

1.5 Розробка основних вимог до системи
Система управління на базі контролера повинна забезпечувати виконання різних режимів роботи ліфта.
У режимі навчання система повинна визначати місцеположення кабіни в шахті.
У режимі нормальної роботи система повинна здійснювати просте змішане управління ліфтом з кабіни і з посадочних майданчиків, з виконанням попутних викликів (збірна система при русі в обох напрямах).
У режимі ревізії управління ліфтом повинно проводиться тільки з поста ревізії на даху кабіни від кнопок «Вгору», «Вниз» і «Стоп». При цьому повинна бути виключена дія: визивних кнопок з поверхів і кнопок наказу з кабіни; ключів перемикачів управління на режими парковки, виклику на спеціальний поверх і незалежного обслуговування; управління з машинного приміщення.
Рух кабіни в режимі ревізії повинен проводиться тільки на малій швидкості, обмежуватися кінцевими вимикачами і можливо лише при повністю закритих дверях кабіни і шахти.
Режим тестових прогонів використовується для обкатки ліфта, перевірки його роботи (правильного функціонування ліфта, реєстрації відмов і збоїв), локалізації дефектних місць, завдання програми роботи ліфта для контролера або зміни раніше закладеної програми.
У режим пожежної небезпеки ліфт повинен переходити автоматично під час вступу сигналу з системи пожежного захисту будівлі або від спеціального ключа на одній з посадочних майданчиків. Перехід в режим повинен здійснюватися для всіх режимів роботи ліфта, окрім режимів ревізії і аварійного переміщення кабіни.
Режим землетрусу повинен включатися від спеціального ключа на одному з посадочних майданчиків або від сейсмодатчика, що має електричний зв'язок з контролером ліфта. При цьому кабіна повинна зупинитися на найближчому посадочному майданчику і стояти там з відкритими дверима.
Окрім стандартних функцій, система повинна забезпечувати точну зупинку з динамічним підстроюванням місцезнаходження в процесі завантаження ліфту.
2 Основна частина
2.1 Розробка структурної схеми системи
На базі розроблених вимог до системи складемо структурну схему.
Схема системи управління в режимі нормальної роботи представлена на рисунку 2.1.
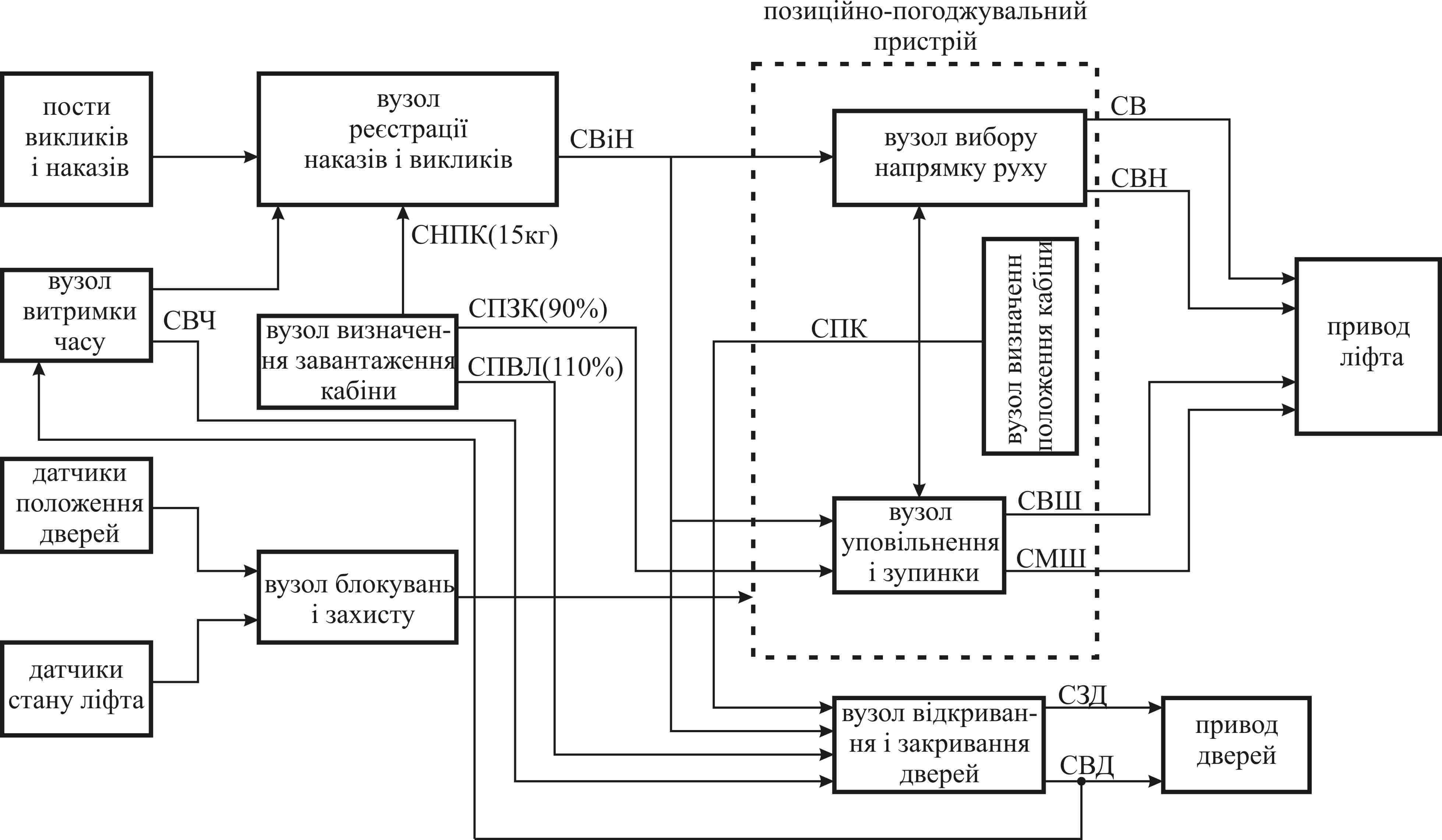
Рисунок 2.1 – Структурна схема системи управління
У схемі прийняті наступні позначення: СВ - сигнал руху вгору, СВН - сигнал руху вниз, СВШ - сигнал великій швидкості, СМШ - сигнал малої швидкості, СЗД - сигнал закривання дверей, СВД - сигнал відкриття дверей, СВЧ - сигнал витримки часу, СВіН - сигнали про виклики і накази, СНПК - сигнал про наявність пасажира в кабіні , СПЗК - сигнал про повне завантаження кабіни, СПВЛ - сигнал про перевантаження кабіни; СПК - сигнал положення кабіни.
Для управління технологічним процесом пересування пасажирського ліфта необхідна наявність трьох рівнів управління (рисунок 2.2).

Рисунок 2.2 - Блок-схема з'єднання апаратних засобів рівнів управління АСУ ТП
Верхній рівень
Останнім часом спостерігається тенденція до оснащення будівель складним інженерним і комунікаційним обладнанням. З'являється необхідність вести спостереження за основними системами життєзабезпечення будівлі для попередження і швидкого реагування на несправності. Дану задачу дозволяє вирішити автоматизована система контролю, управління і диспетчеризації (АСКУД). Її також можна назвати як сервер ЖКГ. Зокрема для ліфтового обладнання АСКУД дозволяє:
контролювати положення кабіни ліфта в режимі реального часу;
формувати звіти про простої, несправності, технічному обслуговуванні;
контролювати доступ в шахту або машинне приміщення;
контролювати вихід ліфтового обладнання з ладу.
У диспетчерську приходить вся інформація з ліфтів підключених до системи. Диспетчер за отриманими даними може направити бригаду на ремонт обладнання, що вийшло з ладу.
На базі звичайної SCADA системи реалізований діалог взаємодії диспетчера і даних, що приходять. Також ведеться журнал подій протягом місяця.
Середній рівень
На середньому рівні відбувається реалізація локальних керуючих алгоритмів (управління приводом); взаємодія між технологічними об'єктами управління; інформаційний обмін з рівнем III.
Для реалізації перерахованих функцій треба застосувати контролер.
Контролер призначений для вимірювання безперервних сигналів, представлених напругою постійного струму і (або) постійним струмом, збору і обробки інформації з первинних датчиків, формування сигналів управління з заданими алгоритмами, прийому і передачі інформації по послідовних каналах зв'язку в системах вимірювання, контролю та управління об'єктами.
Основна область застосування - системи управління переміщенням технологічного обладнання відповідно до заданої програми руху.
Нижній рівень
Нижній рівень АСУ ТП складається з перетворювача частоти для управління асинхронним приводом ліфтової лебідки; джерело живлення для подачі напруги живлення; датчик положення, що визначає точне місцезнаходження кабіни в шахті; два механічних нормально замкнутих гальма; пости викликів і наказів; кінцеві вимикачі «верхній поверх» і «нижній поверх».
На дискретні входи контроллера подаються команди з постів викликів і наказів, сигнали про знаходження ліфта у верхньому і нижньому положенні в шахті, сигнали відкривання закривання дверей кабіни ліфта, сигнали аварій.