

Вопрос 4 About Coding Delay
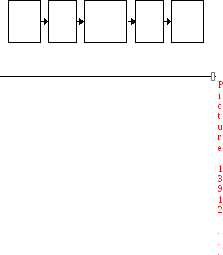
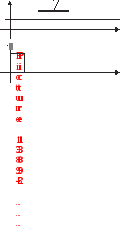
Consider the delay measured using the topology shown in Figure 1.3. The delay obtained in this way is known as coding delay, or one-way coding delay [Chen, 1995], which is given by the elapsed time from the instant a speech sample arrives at the encoder input to the instant when the same speech sample appears at the decoder output. The definition does not consider exterior factors, such as commu- nication distance or equipment, which are not controllable by the algorithm designer. Based on the definition, the coding delay can be decomposed into four major components (see Figure 1.4):
Encoder Buffering Delay. Many speech encoders require the collection of a certain number of samples before processing. For instance, typical linear prediction (LP)-based coders need to gather one frame of samples ranging from 160 to 240 samples, or 20 to 30 ms, before proceeding with the actual encoding process.
Input speech
Measure
time
shift
Encoder Bit-strea
Decoder speech



Delay
Figure 1.3 System for delay measurement.
 Buffer
input
frame
Buffer
input
frame
Encode
Bit
transmission Decode
Output frame
Coding delay
Encoder buffering delay
Encoder processing delay
Transmission delay / Decoder buffering delay
Decoder processing delay
Time
Figure 1.4 Illustration of the components of coding delay.
Encoder Processing Delay. The encoder consumes a certain amount of time to process the buffered data and construct the bit-stream. This delay can be shortened by increasing the computational power of the underlying platform and by utilizing efficient algorithms. The processing delay must be shorter than the buffering delay, otherwise the encoder will not be able to handle data from the next frame.
Transmission Delay. Once the encoder finishes processing one frame of input samples, the resultant bits representing the compressed bit-stream are transmitted to the decoder. Many transmission modes are possible and the choice depends on the particular system requirements. For illustration purposes, we will consider only two transmission modes: constant and burst. Figure 1.5 depicts the situations for these modes.
In constant mode the bits are transmitted synchronously at a fixed rate, which is given by the number of bits corresponding to one frame divided by the length of the frame. Under this mode, transmission delay is equal to encoder buffering delay: bits associated with the frame are fully transmitted at the instant when bits of the next frame are available. This mode of operation is dominant for most classical digital communication systems, such as wired telephone networks.
 Number
of
bits
Number
of
bits
Encoder buffering delay
Time
Time
Figure 1.5 Plots of bit-stream transmission pattern for constant mode (top) and burst mode (bottom).
In burst mode all bits associated with a particular frame are completely sent within an interval that is shorter than the encoder buffering delay. In the extreme case, all bits are released right after they become available, leading to a negligibly small transmission delay. This mode is inherent to packetized network and the internet, where data are grouped and sent as packets.
Transmission delay is also known as decoder buffering delay, since it is the amount of time that the decoder must wait in order to collect all bits related to a particular frame so as to start the decoding process.
Decoder Processing Delay. This is the time required to decode in order to produce one frame of synthetic speech. As for the case of the encoder processing delay, its upper limit is given by the encoder buffering delay, since a whole frame of synthetic speech data must be completed within this time frame in order to be ready for the next frame.
As stated earlier, one of the good attributes of a speech coder is measured by its coding delay, given by the sum of the four described components. As an algorithm designer, the task is to reduce the four delay components to a minimum. In general, the encoder buffering delay has the greatest impact: it determines the upper limit for the rest of the delay components. A long encoding buffer enables a more thorough evaluation of the signal properties, leading to higher coding efficiency and hence lower bit-rate. This is the reason why most low bit-rate coders often have high delay. Thus, coding delay in most cases is atrade-off with respect to theachievable bit-rate.
In the ideal case where infinite computational power is available, the processing delays (encoder and decoder) can be made negligible with respect to the encoder buffering delay. Under this assumption, the coding delay is equal to two times the encoder buffering delay if the system is transmitting in constant mode. For burst mode, the shortest possible coding delay is equal to the encoder buffering delay, where it is assumed that all output bits from the encoder are sent instantaneously to the decoder. These values are idealistic in the sense that it is achievable only if the processing delay is zero or the computational power is infinite: the underlying platform can find the results instantly once the required amount of data is collected. These ideal values are frequently used for benchmarking purposes, since they repre- sent the lower bound of the coding delay.In the simplest form of delay comparison among coders, only the encoder buffering delay is cited. In practice, a reasonable estimate of the coding delay is to take 2.5 to 3 and 1.5 to 2.5 times the frame interval (encoder buffering delay) for constant mode transmission and burst mode transmission, respectively.