
1 |
+ |
|
|
|
|
|
|
= |
|||||||||||
|
K |
п |
|
|
|
|
|
Jω |
н |
|
|
|
|
|
C |
п |
|
K |
п |
|
Jω |
н |
|
|
M |
|
|
C |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тах |
п |
||||||||||||||
|
|
Kс |
|
|
|
2IтахСФ |
|
|
|
|
Iс |
|
|
|
|
|
|
|
Kс |
|
|
|
|
|
2IтахRэ |
|
|
|
Iс |
|
|
. (10-31) |
|||||||||||||||||||||||
= |
|
|
|
|
× |
|
|
|
|
|
|
1+ |
|
|
|
|
|
|
= |
|
|
|
|
|
× |
|
|
|
|
|
1 |
+ |
|
|
|
|
|||||||||||||||||||
|
K |
п |
|
|
Jω |
н |
C |
I |
|
|
|
|
|
K |
п |
T |
|
CФω |
C |
|
I |
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
тах |
|
|
|
|
|
|
|
|
|
м |
|
н п |
|
|
|
тах |
|
|
|||||||||||||||||||||
Все |
|
перемещения, |
|
|
меньшие |
настроечного ( Sз), |
отрабатываются с |
||||||||||||||||||||||||||||||||||||||||||||||||
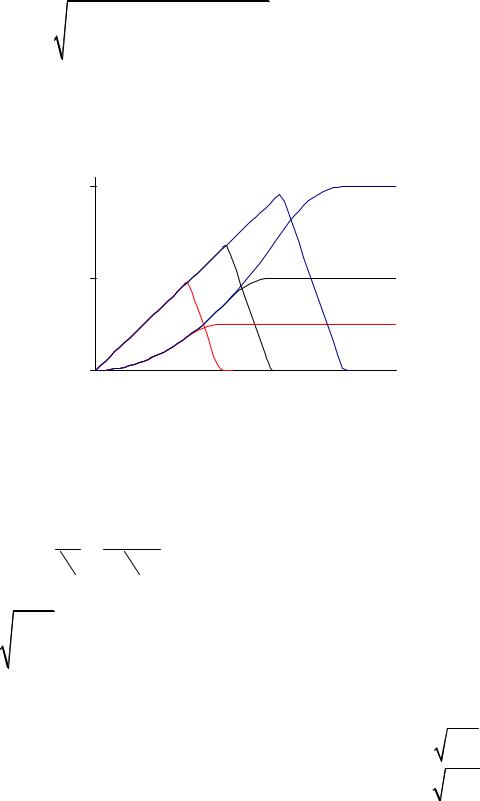
дотягиванием (рис. 10.7), но перерегулирования, нежелательного в системах позиционирования, не будет.
Перемещения, превышающие настроечное, относятся к большим. После достижения двигателем номинальной скорости рассогласование на входе регулятора положения еще достаточно велико, чтобы РП не вышел из ограничения. Средняя часть перемещения отрабатывается с постоянной, равной номинальной, скоростью и график скорости имеет вид трапеции (рис. 10.7).
о.е. |
|
s3 з > sопт |
|
1.0 |
ω2 |
ω3 |
|
|
|||
0.5 |
ω1 |
s2з = sопт |
|
s1з < sопт |
|||
|
|
||
0.0 |
|
t |
|
|
|
||
Рис. 10.7. Отработка средних и больших перемещений ( Мс = Мн) |
|||
10.3. Параболический регулятор положения |
|||
При отработке средних перемещений требуемый коэффициент усиления РП зависит от величины задания на положение. В результате этого перемещения, меньшие настроечного отрабатываются с дотягиванием, большие настроечного – с перерегулированием.
21
Близкий к треугольному график скорости при любом, отличном от настроечного, значении перемещения можно получить при использовании РП с параболической характеристикой, воспроизводящей уравнения (10-22):
Крп = |
Кс |
|
4М |
тах |
× |
М |
тах + Мс |
. |
(10-32) |
||||
К |
п |
|
С |
JS |
з |
М |
тах |
− М |
с |
||||
|
|
|
п |
|
|
|
|
|
|
||||
В этом |
случае графики отработки |
различных |
перемещений подобны |
||||||||||
(рис. 10.8), а |
времена |
их |
отработки (при Мс = 0) |
относятся как корни |
|||||||||
квадратные из заданных величин.
о.е. |
|
s3 |
|
2 |
|
|
|
|
ω2 |
ω3 |
|
1 |
s2 |
||
ω1 |
s1 |
||
|
|||
|
|
||
0 |
|
t |
|
|
|
Рис. 10.8. Отработка средних перемещений параболическим регулятором
положения ( Мс = Мн) |
|
|
|
|
|
|
|
|
|
|
|
|
||||
При |
|
Мс = 0 пути, пройденные при разгоне и |
торможении привода, |
|||||||||||||
равны: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S р |
= Sт = Sз = |
Cпε t2р. |
|
|
|
|
|
|
(10-33) |
|||||||
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
||
Время регулирования: |
|
|
|
|
|
|
|
|
|
|
|
|||||
t p = |
|
Sз |
|
|
|
|
|
|
|
|
|
(10-34) |
||||
|
Cпε . |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Sз |
|
||
В соответствии с уравнением (10-34) для двух перемещений Sз и |
2 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
||
времена регулирования |
t р |
и |
t р |
соотнесутся как |
|
t р1 |
= |
Sз1 |
, что и |
|||||||
|
|
|
|
|
1 |
|
2 |
|
t р |
|
S |
з2 |
|
|
||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|||
требовалось доказать.
22
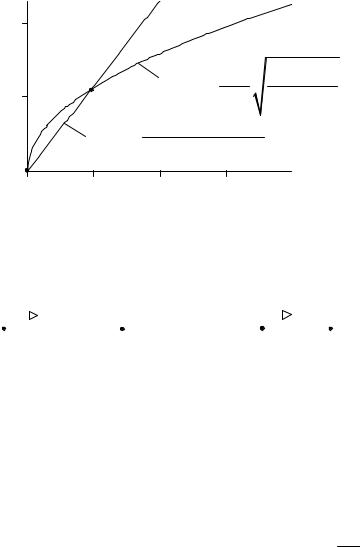
Преобразователь с соответствующей нелинейной характеристикой (рис. 10.9, кривая ОАВ) должен включаться в цепь обратной связи регулятора положения или в контур регулирования положения (рис. 10-10).
u рп |
|
|
|
|
|
В |
|
2 |
|
|
|
|
|
|
|
|
А |
Крп = |
Кс |
4Мтах |
|||
1 |
К |
п |
С JS |
з |
|||
|
|
Kс |
|
|
п |
||
|
|
|
|
K |
|
|
|
|
Kрп= a a T C |
п |
п |
|
|||
О |
|
п с т |
|
|
|
||
|
|
|
|
|
uзп |
|
|
0 |
0.1 |
0.2 |
0.3 |
|
|||
Рис. 10.9. Характеристика регулятора положения |
|
||||||
|
|
|
|
|
|
Rосс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rосс |
||||||||||||
|
|
|
Rзп |
|
|
|
ФП |
|
|
|
|
|
|
Rзп |
|
||||||||||||||||||
|
uзп |
|
|
|
|
|
|
|
|
u рп uзп |
|
|
|
|
|
|
|
|
|
|
|
u рп |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
РП |
|
|
|
|
|
|
|
|
РП |
|
|
|
|
ФП |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
uосп |
Rп |
|
|
|
|
|
|
|
|
|
uосп |
Rп |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 10.10. Схемы включения функционального преобразователя в регуляторе положения
При uзп −uосп → 0 коэффициент усиления регулятора положения теоретически должен стать бесконечно большим (при малых значениях
аргумента наклон касательной к параболе стремится к π , а dy → ∞). Попытка
2 dx
использования характеристики (10-32) привела бы к неустойчивости системы в согласованном положении. Чтобы избежать этого участок ОА характеристики РП делают линейным. Угол наклона определяется коэффициентом усиления РП, соответствующим настройке контура положения на модульный оптимум:
K рп = |
Kс |
|
. |
(10-35) |
|
a a T |
C K |
|
|||
|
п с т |
п |
п |
А (рис. 10.9). |
|
В результате получается характеристика с изломом в точке |
|||||
Точке сопряжения соответствует провал в кривой тока.
При малых рассогласованиях на входе РП (линейный участок ОА кривой ОАВ) контур положения настроен на модульный оптимум. В связи с этим
23
отработка заданного перемещения может происходить с перерегулированием по положению. Перерегулирование может быть недопустимо по технологии работы привода или нежелательно из-за увеличения времени регулирования и ударов при выборе люфтов в механической части привода. Для исключения перерегулирования Крп должен быть уменьшен так, чтобы после вхождения в
зону линейного участка траектории движения система попадала в точку нулевого рассогласования.
10.4. Установившаяся ошибка по положению
Для определения статической ошибки по положению определим передаточную функцию системы позиционирования по возмущению. Предполагается, что регуляторы скорости и положения пропорциональные.
uзп |
uзс |
uзт |
1 |
К |
i |
iс |
|
|
R |
ω |
S |
|
|
|
|
т |
|
|
|
э |
С |
||||
|
Крп |
Крс |
Т |
|
|
|
|
|
|
п |
||
|
|
р +1 |
|
Т |
м |
СФр |
р |
|||||
|
|
uосс |
т |
|
|
|
|
|
|
|
||
|
|
|
|
|
Кс |
|
|
|
|
|
|
|
|
uосп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Кп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
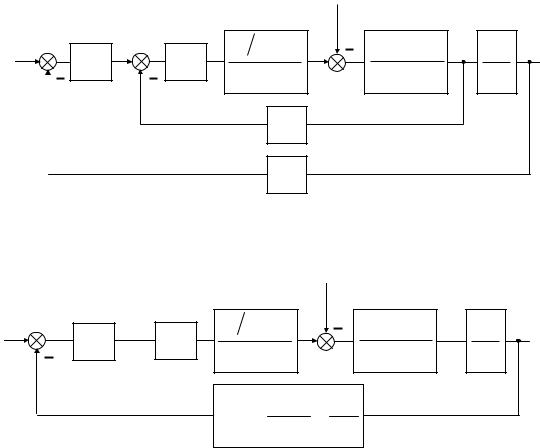
Рис. 10.11. Структурная схема системы регулирования положения Перенесем обратную связь по скорости через регулятор положения и
интегратор. Преобразованная структурная схема изображена на рис. 10.12.
uзп |
uзт |
1 К |
|
i |
|
iс |
|
R |
|
ω |
S |
|
|
|
т |
|
|
|
э |
|
С |
||||
Крп |
Крс |
Т |
|
|
|
|
|
|
п |
|||
р +1 |
|
Т |
м |
СФр |
|
р |
||||||
uосп |
|
т |
|
|
|
|
|
|
|
|
|
|
|
Кп |
+ |
Кс |
× |
р |
|
|
|
|
|
||
|
|
Крп |
Сп |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 10.12. Преобразованная структурная схема системы регулирования положения
Передаточная функция системы регулирования по возмущению:
24
|
|
|
|
|
|
|
|
|
S (p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rэ |
|
× |
|
Сп |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
W |
в(р) |
= |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
м |
СФр |
|
|
р |
|
|
|
|
|
|
|
|
|
= |
||||||||||||||||||||||
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
п |
|
|
|
|
|
c(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 Кт |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 + |
Т |
|
Rэ |
|
|
× |
Сп |
|
Кп+ |
Кс |
× |
|
р |
КрпКрс |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
СФр |
|
|
р |
|
|
|
|
|
К |
рп |
|
Сп |
|
|
|
|
Тт |
р+1 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RэСп |
|
|
|
ТмСФр2 Кт(Ттр +1) |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ТмСФ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|||||||||
|
Т |
|
|
|
СФр |
2 |
К |
|
|
(Т |
|
р +1) + |
|
|
|
|
|
|
|
|
|
+ |
|
|
Кс |
× |
|
р |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
R С |
|
|
К |
|
|
|
|
|
|
|
|
|
К |
|
К |
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
т т |
|
|
|
|
|
|
|
|
|
|
|
п |
|
К рп |
|
|
Сп |
рп |
рс |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
э |
п |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
С |
п |
К |
т |
(Т |
|
т |
р |
+1) |
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|||||||||
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
э |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
Т |
|
|
|
СФр |
2 |
К |
|
|
(Т |
|
|
р+1) + |
|
|
|
|
|
|
|
+ |
|
|
К |
с |
|
× |
|
р |
|
|
|
|
|
|
|
|
(10-36) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
R |
С |
|
|
К |
|
|
|
|
|
|
|
|
|
|
К |
|
К |
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
т т |
|
|
|
|
|
|
|
|
п |
п |
|
|
Крп |
|
|
|
Сп |
рп |
рс |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
э |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
По окончании переходного процесса передаточная функция по |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
возмущению примет вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
в |
(0)= |
|
S (0) |
= |
|
|
|
|
|
RэСп Кт |
|
|
|
|
|
|
|
|
|
Кт |
|
|
. |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
Wп |
ic (0) |
RэСп КпК рпК рс |
= КпК рпК рс |
|
|
|
|
|
|
(10-37) |
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Ошибка регулирования положения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
∆S = i |
|
|
|
|
|
|
|
|
Кт |
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(10-38) |
||||||||||||||
|
c Кп |
К рп |
К рс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
Учитывая, что |
|
|
К |
рс |
|
= |
|
|
Кт |
Т м |
СФ |
, |
оценим |
|
ошибку регулирования |
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
асТтRэКс |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
положения при линейном и параболическом регуляторах.
10.4.1. Линейный регулятор положения
Коэффициент усиления регулятора положения
K рп = |
Kс |
|
. |
|
|
|
(10-39) |
|
a a T |
C K |
|
|
|
|
|||
|
п с т |
п |
п |
|
|
|
|
|
Ошибка регулирования положения: |
|
|
|
|
||||
|
Кт апасТтСп Кп асТт RэКс |
= |
Ic Rэ |
2 |
2 |
|||
∆S = I c |
Кп Кс Кт ТмСФ |
ТмСФ |
СпапасТт = |
|||||
|
|
|
|
|
||||
25

|
М |
с |
R |
э |
2 2 |
2 |
2 |
|
|
= |
|
|
СпапасТт = Мc СпапасТт . |
(10-40) |
|||||
ТмС2Ф2 |
|||||||||
|
|
J |
|
|
|||||
10.4.2. Параболический регулятор положения
Коэффициент усиления регулятора положения
Крп = |
Кс |
|
4Мтах |
. |
|
|
|
|
|
(10-41) |
||
Кп |
СпJ S з |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
||||||
Ошибка регулирования положения: |
|
|
|
|
||||||||
∆S = I c |
Кт |
асТт RэКс |
× |
Кп |
С |
п |
JS |
з = |
||||
Кп |
Кт ТмСФ |
Кс |
|
|
||||||||
|
|
|
4M тах |
|||||||||
= |
|
Ic Rэ |
а |
Т |
|
СпJ S з |
= |
МсRэ |
а Т |
СпJ S з |
= |
|
|
|
ТмСФ |
с т |
4Мтах |
|
Т С2Ф2 |
с т |
|
||||
|
|
|
|
|
|
|
4Мтах |
|
||||
|
|
|
|
|
|
|
|
|
м |
|
|
|
= |
Мc асТт |
|
СпJ S з |
. |
|
|
|
|
(10-42) |
|||
|
|
|
|
|
|
|||||||
|
|
J |
|
|
4Мтах |
|
|
|
|
|
||
Для ликвидации статизма по нагрузке контур скорости выполняется с ПИрегулятором. С целью уменьшения ошибки при слежении, применяют двукратно интегрирующую систему регулирования положением.
10.5. Особенности работы контура положения, обусловленные инерционностью контура тока и ограниченным коэффициентом усиления регулятора скорости
Поскольку скорость при отработке перемещения нарастает и спадает с постоянным ускорением, определяемым уровнем ограничения РС, то качество позиционирования зависит от характера переходных процессов в трех точках:
•пуск двигателя, насыщение регулятора скорости;
•переход от разгона к торможению;
•выход регулятора скорости из насыщения в конце торможения.
На величину перерегулирования наиболее сильно влияет переход от разгона к торможению. Несвоевременное начало торможения приводит к апериодическому или колебательному процессу выхода на заданное
26
перемещение. Ситуация осложняется тем, что в реальной системе переход от разгона к торможению происходит не мгновенно по двум причинам: в силу ограниченной величины коэффициента усиления РС и вследствие инерционности контура тока.
Рассмотрим процесс пуска и перехода к торможению при отработке перемещения по треугольной тахограмме с учетом инерционности контура тока.
Пусть передаточная функция замкнутого контура тока:
W з |
(р)= |
|
|
|
1 |
|
|
. |
|
|
(10-43) |
||||
Ттр+ |
|
|
|
||||||||||||
т |
|
|
|
1 |
|
|
|
|
|
||||||
После подачи задающего напряжения на вход РП последний своим |
|||||||||||||||
выходным сигналом насыщает РС. Ускорение возрастает по закону: |
|
|
|
||||||||||||
|
|
|
|
|
|
− |
t−τ1 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
, |
|
|
|
||||
ε = εmax |
−e |
Тт |
|
|
|
||||||||||
1 |
|
(10-44) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где τ ≈Т |
т |
М |
с |
|
М |
тах |
|
- время нарастания момента двигателя от нуля до М |
с |
. |
|||||
1 |
|
|
|
|
|
|
|
|
|
|
|||||
Скорость вращения при этом:
|
|
|
|
|
|
t−τ |
1 |
|
|
|
|
|
|
|
t−τ |
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
t |
|
t |
|
− |
|
|
|
|
|
|
|
− |
1 |
|
|
||
ω = |
ε dt = |
−e |
Тт |
ε |
|
t + ε |
|
Tт |
||||||||||
∫ |
1 |
|
dt = |
|
тах |
тах |
T e |
|
|
= |
||||||||
|
|
∫ |
|
|
|
|
|
|
|
т |
|
|
|
|||||
|
о |
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
t−τ1 |
|
τ1 |
|
|
T |
|
T |
|
= εтахt+ εтахTтe т |
− εтахTтe т . |
|||
τ1
Приняв в первом приближении eTт =1 + Tτт1 , получим:
− |
t−τ |
1 |
|
|
|
||
T |
|
|
|
ω = εтах[t −(τ1 + Tт)]+ εтахTтe |
т . |
||
(10-45)
(10-46)
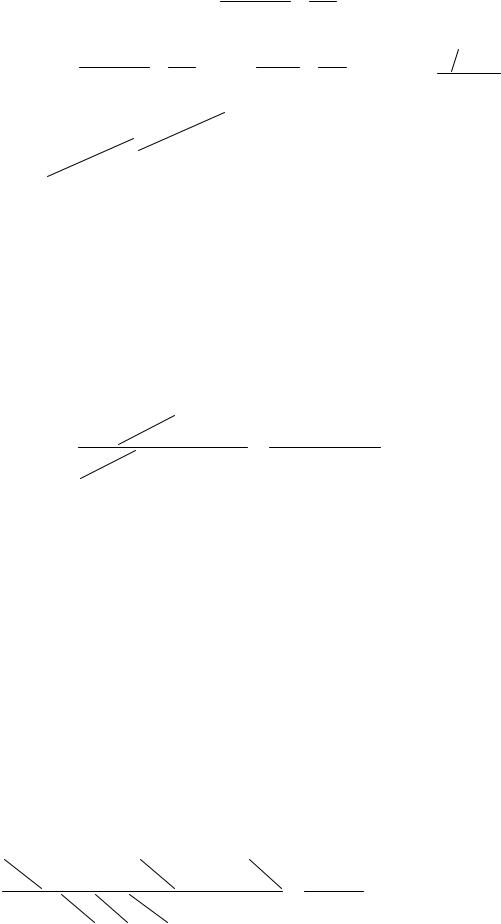
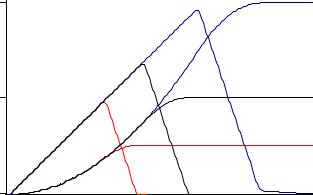
При t > (3 ÷4)Tт ускорение достигает установившегося значения, а
скорость изменяется по прямой 2 (рис. 10.13), сдвинутой вправо от начала координат на время τ1 +Tт.
27
|
о.е. |
sз |
ω |
|
2 |
|
|
|
|||
|
1.0 |
|
|
2 |
|
|
1 |
|
|
3 |
|
|
|
2,3 |
s |
||
|
0.5 |
|
|
3 |
|
|
1 |
|
|
1 |
|
|
|
2,3 |
|
||
|
|
|
|
||
|
|
|
|
|
|
|
0.0 |
τ1 +Тт |
|
|
t |
Рис. 10.13. Отработка среднего перемещения ( Мс = Мн): |
|||||
1- регулятор тока безинерционный; |
|
|
|||
2- |
учтена инерция контура |
тока, |
Крп настроен на отрабатываемое |
||
|
перемещение; |
|
|
|
|
3- |
учтена инерция контура тока, Крп уменьшен |
||||
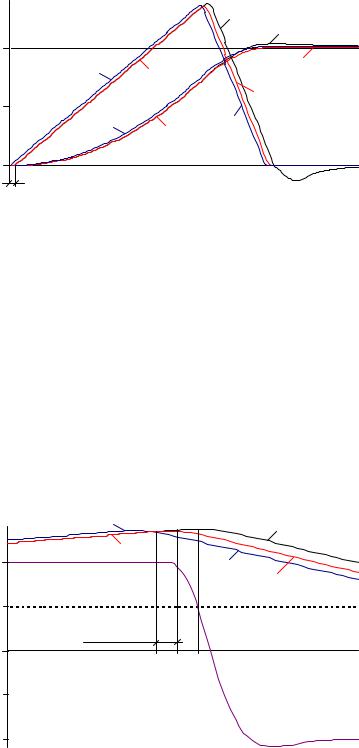
РС выйдет из насыщения практически при той же скорости, что и при |
|||||
безинерционном контуре тока, но позднее, |
в момент времени t2 = t1 +τ1 +Tт |
||||
(рис. 10.14). Однако из-за инерции контура тока торможение начнется лишь в |
|||||
момент |
t3 (рис. 10.14), когда момент (ток) двигателя станет меньше |
||||
статического момента. |
|
|
|
||
|
о.е. |
|
1 |
ω |
2 |
|
|
|
|
2,3 |
|
|
|
||
|
1.0 |
|
|
1 |
|
|
|
|
|
|
|
|
|
||
|
|
iс |
|
|
3 |
|
|
|
0.5 |
+Тт |
|
|
|
|
|
|
τ1 |
|
|
|
|
||
|
0.0 |
|
|
|
|
||
|
|
|
t1 t2 t3 |
t |
|
||
|
-0.5 |
|
|
|
|||
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
-1.0 |
|
|
|
|
( Мс = Мн), |
|
Рис. |
10.14. |
Отработка |
среднего |
перемещения |
увеличен |
||
масштаб на участке перехода от разгона к торможению: |
|
|
|||||
1- регулятор тока безинерционный;
2- учтена инерция контура тока, Крп настроен на отрабатываемое
перемещение; 3 - учтена инерция контура тока, Крп уменьшен
28
Скорость, с которой начнется торможение, больше, чем в идеальной системе. Так как замедление при торможении в обеих системах равно (M тах + Mc) J , то в момент достижения приводом заданного положения
J , то в момент достижения приводом заданного положения
скорость отлична от нуля (рис. 10.13). Неизбежным следствием этого будет перерегулирование по положению.
Для устранения этого явления надо начинать торможение раньше, чтобы происходило одновременное обнуление рассогласования по положению и скорости при выходе на заданное перемещение. Один из путей достижения этого – снижение коэффициента усиления регулятора положения. В этом случае при том же рассогласовании по положению задание на скорость уменьшится и, соответственно, уменьшится скорость, с которой начнется торможение (кривая 3 на рис. 10.13, 10-14).
Переходные процессы в системе регулирования положения со сниженным коэффициентом усиления приведены на рис. 10.13 (линейный РП) и рис. 10.15 (параболический РП).
|
о.е. |
|
|
|
s3 |
|
|
|
|
2 |
|
|
ω3 |
|
|
|
|
|
|
|
|
|
|
|
||
|
1 |
|
ω |
2 |
s2 |
|
|
|
|
ω1 |
|
|
|
|
|
||
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
0 |
|
|
|
|
t |
|
|
Рис. 10.15. Отработка средних перемещений параболическим |
||||||||
регулятором |
положения |
(учтена |
инерция |
контура |
тока, |
Крп |
уменьшен, |
|
Мс = Мн)
Степень снижения коэффициента усиления РП аналитическому расчету не поддается и должна определяться путем моделирования или при наладке электропривода.
29
11. Лабораторный практикум
Работа Е Исследование переходных процессов в системе регулирования скорости с
обратной связью по ЭДС двигателя
Цель работы: исследовать особенности работы контура регулирования ЭДС двигателя, переходные процессы при пуске и реверсе.
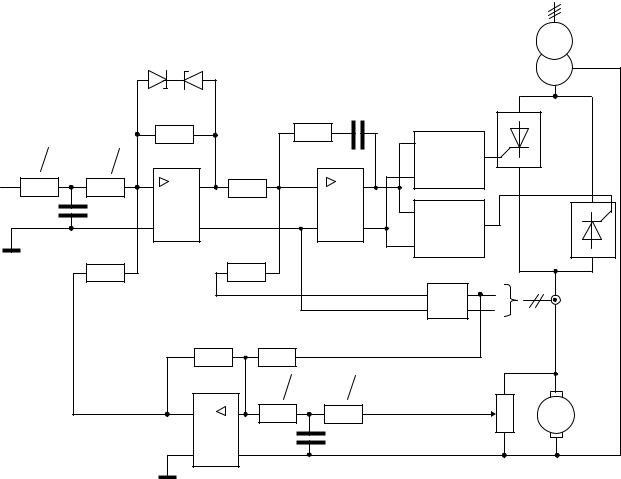
Программа выполнения работы Е1. Составление структурной схемы по принципиальной схеме САР скорости
|
СТ1 СТ2 |
|
|
|
Тр |
|
|
|
|
|
|
||
U |
Rосэ |
U |
Rост Сост |
|
|
|
зс |
|
|
зт |
|
СИФУ |
ТП1 |
Rзэ 2 |
Rзэ 2 |
Rзт |
|
|||
|
|
|||||
|
"В" |
|
||||
|
|
|
|
|
|
|
Сзэ |
РЭ |
|
Rт |
РT |
СИФУ |
ТП2 |
|
Rэдс |
|
|
"H" |
||
|
Uост |
|
|
|
ДТ |
|
|
Rдэ Rтк |
|
|
|||
|
Uосэ |
|
Rн 2 Rн 2 |
|
Rд |
|
|
|
|
Сн |
rд |
Д |
|
|
ДЭ |
|
||||
|
|
|
|
|
||
Рис. Е-1. Принципиальная схема реверсивного электропривода с одно- кратно-интегрирующей САР скорости с обратной связью по ЭДС двигателя
На рис. Е-1 изображена принципиальная схема САР скорости с обратной связью по ЭДС двигателя и П-регулятором ЭДС. Двигатель постоянного тока Д получает питание от реверсивного тиристорного преобразователя (ТП1, ТП2), обмотка возбуждения ОВ - от преобразователя ТПВ (на схеме
30