

СКЕ_1 / Модуль4. Регулирование ЭДС и положения электропривода
.pdf10. Регулирование положения
Системы регулирования положения широко применяются в различных промышленных установках и роботах, в качестве систем наведения антенн и радиотелескопов, для стабилизации платформ в условиях качки оснований и т.п. Мощность исполнительных двигателей составляет от единиц и десятков ватт до десятков и сотен киловатт. Контроль положения осуществляется датчиками, которые в аналоговой или дискретной форме дают информацию о перемещении рабочего органа механизма на протяжении всего пути. В качестве датчиков используются сельсины, вращающиеся трансформаторы, импульсные и цифровые датчики.
Электроприводы, используемые для регулирования положения, реверсивные и должны обеспечивать точную остановку и автоматическое ограничение момента при перегрузках.
10.1. Описание системы
Во многих случаях системы управления положением строятся по принципам подчиненного регулирования при питании двигателей постоянного тока от тиристорных преобразователей. Контуры тока и скорости выполняются, как это было описано ранее.
uзп |
uзс |
|
|
|
uзт |
|
|
|
|
|
|
|
|
|
|
|
|
i |
i |
c |
|
|
ω S |
|||||||||||
|
|
|
|
|
|
|
|
|
Кпр |
|
1/ Rэ |
|
|
|
|
Rэ |
|
|
|
Cп |
|
|
||||||||||||
|
|
|
Wрп |
|
|
|
|
Wрс |
|
|
|
|
Wрт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Тµ р +1 |
× |
Тэр +1 |
|
|
|
|
|
|
ТмСФр |
|
|
|
р |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
uост |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
uocc |
|
|
|
Кт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
uосп |
|
|
|
|
|
|
|
Кс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
Кп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
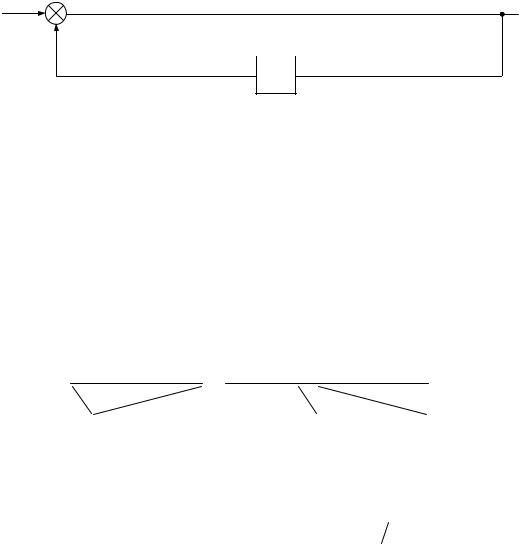
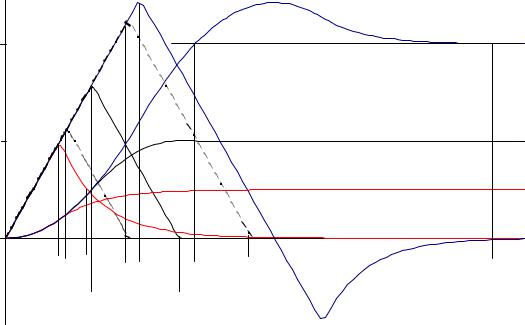
Рис. 10.1. Обобщенная структурная схема системы регулирования положения
Объект регулирования контура положения содержит, кроме подчиненного оптимизированного контура скорости, интегрирующее звено (перемещение - интеграл от скорости) и датчик положения. Предполагается, что контур скорости настроен на модульный оптимум. Коэффициент Сп
11
связывает угол поворота вала двигателя (в радианах) с выходной координатой и включает в себя как переводной коэффициент в угловую либо линейную меру, так и коэффициент силового передаточного звена.
Регулятор положения (РП) в общем случае совмещает функции ограничения предельного уровня задания скорости и нелинейного преобразования сигнала рассогласования по положению.
Позиционирование – режим работы системы управления положением, при котором задачей системы является перемещение рабочего органа механизма из одного фиксированного положения в другое. Характер траектории перемещения важен лишь постольку, поскольку он обеспечивает минимальное время перемещения (максимальную производительность) механизма, без сколько-нибудь значительного перерегулирования по положению.
Взависимости от величины начального рассогласования различают:
•малые перемещения, при которых ни один из регуляторов не ограничивается, и система работает как линейная;
•средние перемещения, при которых отработка происходит при ограничении РС, т.е. при ограничении тока якоря и ускорения привода (треугольный график скорости);
•большие перемещения, при отработке которых в течение некоторого времени двигатель работает на установившейся скорости из-за ограничения РП, а РС ограничивается при разгоне и торможении (трапецеидальный график скорости).
По технологическим требованиям приводы, регулируемые по
положению, могут быть разделены на две группы:
•производительность механизма зависит лишь от времени отработки наибольшего перемещения. Для таких приводов целесообразно применять более простые схемы, в которых регулятор положения имеет линейную характеристику и настраивается из условия отработки наибольшего пути механизма. При этом увеличение времени отработки меньших перемещений по сравнению со временем их отработки при «оптимальной» настройке не имеет практического значения. Важно лишь, чтобы это время не превышало максимально допустимого (летучие ножницы прокатных станов, работающие в режиме непрерывного вращения с корректировкой положения ножей относительно переднего конца проката).
12
•По технологическим условиям необходимо обеспечить минимально возможное для каждой величины перемещения время отработки (нажимные винты некоторых типов прокатных станов). В этом случае РП должен иметь параболическую характеристику.
10.2.Линейный регулятор положения
10.2.1.Малые перемещения
Внутренними контурами системы регулирования являются контуры тока и скорости. Рассмотрим структурную схему контура положения, в предположении, что контур скорости настроен на модульный оптимум.
uзп |
|
|
|
uзс |
|
|
1/ Кс |
|
ω |
|
Сп |
|
S |
|
|
|
Wрп( р) |
|
|
||||||||||
|
|
|
|
|
асТтр(Ттр+1)+1 |
|
|
р |
|
|||||
|
|
|
|
|
|
|
|
|
||||||
|
|
uосп |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||
Кп
Рис. 10.2. Структурная схема контура регулирования положения со свернутым контуром скорости
В соответствии со структурной схемой рис. 10.2 запишем передаточную функцию объекта управления контура положения:
W |
( р) = uосп( р) |
= |
|
|
|
1/ Kс |
|
|
×Cп K |
|
= |
|
||||||||||||
о |
|
|
u |
зп |
( р) |
|
|
а Т |
|
р(Т |
т |
р+1) +1 |
|
p |
|
п |
|
|
||||||
|
|
|
|
|
|
|
|
с т |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
= |
|
|
|
|
СпКп/ Кс |
|
|
≈ |
СпКп/ Кс |
. |
(10-1) |
||||||||||||
|
|
р |
|
|
+1 |
|
||||||||||||||||||
|
|
|
|
а Т |
р(Т |
т |
р |
+1) |
|
р(а Т |
р+1) |
|
|
|||||||||||
|
|
|
|
|
[ |
|
с т |
|
|
|
|
|
] |
|
с т |
|
|
|
|
|
||||
Передаточная функция регулятора положения определится из выражения:
Wрп( р) × |
СпКп/ Кс |
|
|
= |
|
|
|
1 |
, |
|
|
(10-2) |
|||||
|
р (асТтр+1) |
|
|
апасТт р (асТтр+1) |
|
|
|
||||||||||
Wрп( р) = Крп = |
|
|
|
Кс |
|
|
|
. |
|
|
|
|
|
(10-3) |
|||
|
а а Т |
т |
С К |
|
|
|
|
|
|
||||||||
|
|
|
п с |
|
|
п |
п |
|
|
|
|
|
|||||
Передаточная функция замкнутой системы регулирования: |
|
|
|
||||||||||||||
|
S( p) |
|
|
|
|
р |
( p) |
|
|
|
1 |
Кп |
|
|
|
||
з |
|
|
|
Wп |
|
|
|
|
|
. |
|
||||||
Wп ( p) = |
uзп( p) |
= |
|
|
р |
( p) |
|
= |
aпaсTтp(aсTтp +1) |
+1 |
|
(10-4) |
|||||
|
|
|
1+Wп |
|
|
Кп |
|
|
|||||||||
При ап = ас = 2 |
получим: |
|
|
|
|
|
|
|
|
|
|
||||||
13
Крп = |
|
Кс |
|
. |
(10-5) |
|
4Т |
т |
С К |
|
|||
|
|
п |
п |
|
||
з |
|
1 Кп |
. |
|
||
Wп |
( р) = |
|
|
(10-6) |
||
4Ттр(2Ттр+1) +1 |
||||||
|
|
|
|
|||
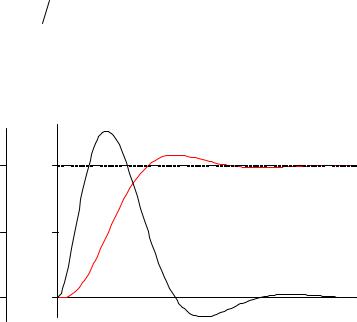
При отработке скачка задания перерегулирование будет в пределах 4÷8% (рис. 10.3).
ω |
s |
sз |
s |
|
0.8 |
||||
0.10 |
|
|
||
0.4 |
0.05 |
|
ω |
|
|
|
|||
0.0 |
0.00 |
|
t |
|
|
|
|
||
Рис. 10.3. Отработка малого перемещения ( Мс = 0) |
||||
Обычно для систем позиционирования режим малых перемещений не является характерным, а выбор Крп по формуле (10-3) при средних и больших
перемещениях не обеспечивает требуемого характера отработки.
10.2.2.Средние перемещения
Вбольшинстве промышленных электроприводов с позиционными системами, наилучшим считается процесс отработки перемещения, при котором скорость меняется по треугольному графику. Это позволяет в полной мере использовать перегрузочную способность двигателя и исключить перерегулирование по положению. Для обеспечения такого характера отработки при заданном перемещении требуется определенное значение коэффициента усиления РП.
Определим значение Крп, необходимое для отработки системой средних
ибольших перемещений, при следующих допущениях:
•контур регулирования тока якоря не обладает инерцией (Тт = 0);
•коэффициент усиления РС настолько велик, что даже небольшое напряжение на выходе РП насыщает РС.
14
Разгон привода при отработке перемещения заканчивается в момент равенства сигналов задания и обратной связи на входе регулятора скорости
(предполагается Rс = Rзс): |
|
|
|
|||||
(S |
з |
− S |
ф |
)K |
K = K ω |
, |
(10-7) |
|
|
|
|
п рп |
с р |
|
|||
где Sз - заданное перемещение для отработки; Sф– фактическое перемещение,
отработанное к моменту равенства сигналов на входе регулятора скорости. Уравнение движения при условии максимального использования двигателя
по перегрузочной способности:
Mтах − Mс = J dω = Jεтах, |
(10-8) |
dt |
|
где Мтах – максимальный момент двигателя, определяемый ограничением
регулятора скорости (задатчиком интенсивности). Из уравнения (10-8) получим:
εтах = |
Mтах |
− Mс |
. |
(10-9) |
J |
|
|||
|
|
|
|
Пройденный путь и время движения к моменту окончания разгона:
|
C ε |
t2 |
|
(10-10) |
Sф = |
п тах |
р |
, |
|
2 |
|
|
||
|
|
|
|
tр = |
|
|
2Sф |
. |
|
|
|
|
|
|
(10-11) |
|
|
Спεтах |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||
Скорость в момент окончания разгона: |
|
|
|
|||||||||
ωр = εтахt р |
= εтах |
2Sф |
= |
2Sфεтах |
= |
|||||||
C ε |
|
C |
п |
|||||||||
|
|
|
|
|
|
п тах |
|
|
|
|||
|
= |
|
2Sф(Mтах − Mс) |
|
. |
|
|
|
(10-12) |
|||
|
|
|
CпJ |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||
Торможение, как и разгон должно происходить при максимальном моменте двигателя, поэтому:
ωт = |
2(Sз − Sф)(Мтах + Mс) |
. |
(10-13) |
|
CпJ |
||||
|
15
Определим значение пути, с которого начинается процесс торможения. Так как ωр =ωт (скорость при окончании разгона равна начальной скорости
торможения), имеем:
|
2 Sф(Mтах − Mс) |
|
= |
|
2 (Sз − Sф)(Mтах |
+ Mс) |
. |
|
|
|
|
(10-14) |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
CпJ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CпJ |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Приравняв подкоренные выражения уравнения (10-14) найдем Sф: |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
Sф(Mтах −Mс) = (Sз − Sф)(Mтах + Mс), |
|
|
|
|
|
|
|
(10-15) |
||||||||||||||||||||||||||||||||||||||||||
SфMтах − SфМс = SзMтах + SзMс − SфMтах − SфMс , |
(10-16) |
|||||||||||||||||||||||||||||||||||||||||||||||||
S |
ф |
= S |
з |
|
Mтах |
+ Mс |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(10-17) |
||||||||||||||||||
|
|
|
2Mтах |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Найдем связь между необходимым для оптимальной настройки коэффи- |
||||||||||||||||||||||||||||||||||||||||||||||||||
циентом усиления РП |
|
(Крп) |
и величиной задаваемого перемещения (Sз) . |
|||||||||||||||||||||||||||||||||||||||||||||||
Для этого подставим выражение для скорости ωр (10-12) в формулу (10-7): |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
(Sз |
− Sф) = |
|
|
K |
с |
|
|
|
|
|
|
|
|
2Sф(Mтах − Mс) |
. |
|
|
|
|
|
|
|
|
|
(10-18) |
|||||||||||||||||||||||||
KпK рп |
|
|
|
|
|
|
|
|
|
CпJ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Подставим в (10-18) значение Sф по уравнению (10-17): |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
Sз − Sз |
Mтах + Mс |
= |
|
|
|
|
|
Kс |
|
|
|
|
2 Sз(Mтах + Mс)(Mтах |
− Mс) |
, (10-19) |
|||||||||||||||||||||||||||||||||||
|
|
2M |
тах |
|
|
K |
п |
K |
рп |
|
|
|
|
|
|
|
2 M |
|
|
C J |
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тах п |
|
|
|
|
|
|
|
|
|
||||||||||||
S |
з |
Mтах − Mс |
= |
|
|
|
|
|
Kс |
|
|
|
Sз(Mтах + Mс)(Mтах − Mс) |
. |
(10-20) |
|||||||||||||||||||||||||||||||||||
|
2M |
мах |
|
|
|
K |
п |
K |
рп |
|
|
|
C JM |
тах |
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Возведем левую часть равенства (10-20) в квадрат и разрешим |
||||||||||||||||||||||||||||||||||||||||||||||||||
полученное уравнение относительно Крп: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
Sз2 (Mтах − Mс) 2 |
= |
|
|
|
|
|
Kс |
|
|
|
|
Sз (Mтах + M с) (Mтах − Mс) , (10-21) |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
рп |
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
4Mтах |
|
|
|
|
|
|
|
|
|
KпK |
|
|
|
|
|
|
CпJ Mтах |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K рп = |
|
Kс 4Mтах |
|
× |
Mтах + Mс |
= |
Kс 4IтахCФ |
× |
Iтах + Iс |
= |
||||||||||||||||||||||||||||||||||||||||
|
K |
п |
|
|
|
C JS |
з |
|
|
|
M |
тах |
− M |
с |
K |
п |
|
|
|
|
C JS |
з |
I |
тах |
− I |
с |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|||||||||||||||||
16

= Kс |
|
4IтахRэ |
×Iтах+Iс . |
|
|
|
|
(10-22) |
|||||||||
Kп |
|
TмСФСпSз |
Iтах−Iс |
|
|
|
|
|
|
||||||||
При Мс = 0, учитывая, что |
J |
= |
Т |
м |
СФ |
получим: |
|
||||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
СФ |
|
|
Rэ |
|
|
|
|||
Крп = |
Кс |
4Мтах |
= |
Кс |
|
4IтахRэ |
. |
(10-23) |
|||||||||
К |
п |
С JS |
з |
К |
п |
Т |
м |
СФС |
п |
S |
|||||||
|
|
п |
|
|
|
|
|
|
|
|
з |
|
|||||
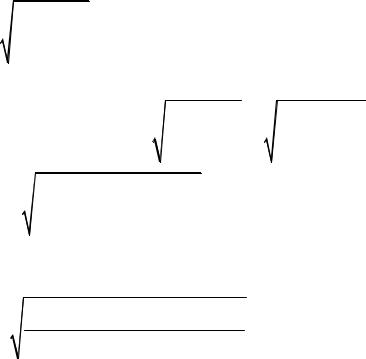
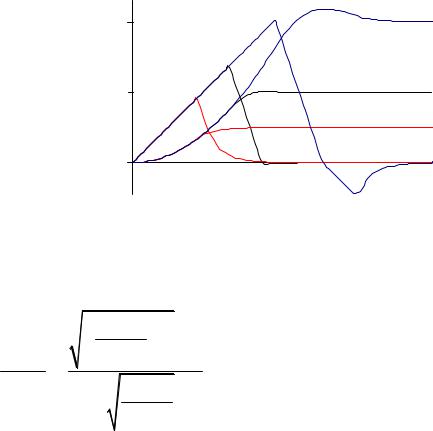
На рис. 10.4 изображены кривые изменения тока, скорости, перемещения |
|||||||||||||||||
при отработке задания Sз. Крп рассчитан по формуле по (10-23). |
|
||||||||||||||||
|
|
|
о.е. |
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
sз=sопт |
|
|
|
s |
|
|
|
|
|
||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-1 |
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
-2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 10.4. Отработка среднего настроечного перемещения ( Мс = 0) |
|||||||||||||||||
Поскольку |
РП настроен на конкретное значение перемещения |
||||||||||||||||
( Sз = Sопт) |
|
– |
регулятор линейный!!!, то меньшие перемещения |
||||||||||||||
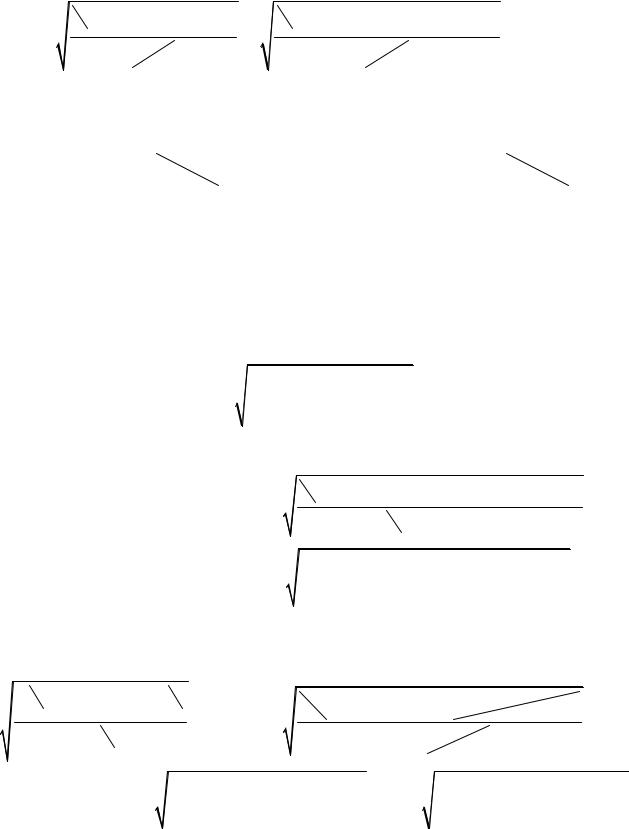
отрабатываются с дотягиванием, большие – с перерегулированием (рис. 10.5). |
|||||||||||||||||
Настроечное перемещение (рис. 10.5, ω2, S2). |
|
||||||||||||||||
На участке от tо до t2' ускорение привода постоянно и определяется
динамическим моментом Мд = Мтах − Мс. В момент времени t2' скорость станет равной ωр, а перемещение достигнет значения Sф, при котором будет
выполняться равенство (10-7), означающее, что сигнал РП и сигнал обратной связи по скорости равны друг другу. В следующий момент времени сигнал обратной связи превысит выходное напряжение РП и напряжение на выходе РС, а, следовательно, и ток якоря, поменяют знак. Начавшийся процесс
торможения должен закончиться в момент времени t"2, когда рассогласование станет равным нулю.
17
о.е. |
|
|
|
ω3 |
|
|
s3 з > sопт |
2 |
|
|
ω3′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω2 |
|
|
s2з = sопт |
||
1 |
|
ω1′ |
|
|
|
||
|
ω1 |
|
|
|
|
s1з < sопт |
|
0 |
t' |
t'' t''' |
|
|
|
t'''' |
'''' t |
t |
' '' |
|
''' |
||||
o |
1 |
1 1 |
t3 t3 |
|
t3 |
1 |
t3 |
|
|
t' |
t'' |
|
|||
|
|
2 |
|
2 |
|
|
|
Рис. 10.5. Отработка средних перемещений ( Мс = 0) |
|||||||
Перемещение меньше, чем настроечное (рис. 10.5, ω1, ω1' , S1). |
|||||||
Во время разгона от to до t1' закон изменения скорости тот же самый, так |
|||||||
как определяется значением Мд = Мтах − Мс. Поскольку Крп меньше |
|||||||
требуемого (в соответствии с (10-23), чем меньше S3, тем больше должно быть |
|||||||
Крп), то равенство (10-7) обеспечивается при меньшем значении скорости (в |
|||||||
момент времени |
t1' вместо t1''). Торможение начнется с меньшей скорости, |
||||||
поэтому РС выйдет из насыщения в момент времени |
t1'''. Ток якоря станет |
||||||
меньше максимального, что приведет к снижению темпа торможения по |
|||||||
сравнению с |
торможением |
при треугольном графике |
скорости. Отработка |
||||
перемещения на интервале t1''' −t1'''' будет происходить с меньшим, чем раньше ускорением, т.е. с дотягиванием.
Перемещение больше, чем настроечное (рис. 10.5, ω3, ω'3, S3).
В период разгона от to до t3'' скорость меняется по линейному закону,
определяемому Мд = Мтах − Мс. Так как Крп больше требуемого, то равенство (10-7) выполнится при большем значении скорости (в момент
18
времени t3'' вместо t3' ). Торможение начинается с большей скорости, поэтому в |
|||||||||
момент достижения заданного положения (t3''') скорость отлична от нуля. |
|||||||||
Позиционирование |
привода |
на интервале |
t3''' −t3'''' будет осуществляться с |
||||||
перерегулированием. |
|
|
|
|
|
|
|||
Если |
Мс ≠ 0, то темп торможения электропривода больше, чем темп |
||||||||
разгона, так как статический момент противоположен моменту двигателя при |
|||||||||
разгоне и совпадает при торможении. Поэтому треугольники скорости |
|||||||||
неравнобедренные (рис. 10.6). |
|
|
|
|
|
||||
|
о.е. |
|
|
|
|
s3 з > sопт |
|
||
|
|
|
2 |
|
|
ω3 |
|
|
|
|
|
|
|
|
|
s2з = sопт |
|
||
|
|
|
1 |
|
ω1 |
ω2 |
|
|
|
|
|
|
|
|
s1з < sопт |
|
|||
|
|
|
|
|
|
|
|||
|
|
|
0 |
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
Рис. 10.6. Отработка средних перемещений ( Мс = Мн) |
|
||||||||
Относительное увеличение времени регулирования при отработке |
|||||||||
перемещений, |
меньших |
настроечного, |
|
ориентировочно |
выражается |
||||
зависимостью: |
|
|
|
|
|
|
|
|
|
|
8 |
|
Sо |
+1 +1 |
|
|
|
|
|
t |
= |
Sопт |
. |
|
|
|
(10-24) |
||
tопт |
|
|
Sо |
|
|
|
|
||
|
4 |
|
|
|
|
|
|
||
|
|
|
Sопт |
|
|
|
|
|
|
|
|
|
|
10.2.3. Большие перемещения |
|
||||
При отработке больших перемещений двигатель какое-то время работает на установившейся скорости, как правило, равной номинальной. Для этого выходное напряжение РП ограничивается на величине, соответствующей заданию на номинальную скорость. В этом случае при определении Крп по
формуле (10-22) исходят из требования отработки по треугольному графику
19
скорости некоторого настроечного перемещения Sз. В качестве принимают перемещение, при котором ωр =ωн.
Определим необходимую величину Крп.
Скорость окончания разгона и начала торможения:
ωн =εрt р =εтtт.
Ускорение при разгоне:
εр = Mтах − Mс .
J
Замедление при торможении:
εт = Mтах + Mс .
J
Время разгона: t р = ωεрн .
Время торможения: tт = ωεтн .
Sз обычно
(10-25)
(10-26)
(10-27)
(10-28)
(10-29)
Учитывая уравнения (10-25)÷(10-29), путь, пройденный за время разгона и торможения, определится следующим образом:
|
|
|
|
|
|
|
|
|
2 |
|
|
С |
|
|
|
2 |
|
|
|
|
2 |
|
|
|
2 |
|
|
|||||
|
Sз = S р + Sт = |
|
Спεрt р |
+ |
пεтtт |
= |
Спεрωн |
+ |
Спεтωн |
= |
|
|||||||||||||||||||||
|
|
|
2 |
|
|
2 |
|
|
|
|
2εр2 |
|
|
|
2εт2 |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
2 |
|
1 |
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
= |
Спωн |
|
+ |
= |
СпωнJ |
|
|
|
|
|
|
|
+ |
|
|
|
|
= |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
2 |
|
|
εр |
|
|
εт |
|
|
|
2 |
|
|
Mтах − Mс |
|
Mтах + Mс |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
= |
Спωн2JMтах |
= |
|
|
|
|
ωн2J Сп |
|
|
|
|
|
|
|
= |
|
|
ωн2TмCФСп |
|
. |
|
|
||||||||||
2 |
2 |
|
|
|
|
|
|
|
|
Iс |
|
|
2 |
|
|
|
|
|
|
|
Iс 2 |
|
(10-30) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
Mтах − |
Mс |
|
СФI |
|
|
|
|
|
|
|
|
|
I |
R |
|
|
|
||||||||||||||
|
|
|
|
|
|
1 − |
|
|
|
|
|
|
|
|
|
|
|
1 |
− |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
тах |
|
|
Iтах |
|
|
|
|
|
тах э |
|
|
|
Iтах |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Подставив выражение для Sз по (10-30) в уравнение (10-22), определим коэффициент усиления РП:
20