

Вопрос 11 linear prediction

Linear prediction (LP) forms an integral part of almost all modern day speech cod- ing algorithms. The fundamental idea is that a speech sample can be approximated as a linear combination of past samples. Within a signal frame, the weights used to compute the linear combination are found by minimizing the mean-squared predic- tion error; the resultant weights, or linear prediction coefficients (LPCs*), are used to represent the particular frame.
Within the core of the LP scheme lies the autoregressive model (Chapter 3). Indeed, linear prediction analysis is an estimation procedure to find the AR para- meters, given samples of the signal. Thus, LP is an identification technique where parameters of a system are found from the observation. The basic assumption is that speech can be modeled as an AR signal, which in practice has been found to be appropriate.
Another interpretation of LP is as a spectrum estimation method. As explained earlier, LP analysis allows the computation of the AR parameters, which define the PSD of the signal itself (Chapter 3). By computing the LPCs of a signal frame, it is possible to generate another signal in such a way that the spectral contents are close to the original one.
LP can also be viewed as a redundancy removal procedure where information repeated in an event is eliminated. After all, there is no need for transmission if certain data can be predicted. By displacing the redundancy in a signal, the amount
of bits required to carry the information is lowered, therefore achieving the purpose of compression.
In this chapter, the basic problem of LP analysis is stated, followed by its adapta- tion toward nonstationary signals. Examples of processing on actual speech samples are provided. Two computationally efficient procedures, namely, the Levinson– Durbin algorithm and the Leroux–Gueguen algorithm, are explained. The concept of long-term linear prediction is described, followed by some LP-based speech synthesis models. Practical issues related to speech processing are explained, with an alternative prediction scheme based on the moving average (MA) model given at the end of the chapter. LP is by no means confined to the speech processing arena; in fact, it is widely applied to many diverse areas. Readers are encouraged to consult other sources for additional information on the topic.
THE PROBLEM OF LINEAR PREDICTION
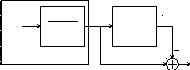
Here, linear prediction is described as a system identification problem, where the parameters of an AR model are estimated from the signal itself. The situation is illustrated in Figure 4.1. The white noise signal x½n] is filtered by the AR process
synthesizer to obtain s½n]—the AR signal—with the AR parameters denoted by ^ai. A linear predictor is used to predict s½n] based on the M past samples; this is done with
M
^s½n] ¼ — X ais½n — i]; ð4:1Þ
i¼1
where the ai are the estimates of the AR parameters and are referred to as the linear prediction coefficients (LPCs)*. The constant M is known as the prediction order. Therefore, prediction is based on a linear combination of the M past samples of the
signal, and hence the prediction is linear. The prediction error is equal to
e½n]¼ s½n]— ^s½n]: ð4:2Þ
 AR
AR
signal
1 s[n]
Predicted signal
i
x[n]
M ai z
White
1â zi
i 1
i
i 1
AR process synthesizer
Signal source
Predictor
e[n] Prediction
error
Figure 4.1 Linear prediction as system identification.
*In some literature, the sign convention for the LPC is reversed.
 s
[
n
] e
[
n
]
s
[
n
] e
[
n
]
z-1 a
1
a
2
s[n]
a
M
Figure 4.2 The prediction-error filter.
That is, it is the difference between the actual sample and the predicted one. Figure 4.2 shows the signal flow graph implementation of (4.2) and is known as the prediction-error filter: it takes an AR signal as input to produce the prediction-error signal at its output.