

СКЕ_1 / Модуль4. Регулирование ЭДС и положения электропривода
.pdfне показана). ПИ-регулятор тока собран на усилителе РТ. Сигнал обратной связи по току поступает с шунта на датчик тока ДТ и затем на суммирующий
вход регулятора тока РТ. П-регулятор ЭДС выполнен на усилителе РЭ. Выходное напряжение регулятора ЭДС ограничивается с помощью стабилитронов (СТ1, СТ2 ). Для формирования сигнала отрицательной обратной связи по ЭДС используется датчик ЭДС ДЭ. Сигнал, пропорциональный напряжению двигателя, снимается с делителя напряжения Rд и подается на один из входов датчика ЭДС ДЭ через фильтр RнСн. Фильтр выполняет функцию апериодического звена с постоянной времени Тя в цепи обратной связи по ЭДС. На второй вход ДЭ подается сигнал токовой компенсации. Фильтр RэСэ выполняет функцию апериодического звена с постоянной времени Тя на входе системы регулирования.
Структурная схема САР скорости, соответствующая принципиальной схеме рис. Е-1, показана на рис. Е-2. Контур тока изображен в свернутом виде. Предполагается, что внутренняя обратная связь по ЭДС двигателя компенсирована.
Для удобства моделирования и анализа результатов приведем структурную схему контура скорости к системе относительных единиц.
Е2. Приведение структурной схемы САР скорости к системе относительных единиц
Основные базовые величины аналогичны таковым для контура регулирования скорости с П-регулятором. Определим базовые величины переменных в узле сравнения напряжения задания Uзс и напряжения
обратной связи по ЭДС Uосэ, задавшись единичным коэффициентом в цепи
обратной связи.
Цепь обратной связи по ЭДС двигателя.
k |
н |
= К |
н |
Едвб |
=1, |
U |
|
= К |
Е |
|
=U . |
(Е-1) |
|
|
|
||||||||||
|
|
|
|
осэ |
|
н дв |
зс |
|
||||
|
|
|
|
Uосэб |
|
|
б |
|
|
б |
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Это напряжение равно действительному выходному напряжению датчика ЭДС при скорости двигателя ω =ωо.
31
U |
зс |
|
Wф( р) |
|
|
|
Kрэ |
Uзт |
Wтз( р) |
I I |
с |
|
|
|
Едв |
|
|
ω |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rэ |
|
|
1 |
|
|
|
||||
|
1 |
|
|
|
|
|
КтТм |
|
1 Кт |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Ттр(Тµ р+1) +1 |
|
|
|
|
|
|
|
|
|
|
СФ |
|
|
|
||
|
|
|
Тяр+1 |
|
|
|
|
ас(Тт +Тя)RэКн |
|
|
|
|
|
|
|
|
Тмр |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uосэ |
|
Wосэ( р) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
Кн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
Тяр+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. Е-2. Структурная схема однократно-интегрирующей САР скорости с обратной связью по ЭДС двигателя
uзс wф( р) |
|
|
|
|
|
kрэ |
|
|
|
uзт |
|
з |
( р) |
i |
iс едв =υ |
|||||||||||||
|
|
|
|
|
|
|
|
wт |
||||||||||||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ρэ |
|
||
|
|
|
|
|
Тм |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
Т р+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
р(Т р+1) +1 |
|
|
|
|
|
Т р |
|
|
|||
|
|
|
а |
э |
(Т |
+Т |
) ρ |
э |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
я |
|
|
|
|
|
т |
я |
|
|
т |
µ |
|
|
|
|
|
|
|
м |
|
||||||
|
|
|
|
|
uосэ |
|
|
|
|
|
|
|
wосэ( р) |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тяр+1 |
|
|
|
|
|
|
|
|
|
|
|
|
Рис. Е-3. Структурная схема однократно-интегрирующей САР скорости с обратной свяью по ЭДС двигателя в относительных единицах
32
После расчета базовых величин определим передаточные функции элементов структурной схемы в относительных единицах.
1. Цепь отрицательной обратной связи по ЭДС двигателя.
w |
|
( р) |
=W |
|
|
|
|
( р) |
|
Едвб |
|
= |
|
|
|
Кн |
|
|
× |
|
|
Едвб |
|
|
= |
1 |
|
. |
(Е-2) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Т |
|
|
р+1 |
К |
|
Е |
|
|
|
Т р+ |
1 |
|||||||||||||||||||||||||||
осэ |
|
|
|
|
осэ |
|
|
U |
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
зс |
|
|
|
|
|
я |
|
|
|
|
|
|
|
|
дв |
|
|
я |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
2. Регулятор ЭДС двигателя. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Uзс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КтТм |
|
|
|
|
Кн |
Едв |
|
|
|
|||||||||||||
|
kрэ |
=Kрэ |
|
|
|
б |
|
|
= |
аэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
× |
|
|
|
|
б = |
|
|
|||||||||||||||
|
Uзтб |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(Тт +Тя)Rэ Кн |
|
|
Кт Iб |
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
= |
|
|
|
|
|
|
Т |
м |
|
|
|
|
|
|
|
× |
Uб |
|
= |
|
|
|
|
|
Тм |
|
|
|
|
. |
|
|
(Е-3) |
|||||||||||
|
|
|
|
|
|
аэ(Тт |
+Тя)Rэ |
|
Iб |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
аэ(Тт +Тя)ρэ |
|
|
|
|||||||||||||||||||||||||||||||||
|
3. Контур регулирования тока. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
wз ( р) =W |
з( р) |
Uзтб |
|
= |
|
|
|
|
|
|
|
|
1 Кт |
|
|
× Кт Iб = |
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
т |
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
Iб |
|
|
|
|
Ттр(Тµ р+1) +1 |
|
|
Iб |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(Е-4) |
||
|
|
|
|
|
|
|
|
Ттр(Тµ р+1) +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
4. Двигатель. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
Rэ |
|
|
× |
Iб |
= |
|
|
Rэ |
|
× |
|
Iб |
= |
|
ρэ |
|
, |
|
|
|
|
|
|
|
|
|
(Е-5) |
||||||||||||||||||||
|
|
Тмр |
|
|
|
|
|
|
|
|
|
|
Тмр |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
Едвб |
|
|
|
Тмр |
|
|
Uб |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
Едв |
|
|
|
|
|
|
|
|
|
|
|
|
U |
б |
СФ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
СФ |
|
|
|
|
|
б |
|
|
= СФб |
|
|
|
|
|
|
|
б |
=1. |
|
|
|
|
|
|
|
|
|
|
|
(Е-6) |
||||||||||||||||||
|
|
|
ωб |
|
|
Uб |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5. Фильтр на входе системы регулирования. |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uзс |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
wф( р) =Wф( р) U |
б |
= |
|
Т р+1. |
|
|
|
|
|
|
|
|
|
|
|
(Е-7) |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
зс |
|
|
|
|
|
|
|
я |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
На рис. Е-3 изображена структурная схема системы автоматического регулирования скорости с обратной связью по ЭДС двигателя в относительных единицах, соответствующая структурной схеме на рис. Е-2.
33
Е3. Расчет параметров структурной схемы САР скорости
На основании уравнений (Е-2) – (Е-7) рассчитать численные значения передаточных функций элементов структурной схемы (рис. Е-3):
•регулятора ЭДС,
•замкнутого контура тока,
•двигателя,
•фильтра на входе системы регулирования,
•цепи обратной связи по ЭДС двигателя.
Варианты заданий для выполнения работы приведены в приложении 1.
Е4. Исследование переходных процессов при пуске и реверсе двигателя без нагрузки (выход регулятора скорости ограничен)
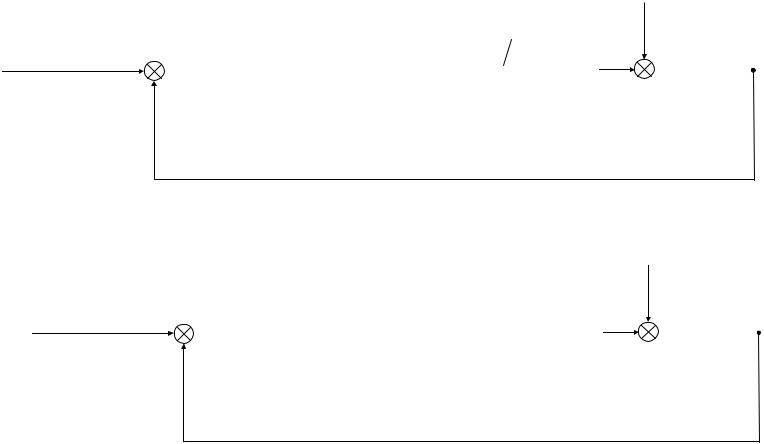
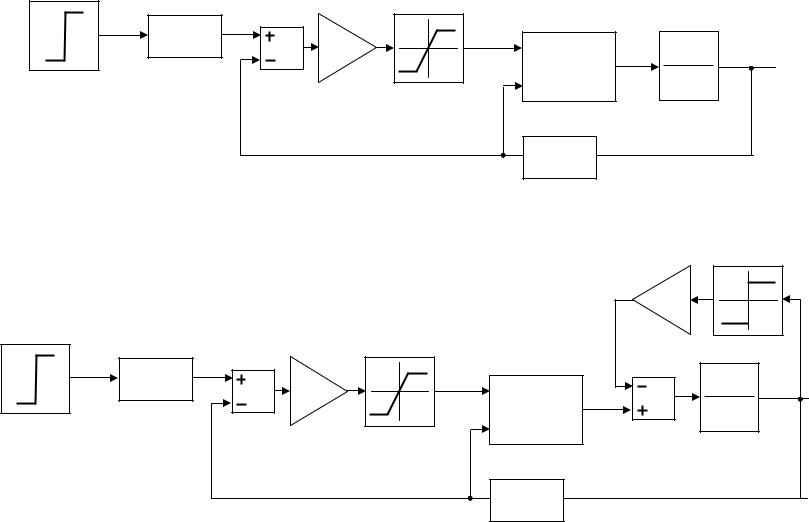
Е4.1. Рассчитать параметры типовых блоков SIMULINK, соответствующих структурной схеме модели, изображенной на рис. Е-4. Пуск двигателя осуществляется до скорости υ1. Регулятор ЭДС должен
ограничивать ток при пуске и торможении на уровне imax . Е4.2. Определить:
• время пуска двигателя до установившейся скорости υ1
t |
п |
= |
Тмυ1 |
, |
(Е-8) |
|
|||||
|
|
ρэimax |
|
||
• время работы с установившейся скоростью |
|
||||
t р = 2tп, |
(Е-9) |
||||
• |
время торможения до нулевой скорости υ = 0 |
|
|||
tт =tп, |
(Е-10) |
||||
•время пуска двигателя до установившейся скорости −υ1 по формуле
(Е-8),
•время моделирования
tм =tп +t р +tт +tп. |
(Е-11) |
34
uзс |
u |
|
wз |
|
( р) |
|
|
υ |
wф( р) |
зт |
т |
|
i |
|
|||
kрэ |
In1 |
Out1 |
ρэ |
|||||
|
|
|
In2 |
|
Т |
р |
||
|
|
|
|
|
|
|||
|
|
|
|
|
|
м |
|
|
|
uосэ |
PI −current |
|
|
||||
|
|
wф( р) |
|
|
|
|||
|
|
|
|
|
|
|||
Рис. Е-4. Структурная схема модели контура скорости с регулятором ЭДС и ограничением задания на ток якоря (пуск и реверс без нагрузки)
Signum
uзс |
u |
|
з |
i |
wф( р) |
зт |
wт( р) |
||
kрэ |
In1 |
|
||
|
|
|
In2 Out1 |
|
|
uосэ |
PI −current |
||
|
|
wф( р) |
|
|
|
|
|
|
|
ic |
|
|
iс |
|
υ |
ρэ |
||
|
|
|
Т |
р |
|
м |
|
|
Рис. Е-5. Структурная схема модели контура скорости с регулятором ЭДС и ограничением задания на ток якоря (пуск и реверс под нагрузкой)
35

Е4.3. Выполнить моделирование с выводом на одном графике задания на скорость, тока, скорости.
Е4.4. По графикам определить:
•время пуска,
•время торможения,
•ток якоря при пуске,
•ток якоря при торможении,
•ток якоря в установившемся режиме.
Е4.5. Сравнить расчетные значения tп, tт с результатами моделирова-
ния систем регулирования скорости с П- и ПИ-регуляторами скорости. Е4.6. Проанализировать полученные результаты, сделать выводы.
Е5. Исследование переходных процессов при пуске и реверсе двигателя под нагрузкой (выход регулятора скорости ограничен)
Е5.1. Рассчитать параметры типовых блоков SIMULINK, соответствующих структурной схеме модели, изображенной на рис. Е-5.
Пуск двигателя осуществляется до скорости υ1. Регулятор ЭДС должен ограничивать ток при пуске и торможении на уровне imax .
Задание на статический ток определяется моментом нагрузки:
i |
= µ |
с |
= |
Мс1 |
. |
(Е-12) |
|
||||||
с |
|
|
Мн |
|
||
Поскольку момент нагрузки пассивный, то для его задания используются блок Signum и усилитель с коэффициентом усиления численно равным статическому току ic. Блок Signum обеспечивает соответствие знака
момента нагрузки знаку скорости. Е5.2. Определить:
• время пуска двигателя до установившейся скорости υ1
tп = ρ (iТмυ1−i ) , э max c
• время работы с установившейся скоростью
t р = 2tп,
(Е-13)
(Е-14)
36
• |
время торможения до нулевой скорости υ = 0 |
|
||||
t |
т |
= |
Тмυ1 |
, |
(Е-15) |
|
ρэ(imax +ic) |
||||||
|
|
|
|
|||
•время пуска двигателя до установившейся скорости −υ1 (формула
(Е-13)),
•время моделирования
tм =tп +t р +tт +tп, |
(Е-16) |
||
• статическую ошибку регулирования скорости |
|
||
∆υэ = |
µсρэ |
ас(Тт+Тя), |
(Е-17) |
|
|||
|
Тм |
|
|
• естественный статизм привода |
|
||
∆υе = µсρэ. |
(Е-18) |
||
Е5.3. Задать следующие параметры моделирования (Simulation parameter)
вразделе разрешенные опции (Solver option):
•Интегрирование с постоянным шагом (Fixed-step),
•Способ моделирования – ode2(Heun),
•Шаг интегрирования (Fixed step size) – 0.001 с.
Данное решение обусловлено особенностями моделирования момента статической нагрузки.
Выполнить моделирование с выводом на одном графике задания на скорость, тока, скорости.
Е5.4. По графикам определить:
•время пуска,
•время торможения,
•статическую ошибку по скорости,
•ток якоря при пуске,
•ток якоря при торможении,
•ток якоря в установившемся режиме.
Е5.5. Сравнить расчетные значения tп, tт, ∆υэ с результатами модели-
рования систем регулирования скорости с П- и ПИ-регуляторами скорости. Е5.6. Проанализировать полученные результаты, сделать выводы.
37

Е6. Исследование переходных процессов при набросе нагрузки в различных системах регулирования скорости
Е6.1. Составить модель, включающую в себя:
• разомкнутую систему регулирования скорости (рис. Е-6),
|
uзс |
|
|
|
|
i |
|
iс |
|
|
|
υ |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ρ |
э |
|
|
||||||||||
|
1 |
ρэ |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
р |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
Тэр+1 |
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. Е-6. Разомкнутая система регулирования скорости
•систему регулирования скорости с обратной связью по ЭДС двигателя и П-регулятором ЭДС (рис. Е-5),
•систему регулирования скорости с обратной связью по скорости и П- регулятором (рис. Г-7 /8/),
•систему регулирования скорости с обратной связью по скорости и ПИрегулятором (рис. Д-4 /8/).
Сигнал задания на скорость поступает на все четыре модели от одного блока Step. Величина сигнала задания uзс соответствует пуску двигателя до скорости υ1.
Сигнал задания статического тока поступает на все четыре модели от одного блока Step. Величина тока ic определяется моментом нагрузки µc
(уравнение (Е-12)). Ток нагрузки появляется в момент времени tн. Е6.2. Определить:
•время пуска tп до скорости υ1 (выражение (Е-8), поскольку пуск производится без нагрузки),
•время tо, в течение которого переходные процессы в контурах тока и
|
скорости завершатся |
|
tо =tп, |
(Е-19) |
|
• |
время появления нагрузки на валу |
|
tн =tп +tо, |
(Е-20) |
|
• |
время моделирования |
|
38
tм =3tп. |
(Е-21) |
Е6.3. Задать следующие параметры моделирования (Simulation parameter)
вразделе разрешенные опции (Solver option):
•Интегрирование с постоянным шагом (Fixed-step),
•Способ моделирования – ode2(Heun),
•Шаг интегрирования (Fixed step size) – 0.001 с.
Данное решение обусловлено особенностями моделирования момента статической нагрузки.
Выполнить моделирование с выводом на одном графике кривых тока и скорости для каждого из четырех случаев, а также задания на скорость и статического тока. На графике должен быть исключен режим пуска двигателя.
Е6.4. По графику определить перерегулирование по току и значение статической ошибки по скорости для каждого из четырех случаев.
Е6.5. Проанализировать полученные результаты, сделать выводы.
Е7. Содержание отчета
Е7.1. Наименование и цель работы.
Е7.2. Принципиальная схема контура регулирования (рис. Е-1).
Е7.3. Расчет передаточных функций элементов системы регулирования. Е7.4. Структурная схема контура регулирования в абсолютных единицах
(рис. Е-2) с числовыми значениями коэффициентов.
Е7.5. Приведение элементов структурной схемы к системе относительных единиц.
Е7.6. Структурная схема контура регулирования в относительных единицах (рис. Е-3) с числовыми значениями коэффициентов.
Е7.7. Исследование переходных процессов при пуске и реверсе двигателя без нагрузки (выход регулятора скорости ограничен).
Е7.7.1. Расчеты по пунктам Е4.1-Е4.2.
Е7.7.2. Структурная схема модели (рис. Е-4) с числовыми значениями коэффициентов.
Е7.7.3. Графики изменения задания на скорость, тока, скорости.
Е7.7.4. Характеристики переходного процесса изменения скорости
(п. Е4.4).
Е7.7.5. Сопоставление результатов расчетов и моделирования.
39
Е7.8. Исследование переходных процессов при пуске и реверсе двигателя под нагрузкой (выход регулятора скорости ограничен).
Е7.8.1. Расчеты по пунктам Е5.1-Е5.2.
Е7.8.2. Структурная схема модели (рис. Е-5) с числовыми значениями коэффициентов.
Е7.8.3. Графики изменения задания на скорость, тока, скорости.
Е7.8.4. Характеристики переходного процесса изменения скорости
(п. Е5.4).
Е7.8.5. Сопоставление результатов расчетов и моделирования.
Е7.9. Исследование переходных процессов при набросе нагрузки в различных системах регулирования скорости.
Е7.9.1. Расчеты по пунктам Е6.1-Е6.2.
Е7.9.2. Графики изменения тока и скорости для каждого из случаев по пункту Е6.1, задания на скорость, статического тока.
Е7.9.3. Характеристики переходного процесса изменения скорости
(п. Е6.4).
Е7.9.4. Сопоставление результатов расчетов и моделирования.
40