

Вопросы и задания
1. Какие типовые регуляторы используются в САУ ? Приведите их передаточные функции.
2. Как рассчитать частотные характеристики САУ с П-регулятором, если известны частотные характеристики САУ без регулятора ?
3. Как изменяются графики ЛАЧХ, ФЧХ при введении в САУ П-регулятора и как изменяются при этом значения косвенных показателей качества САУ – частота среза и запас по фазе ?
4. Как изменяется вид переходного процесса и значения прямых показателей качества при применении П-регулятора ?
5. Назовите достоинства и недостатки П-регулятора.
1.15. Типовые законы регулирования. Влияние
И-регулятора на показатели качества САУ
Вводная часть
Вводная часть та же, что и в теме 1.14.
Основная часть: влияние И-регулятора на показатели качества САУ
а). Для САУ без регулятора имеем следующие характеристики:
Передаточную
функцию  .
.
Частотные характеристики:
-
 ;
;
-
 ;
;
-
 ;
;
-
 .
.
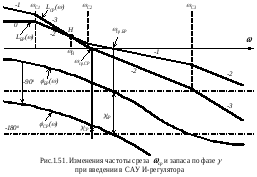
Пусть для объекта управления известны ЛАЧХ LБР(ω) и ФЧХ φБР(ω), форма которых имеет, например, вид, приведенный на рис.1.51. Используя их, определим частоту среза ωср.БР и запас по фазе γБР.
б). Для САУ с
регулятором, имеющим передаточную
функцию
 ,
имеем следующие характеристики:
,
имеем следующие характеристики:
Передаточную
функцию  .
.
Частотные характеристики:
-
 ;
;
-
 ;
(1.61)
;
(1.61)
-
 ;
;
-

 .
.
в). Из расчетов
(1.61) следует, что после введения в схему
САУ И-регулятора ФЧХ
 изменилась на–90о
(рис.1.51). Частоты сопряжения ωС1,
ωС1
и
ωС3
участков ЛАЧХ LБР(ω)
и LСР(ω)
не изменились, но наклоны всех участков
LСР(ω)
изменились на –1
по сравнению с наклонами LБР(ω),
так как в выражении LСР(ω)
содержится дополнительный член
изменилась на–90о
(рис.1.51). Частоты сопряжения ωС1,
ωС1
и
ωС3
участков ЛАЧХ LБР(ω)
и LСР(ω)
не изменились, но наклоны всех участков
LСР(ω)
изменились на –1
по сравнению с наклонами LБР(ω),
так как в выражении LСР(ω)
содержится дополнительный член
 .
При условииωТИ=1
обе ЛАЧХ (LСР(ω)
и LБР(ω))
совпадут, так как
.
При условииωТИ=1
обе ЛАЧХ (LСР(ω)
и LБР(ω))
совпадут, так как
 и, поэтому, согласно последнего выражения
системы (1.61) будетLСР(ω)=LБР(ω).
Совпадение двух графиков LСР(ω)
и LБР(ω),
имеющих разные наклоны участков между
одноименными частотами сопряжения,
является их пересечением при частоте
и, поэтому, согласно последнего выражения
системы (1.61) будетLСР(ω)=LБР(ω).
Совпадение двух графиков LСР(ω)
и LБР(ω),
имеющих разные наклоны участков между
одноименными частотами сопряжения,
является их пересечением при частоте
 ,
которая называется частотой неподвижной
точкиН.
Выбором постоянной времени ТИ
И-регулятора можно получать желаемые
значения частоты ωН
, которые назовем "большими" и
"малыми" значениями. Чтобы САУ не
потеряла устойчивость, а также с целью
ограничения перерегулирования,
целесообразно выбирать большие значения
постоянной времени ТИ
и, соответственно, иметь малую частоту
ωН
неподвижной точки Н.
,
которая называется частотой неподвижной
точкиН.
Выбором постоянной времени ТИ
И-регулятора можно получать желаемые
значения частоты ωН
, которые назовем "большими" и
"малыми" значениями. Чтобы САУ не
потеряла устойчивость, а также с целью
ограничения перерегулирования,
целесообразно выбирать большие значения
постоянной времени ТИ
и, соответственно, иметь малую частоту
ωН
неподвижной точки Н.
г). Используя ЛАЧХ LСР(ω) и ФЧХ φСР(ω), определим частоту среза ωср.СР и запас по фазе γСР.
Из построений вытекают следующие изменения косвенных показателей качества ωср и γ:
- частота среза ωср уменьшится;
- запас по фазе γ уменьшится, главным образом, за счет отрицательного фазового сдвига на –90о ФЧХ.
Прямые показатели качества σ, t1 и tПП в соответствии с соотношениями (1.59) изменятся следующим образом:
- перерегулирование σ увеличится, возможна даже потеря устойчивости при значительном уменьшении постоянной времени ТИ регулятора;
- время затухания колебаний, оцениваемое через tПП, возрастет;
- об изменении t1 ничего определенного сказать нельзя, так как t1 уменьшается при уменьшении γ и увеличивается при уменьшении ωср.
Качественные изменения графика переходного процесса отображены на рис.1.52.

При использовании И-регулятора порядок астатизма САУ увеличивается на единицу. Если исходная САУ была статической, то с введением И-регулятора становится астатической 1-го порядка и, поэтому, статическая ошибка εСТ обратится в ноль, а при исходной астатической САУ 1-го порядка уже две ошибки регулирования – статическая εСТ и скоростная εСК - обратятся в ноль.
д). И-регулятор
имеет серьезный эксплуатационный
недостаток – дрейф нуля или самоход.
Сущность дрейфа поясним на примере
гидравлического сервопривода (рис.1.53),
который является интегрирующим звеном,
если входом считать перемещение
х золотника,
а выходом – перемещение у
силового поршня.
Пусть левый конец штока золотника находится в нулевом положении х=0, так что закрыты оба отверстия І и ІІ (рис 1.53а), которые соединены с левой и правой полостями силового цилиндра. Тогда находящийся в цилиндре поршень неподвижен и Δу=0. Если в результате повышения температуры шток золотника удлинится (рис.1.53б), то при неподвижном левом конце штока (х=0) откроются отверстия І и ІІ. и через отверстие І в левую полость силового цилиндра поступит рабочее вещество, например, масло, с большим давлением рБ, а правая полость через отверстие ІІ соединится с линией малого давления рМ. Силовой цилиндр будет перемещаться вправо при том, что управляющий сигнал х по прежнему остается равным нулю. Такое явление называется дрейфом или самоходом интегрирующего звена, каким является гидравлический сервопривод.
Выводы по применению И-регулятора в САУ
Достоинства И-регулятора:
1. Обращает в ноль одну из ошибок регулирования.
Недостатки И-регулятора:
1. Повышает перерегулирование, колебательность САУ. Возможна даже потеря устойчивости.
2. Снижает быстродействие, оцениваемое временем переходного процесса.
3. Подвержен дрейфу.